摆动式林果采摘头设计与分析
2015-01-02王朋辉李立君高自成闵淑辉
王朋辉,李立君,高自成,闵淑辉,肖 静
(中南林业科技大学 机电工程学院,湖南 长沙410004)
林果收获是林果种植业中一个十分重要的环节,所需劳动力较大,季节依赖性强[1-3]。随着我国林果种植的规范化与规模化,实现林果的机械化采收成为亟需解决的热点问题[4-6]。针对这一现状,通过对多处林果种植基地的实地考察,在进行了一系列资料查找与试验后,设计了适用于林果采收的摆动式林果采摘头。
论述的摆动式林果采摘头与中南林业科技大学李立君[7]等设计研发的油茶果采摘机配套使用,平原、山地地区均能作业,可采摘油茶果、板栗、核桃等经济林坚果。
本文介绍了摆动式林果采摘头的工作原理及其结构设计,开展了动力学分析工作,并对该采摘头进行了动力选型。
1 原理与结构
如图1所示,摆动式林果采摘头由基座、曲柄、导杆/右夹头、左夹头与夹紧液压缸等构成。
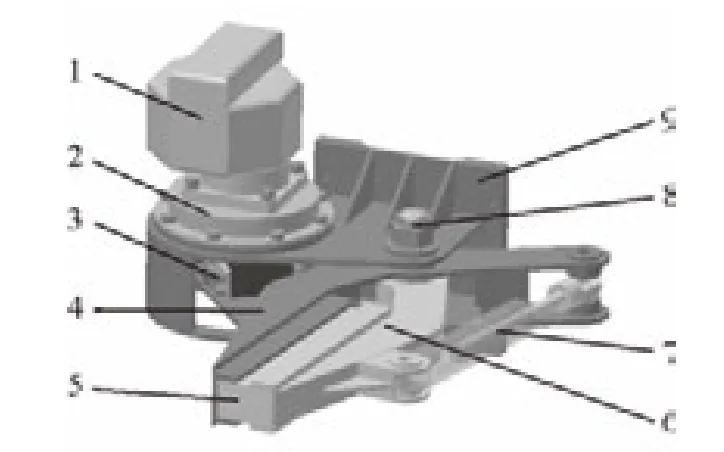
图1 摆动式林果采摘头三维模型Fig.1 The 3Dmodel of oscillating fruit picking head
工作时,先通过夹紧液压缸进油,使左、右夹头夹紧树干,再利用由曲柄、导块和固连再右夹头上的导杆构成的摆动导杆机构[8-10]实现其振动采摘。摆动导杆机构如图2所示。

图2 摆动导杆机构的实现Fig.2 Realization of the swinging rod mechanism
通过实地考察及试验分析可知,采摘对象的树干直径不同所需的振幅和频率不同。为满足这一需要,本文论述的摆动式林果采摘头设计了振幅调节机构(图3),其振动频率则由液压系统流量控制。

图3 振幅调节机构Fig.3 Amplitude adjusting mechanism
工作时,振幅调节机构由双螺母锁紧。当作业目标变化需调节振幅时,可松开锁紧螺母,转动调节螺杆左端扁方,调整调节滑块轴线与振动曲柄主体上部轴孔轴线的间距即可实现振幅调节功能。
摆动式林果采摘头参数如表1所示。
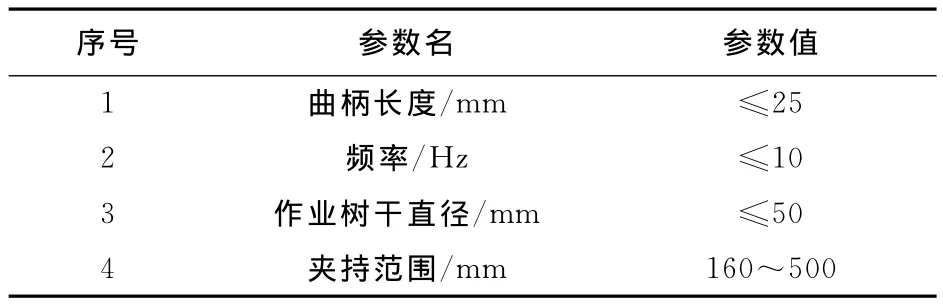
表1 采摘头参数Table 1 The parameter table of picking head
2 采摘头动力学分析
摆动式林果采摘头结构简图如图4所示。
图中,a为曲柄与Y轴夹角,β为导杆与Y轴夹角,h为机架长度,H为曲柄与滑块铰点距导杆回转中心长度,R为夹持距离,L为树干变形长度。

图4 采摘头结构简图Fig.4 Structure diagram of the picking head
由图4可知,β与ɑ的关系为:

式中:p为振动频率,t为运行时间。
式(1)两端同时对时间求二次偏导可得导杆角加速度为:
故驱动导杆运动所需扭矩为:

由图4可知树干变形长度为:

由多次实地考察可知,挂果率较高的经济林树干直径范围为40~50mm,可简化为弹性系数k=5N/mm的弹簧模型。则树干变形产生的弹力及力矩为:

故马达所需提供的扭矩为:

式中:T为关于曲柄长度l、振动频率p、夹持距离R及运行时间t的四元函数。
对式(4)做降维处理,通过MATLAB软件可得马达扭矩T随l、R、p的变化曲面[11-17](图5)。
由图5可知,随着振幅和频率的增大,马达所需提供的扭矩逐渐增大;随着夹持长度增大,马达所需提供的扭矩减小。
因在同一状态下,振幅l增大(即力臂增大),马达需提供的力矩T应相应增大才能保证曲柄作用于导杆上的力不变;频率p增大,则导杆的角加速度增大,即T0增大,故马达所需提供的扭矩T也应相应增大;夹持长度R增大,则树干产生的力矩T1增大,故马达所需提供的扭矩T应减小。

图5 马达扭矩变化Fig.5 Variation of motor torque
3 采摘头动力选型
为满足采摘头在不同条件下工作,马达输出扭矩应大于采摘头所需提供的最大扭矩。故取曲柄长度25mm,振动频率10Hz,夹持长度160mm,代入式(4),得出马达扭矩变化曲线(图6)。

图6 马达扭矩变化Fig.6 Change of the torque from the motor
马达扭矩最大值为:
Tmax=47.0663N·m
查《机械设计手册》[15],选取液压马达型号为CM-C32C,输出转矩52.1Nm,输出转速1 800 r/min,满足使用要求。
4 结论
介绍了摆动式林果采摘头的工作原理及其结构设计,开展了动力学分析工作,揭示了采摘头工作时马达扭矩随曲柄长度、振动频率及夹持长度的变化规律,为采摘头动力学仿真结果验证提供了理论依据,并基于动力学分析结果对该采摘头进行了动力选型。
[1] 散鋆龙,牛长河,乔圆圆,等.林果机械化收获研究现状、进展与发展方向[J].新疆农业科学,2013,50(3):499-508.SAN Y L,NIU C H,QIAO Y Y,etal.Development of fruit mechanized harvest and its relevant research[J].Xinjiang Agricaltural Sciences,2013,50(3):499-508.(in Chinese)
[2] SANDERS K F.Orange harvesting systems review[J].Biosystems Engineering,2005,90(2):115-125.
[3] 刘红娟,刘君昂,郭亮,等.油茶林健康评价指标体系构建与初探[J].西北林学院学报,2010,25(4):67-71.LIU H J,LIU J A,GUO L,etal.Establishment of the index system in health assessment of camellia oleifera[J].Journal of Northwest Forestry University,2010,25(4):67-71.(in Chinese)
[4] 刘长林,张铁中,杨丽.果蔬采摘机器人研究进展[J].安徽农业科学,2008,36(13):5394-5397.LIU C L,ZHANG T Z,YANG L.Research progress on picking robot for fruits and vegetables[J].Journal of Anhui Agri.Sci.,2008,36(13):5394-5397.(in Chinese)
[5] 彭少波,周健,李立君,等.基于“PMAC”的采摘机器人的运动控制[J].农机化研究,2014(2):76-78,84.PENG S B,ZHOU J,LI L J,etal.Motion control of picking robot based on IMAC[J].Journal of Agricultural Mechanization Research,2014(2):76-78,84.(in Chinese)
[6] 张翔,李立君,易春峰,等.基于D-H法油茶果采摘机器人正运动学分析[J].农机化研究,2014(4):25-28.ZHANG X,LI L J,YI C F,etal.Forward kinematics analysis of the camellia oleifera picked robot based on the D-H method[J].Journal of Agricultural Mechanization Research,2014(4):25-28.(in Chinese)
[7] 高自成,李立君,刘银辉.油茶果采摘机采摘机械臂的机构设计及运动仿真[J].西北林学院学报,2012,27(2):266-268.GAO Z C,LI L J,LIU Y H.The Mechanism design and movement simulation for the mechanical arm of the oil-tea camellia fruit picking machine[J].Journal of Northwest Forestry University,2012,27(2):266-268.(in Chinese)
[8] 邸海燕,张庆功.摆动导杆机构运动特性的解析法研究[J].轻工机械,2009,27(2):56-59.DI H Y,ZHANG Q G.Analytic method research on K inetic characteristics of oscillating-guide-bar mechanism[J].Light Industry Machinery,2009,27(2):56-59.(in Chinese)
[9] 刘伟,陈会涛,牛永生.基于 MATLAB的摆动导杆机构仿真[J].中原工学院学报,2007,18(2):48-51.LIU W,CHEN H T,NIU Y S.Oscillatinguard bar mechanism on the MATLAB simulation[J].Journal of Zhongyuan University of Technology,2007,18(2):48-51.(in Chinese)
[10] 苏有良.偏置摆动导杆机构的解析设计与运动仿真[J].机械设计,2013,30(10):21-24.SU Y L.Bias swing guide rod institutions analytic design and motion sumulation[J].Journal of Machine Design,2013,30(10):21-24.
[11] 郭秀红.混合动力电动汽车发动机建模与 MATLAB仿真[J].中国农机化学报,2013(4):193-196.GUO X H.Hybrid electric vehicle engine modeling & MATLAB simulation[J].Chinese Journal of Agricultural Mechanization,2013(4):193-196.
[12] 邹丽梅.导杆机构的 MATLAB运动仿真[J].机械工程师,2008(4):32-34.ZOU L M.Kinematics simulation of guide rod mechanism on MATLAB[J].Journal of Mechanical Engineer,2008(4):32-34.(in Chinese)
[13] 许华杰,马训鸣,郭帆,等.基于 MATLAB和Pro/E摆动导杆机构运动学分析和仿真[J].机械工程师,2014(6):117-119.XU H J,MA X M,GUO F,etal.Kinematics analysis and simulation of oscillating grard bar mechanism based on MATLAB and Pro/E[J].Journal of Mechanical Engineer,2014(6):117-119.(in Chinese)
[14] 曲秀全,李洪波,孟庆鑫.7R六杆III级机构的MATLAB动力学仿真[J].哈尔滨工业大学学报,2006,38(10):1673-1676.QU X Q,LI H B,MENG Q X.Dynamic simulation of 7Rsix bar III degree of freedom mechanism with MATLAB[J].Journal of Harbin Institute of Technology,2006,38(10):1673-1676.(in Chinese)
[15] 徐灏.机械设计手册[M].北京:机械工业出版社,1991.
