半自动输弹机电机控制系统设计
2014-12-31薄玉成王惠源张鹏军郭立峰赵良伟
陆 明,薄玉成,王惠源,张鹏军,郭立峰,赵良伟
(1.中北大学 机电工程学院,山西 太原 030051;2.山西北方制造机械有限责任公司,山西 太原 030009)
1 问题的提出与分析
火炮炮弹在半自动输弹[1]时,由于输弹行程比较短,因此工作时间极短。当火炮需要打70°高角时,在炮弹与推弹臂分离时刻需要保证弹丸的初速度为5 m/s,在启动电机到炮弹与推弹臂分离时仅仅为140 ms左右[2,3]。采用普通PID对交流伺服电机进行控制很难实现,所以对输弹机的输出电机进行前馈补偿PID控制显得尤为重要,本文对其工作原理和输弹过程进行分析。
1.1 臂式输弹机工作原理
目前半自动输弹机的工作方式主要有两种:强制输弹与惯性输弹。本文中分析的半自动输弹机采用的是强制输弹与惯性输弹相结合的工作方式。
臂式输弹机的工作过程如图1所示:弹丸通过伺服电机驱动行星轮系,从而驱动摆臂推着弹丸运动,从图1(a)推弹起始位置,到图1(b)强制推弹结束位置,这一阶段为强制输弹过程;弹丸从图1(b)强制推弹结束位置到弹丸卡膛(惯性推弹结束)为惯性推弹过程,弹丸依靠自身的动能向前运动,直到卡膛为止。
1.2 臂式输弹机电机多环复合控制系统分析
伺服控制技术实质上是围绕以改善伺服驱动装置的静、动态特性来展开的[4]。控制系统分为三环控制,从外到内分别为位置环、速度环和电流环,该结构有一个严重的缺点,就是随着控制环数的增加,对于输入参考信号的响应也逐渐变慢。为克服控制系统响应缓慢的缺点,本文采用对内环引入前馈控制信号的方法来给予控制系统补偿,如图2所示。其中,θref为参考输入角度,ωref为参考输入角速度,Iref为参考输入电流,ω为速度传感器反馈速度信号,ω·为速度调节信号,ia为反馈电流信号。

图1 臂式输弹机工作过程

图2 采用补偿方法的输弹机多环控制结构图
2 模型仿真
运用前馈补偿PID控制算法,通过基于跟踪误差指标的最优控制理论[5],在装填角度为50°下建立输弹机推弹速度仿真控制模型,如图3所示。通过对模型进行速度仿真,得到速度仿真结果,如图4所示。
从图4中可以看出:在0.068s时,角速度ω达到峰值4 652r/min,稳定角速度在4 236r/min左右,最大超调量为416r/min,由于系统的工作时间小于0.2s,因此在如此短的时间内系统是无法达到最终的理想稳定效果。为保证系统的近似稳定,应使超调量近可能小,而振荡周期尽可能大,这样才能使速度曲线趋于平缓。
3 试验过程分析
3.1 初次试验问题分析
初次试验结果见图5。由图5可知,在推弹过程电机加速行程上,约在电机启动后50ms左右速度曲线有明显波动,这应该是由外界扰动引起的。通过激光位移传感器测得输弹机在推弹过程中垂直方向的位移波动数据,如图6所示。

图3 装填角度为50°推弹速度仿真器
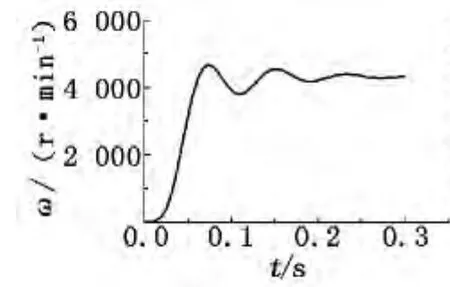
图4 速度仿真结果图

图5 初次试验速度曲线
这种垂直方向的波动原因是:由于系统为一个柔性推弹机构,启动时瞬间巨大的启动力矩导致架体产生纵向垂直波动。由于该波动无法避免,因此需要重新修改PID参数,主要是控制积分环节的Ti参数,以降低Ti参数来增强其抗干扰能力。
3.2 修改后试验结果分析
重新调整电机PID参数,在推弹机仿真器Simulink模型的积分环中,控制积分环节Ti小于0.004 3,将新参数应用到伺服电机上,得到成功推弹入膛的数据,如图7所示。与初次失败的速度曲线相比,伺服控制系统启动更加平稳,从而提高了卡弹精度和卡弹一致性,进而提高了射击精度。
4 结论
本文运用MATLAB/Simulink软件对输弹机电机控制系统进行仿真,得到仿真曲线。采用激光位移传感器测试推弹系统的振动特性,对比试验结果,发现外界垂直位移扰动对电机平稳性影响很大。运用基于跟踪误差指标的最优控制理论,重新调整PID参数,降低了外界扰动对输弹机电机系统的扰动,得到了较好的电机速度特性,成功地推弹入膛,并且结果一致性较好,具有很好的实践意义。

图6 垂直位移s波动曲线
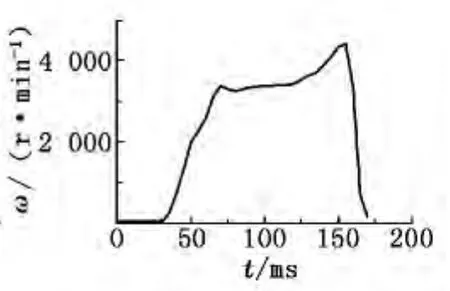
图7 调整PID参数后的速度试验曲线
[1]梁辉,马春茂,潘江峰,等.大口径火炮弹药自动装填系统研发现状和趋势[J].火炮发射与控制学报,2010(3):103-107.
[2]曲振森,薄玉成,王惠源,等.臂式输弹机的结构设计和仿真分析[J].火炮发射与控制学报,2012,3:64-67.
[3]曲振森,薄玉成,王惠源,等.臂式输弹机构特性研究[J].中北大学学报,2012(3):117-120.
[4]刘胜,彭侠夫,叶瑰昀.现代伺服系统设计[M].哈尔滨:哈尔滨工程大学出版社,2001.
[5]薛定宇.控制系统计算机辅助设计-MATLAB语言与应用[M].第2版.北京:清华大学出版社,2006.
