基于模糊自适应PID控制的桥式起重机定位防摆研究
2014-12-31史良伟王占军
史良伟,李 虹,王占军
(太原科技大学 电子信息工程学院,山西 太原 030024)
0 引言
目前有关桥式起重机小车的定位和防摆控制方法很多,有 LQR 最优控制[1]、增益调节[2]、模糊控制[3]、自适应控制[4]、神经网络[5]等,但是在面对以精确数学模型为基础的具有高阶、非线性、大迟延、时变性等特点的系统时,上述控制显得有些不足,尤其体现在参数选取、消除稳态误差以及位移速度控制方面。本文针对起重机模型的非线性和时变性以及简单控制在桥式起重机定位和防摆中存在的不足,在分析了桥式起重机二维动力学模型的基础上,设计了一种基于模糊自适应PID控制的桥式起重机定位和防摆的方法,仿真结果表明了该方法在消除稳态误差以及参数控制等方面的可行性,且该方法具有较好的鲁棒性。
1 桥式起重机的物理模型
桥式起重机的定位防摆研究包括大车、小车两个方向上的位移控制和摆动控制,在进行装卸作业时,主要是小车在进行工作,大车通常处于静止状态,故建立力学模型时,可以暂时不考虑大车运动。桥式起重机系统动力学简化模型如图1所示。
设起重机小车质量为M、吊重质量为m,小车和吊重的坐标分别为(xM,yM),(xm,ym),重力加速度为g,小车车轮与轨道之间的摩擦系数为μ。整个系统受到的外力有驱动电机给予小车的驱动力F、起升机构给予吊重的拉力Fl、小车车轮与轨道之间的摩擦力f。建立直角坐标系,以小车受到的驱动力F的方向为x轴正向,小车重力的方向为y轴正向。桥式起重机最大起升高度为h,当绳长l为h时吊重的重力势能为零。选起重机小车位移x、绳长l、摆角θ这3个变量为系统的广义坐标,建立桥式起重机二维防摆系统模型。
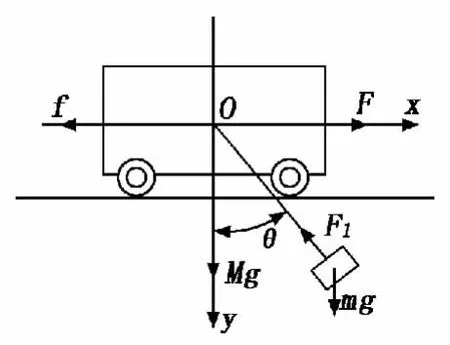
图1 桥式起重机系统动力学简化模型
根据Lagrange方程的定义公式,可得桥式起重机的非线性动力学微分方程:

实际使用时,在桥式起重机水平行走过程中,总是将提升电机制动,使绳长保持不变,当定位完成,并消除摆动时,再使用提升电机制动,将重物放到指定位置。所以假设绳长不变,即==0,则对式(1)进行简化并进行拉普拉斯变换得:

2 桥式起重机模糊自适应PID控制器设计
桥式起重机系统是一个多变量非线性系统,而且由于吊重变化或外界干扰等原因使系统具有时变性和不确定性,因此,现实中利用经典控制方法和普通的智能控制方法难以达到理想的控制效果。
本文使用2个模糊自适应PID控制器对小车的位移和吊重的摆角同时进行控制,通过找出偏差e和偏差变化率ec与PID控制器3个变量参数之间的模糊关系,再根据增量型参数调整原理,运用模糊控制技术来对3个参数进行在线修改以满足不同的偏差e和偏差变化率ec对控制参数的不同要求,从而使被控对象有良好的性能。桥式起重机防摆模糊自适应PID控制系统的结构框图如图2所示。模糊PID控制器参数推理部分的输入为偏差e和偏差变化率ec,量化因子分别为Ke和Kec;输出为位移PID控制器的参数Kp2,Ki2,Kd2。Kp1,Ki1,Kd1为整定常规 PID 位移控制器得到的参数,模糊控制器的输出为参数修正值ΔKp,ΔKi,ΔKd,因此,Kp2=Kp1+ΔKp,Ki2=Ki1+ΔKi,Kd2=Kd1+ΔKd。模糊自适应PID摆角控制器同理,其输出参数为Kp4,Ki4,Kd4。

图2 桥式起重机防摆模糊自适应PID控制系统结构框图
本文选取欧洲著名起重机制造商Konecranes集团生产的CXTD 16t×19.5m的双梁桥式起重机,部分参数如下:整机自重11.4t,起升电机15/2.5kW,小车自重1.46t,小车最大运行速度20m/min,小车电机0.43×2kW。
根据实际情况以及专家经验,我们可以设定桥式起重机位移偏差的基本论域为[-19 19](m),位移偏差变化率的基本论域为[-1/3 1/3](m/s),吊重摆角偏差的基本论域为[-0.5 0.5](rad),角度变化率的基本论域为[-1 1](rad/s);输出变量ΔKp,ΔKi,ΔKd的基本论域分别为[-3 3],[-0.5 0.5],[-0.5 0.5]。输入语言变量与输出语言变量的模糊论域均为[-3 3],且均有7个模糊子集{NL,NM,NS,ZO,PS,PM,PL},子集中的元素分别定义为{负大,负中,负小,零,正小,正中,正大},均采用以上所设计模糊控制器隶度函数来定义输入、输出变量。
选择适当的模糊化和去模糊化方法,根据模糊规则表1、表2、表3可以对ΔKp,ΔKi和ΔKd进行参数整定。模糊自适应PID摆角控制器同理。
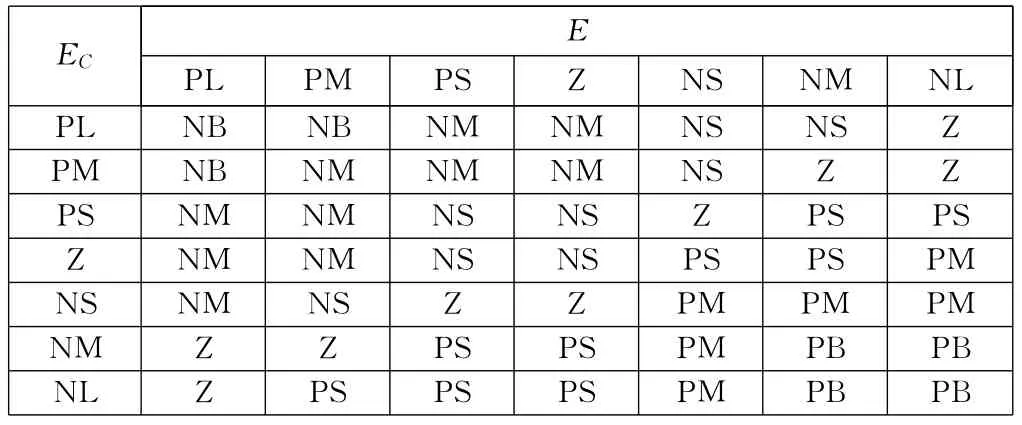
表1 ΔKp的模糊规则表
3 仿真结果
为了验证本文设计的桥式起重机模糊自适应PID控制器的可行性和有效性,本文进行了仿真研究。
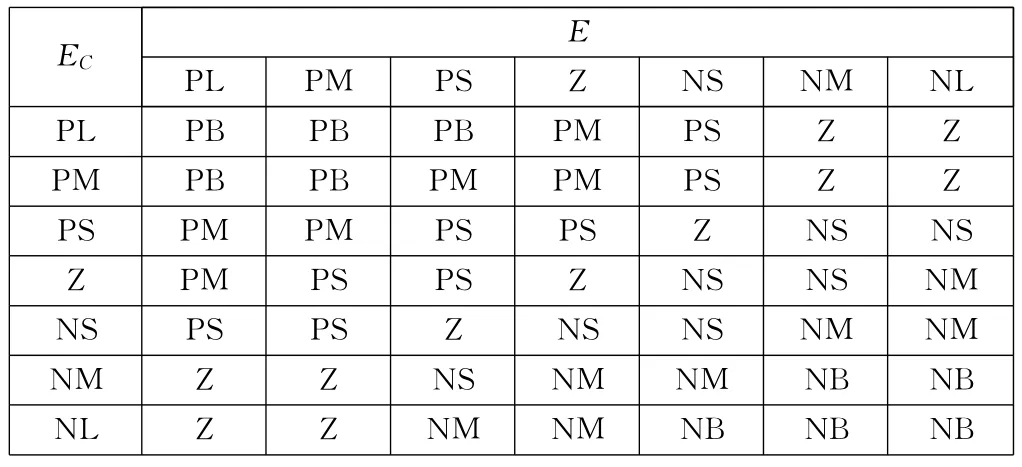
表2 ΔKi的模糊规则表

表3 ΔKd的模糊规则表
当桥式起重机小车目标位移为15m时(如图3所示),吊重分别为2t和15t的仿真结果如图4所示。

图3 目标位移15m时小车理想位移曲线
当小车目标位移为6m时(如图5所示),吊重分别为2t和15t的仿真结果如图6所示。

图4 目标位移为15m时的仿真结果
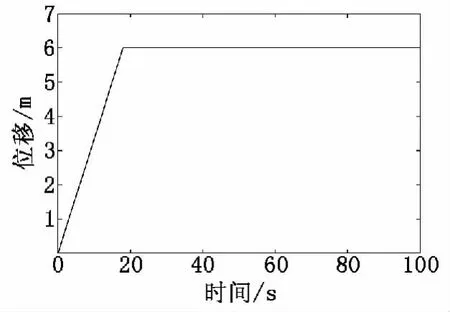
图5 目标位移6m时小车理想位移曲线
由图3~图6可知,当小车的位移发生变化、吊重重量发生变化时,小车的运行时间、摆角等各项参数相对来说变化不大,并且稳定用时较短,摆角较小,符合定位和防摆的要求,表明通过两个模糊自适应PID控制器的作用,起重机小车实现了对小车位移和吊重摆角的平滑控制;在桥式起重机的运行过程中小车速度一直在20m/min以内,没有超出桥式起重机的工作范围;当小车到达目标位置时,位移的误差在-0.01m~0m之间,精度符合要求,并且由于没有超调,使得起重机的安全性和工作效率大大增加。

图6 目标位移为6m时的仿真结果
4 结论
本文对桥式起重机的定位和防摆控制进行了研究,控制系统采用了两个模糊自适应PID控制器,分别对小车位置和吊重摆动进行控制。仿真结果表明该方法能够满足不同的偏差和偏差变化率对控制参数的不同要求,使被控对象具有良好的动静性能,达到了对位移和摆角进行控制的目的,从而证明模糊自适应PID控制方法的可行性、有效性及较好的鲁棒性,能够更好地应用于起重机的自动控制当中。
[1] 朱齐丹,华克强,高淑玲.吊车防摆最优调节器设计[J].控制与决策,1991,6(6):465-468.
[2] Corriga G,Giua A.An implicit gain-scheduling controller for cranes[J].IEEE Transaction on Control systems Technology,1998,6(1):15-20.
[3] 王晓军,邵惠鹤.基于模糊的桥式起重机的定位和防摆控制研究[J].系统仿真学报,2005,17(4):936-939.
[4] 华克强,高淑玲,朱齐丹.吊车防摆技术的研究[J].控制理论与应用,1992,9(6):631-637.
[5] 杨春燕.桥式起重机定位和防摆的RBF神经网络控制[J],中国科技论文在线,2011,6(4):320-324.
