一种自动捡垃圾机器人的虚拟设计及运动分析❋
2014-12-31刘萍萍徐国耕
祁 振,刘萍萍,徐国耕
(1.南京化工职业技术学院机械技术系,江苏 南京 210048;2.徐工集团工程机械股份有限公司建设机械分公司,江苏 徐州 221001)
0 引言
随着人们生活水平的提高,排放的垃圾越来越多,很多城市都实行了垃圾分类投放,政府为此耗费的资金也颇为可观,但施行多年,垃圾分类投放效果并不显著,究其原因,很大程度上是因为人们不知道如何分类垃圾。本文基于SolidWorks进行了自动捡垃圾机器人的虚拟设计,旨在解决生活中垃圾分类和处理问题。
1 机器人主要零件的设计与装配
机器人外形机械结构以科幻电影《机器人瓦力》中的机器人为基础,共91个零部件,包括头部、身体架构、垃圾捡拾机构、垃圾压缩机构和行走机构。主要采用SolidWorks软件中特征建模和参数化建模方法进行各零部件的设计建模,采用自下而上和自上而下混合装配方式装配。机器人总装结构如图1所示。

图1 机器人总装图
2 机器人工作原理与运动分析
2.1 行走机构运动分析
考虑到工作环境,机器人需要适应多种路况。将机器人的行走机构设计成履带式,可以在家庭平地上走动,也可以在山路、工地上走动。行走机构由连杆、诱导轮、履刺、主动轮和从动轮组成,主动轮和从动轮各两对,安装宽度等于履刺宽度,其动力经连杆传到诱导轮,由诱导轮带动与之配合的主动轮,主动轮驱动履刺将运动传给从动轮,实现履带行走,如图2所示。
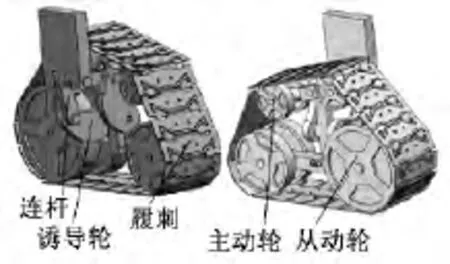
图2 行走机构
2.2 垃圾捡拾机构运动分析
垃圾捡拾机构主要是机器人手臂,包括伸缩手臂和夹持手指,如图3所示。伸缩手臂采用套杆结构实现长短伸缩,手臂与身体通过中间接头连接,如图4所示。手臂与中间接头的配合为球铰链,可实现手臂360°旋转,中间接头与身体的配合为滑块,接头在身体上开设的水平和垂直滑道内滑动,实现手臂前后、上下运动。手指与手臂的连接如图5所示,3个手指由销钉与连接块连接,实现手指张合夹持,手臂通过另一个销钉与连接块连接,实现腕关节180°内旋转。
2.3 垃圾压缩机构运动分析
垃圾压缩机构,即机器人身体部分,内部放置两个箱体,分别收集可回收和不可回收垃圾,通过手指和手臂的配合传动将垃圾送进指定的箱子,不可回收部分将进行压缩处理,如图6所示。压缩过程如下:动力通过液压杆将压板下压,压板压缩垃圾和装在底板下的涡卷弹簧,弹簧受力被压缩,当动力撤销后压板上升,底板受弹簧弹力作用将压缩后的垃圾顶出箱子,完成一次工作过程。
2.4 仿真验证
SolidWorks中的COSMOSmotion插件可进行机构运动仿真,来测量构件的位移、速度、加速度。本文选择复杂的机器人行走机构详细阐述运动仿真过程,垃圾捡拾机构和压缩机构类同处理。

图3 垃圾捡拾机构

图4 手臂与身体的连接

图5 手指与手臂的连接
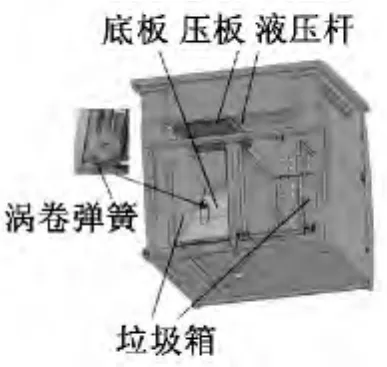
图6 垃圾压缩机构
2.4.1 约束映射
约束映射是指SolidWorks中两个零件之间的装配关系能自动地智能地转化为COSMOSmotion中最小的机构连接形式,用户可以不做另外更多的工作就能让机器运动起来。本文机器人行走机构中的装配关系除履刺外均为重合和同轴心配合关系,直接映射为连接,转化成移动副和旋转副。履刺在SolidWorks中的装配关系为高级配合里的“路径配合”,即在设计装配阶段采用自上而下的设计方法,用路径草图约束履刺装配,因为履刺为柔性体,所以在COSMOSmotion中不添加运动副,只保留配合关系。
2.4.2 驱动添加
将行走机构的驱动动力添加在诱导轮上,右击诱导轮的旋转运动副,选择【属性】,在出现的对话框中点击【运动】标签,设置【运动作用在】为【绕Z轴旋转】,选择“位移”运动类型,将运动函数设置成恒定值,角位移设置为90°,这样就在诱导轮的旋转运动副上创建了一个角位移为90°的驱动,诱导轮成为原动件。
2.4.3 仿真结果
点击COSMOSmotion工具栏的仿真设置,点击【仿真】进行仿真,选择装配树中从动轮零件,右击绘制从动轮位移、速度和加速度随时间变化的曲线,如图7所示。由图7(a)可以看出,在设定的仿真时间内从动轮的运动是连续的。
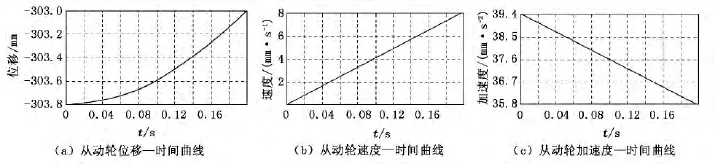
图7 行走机构仿真结果
3 结论
本文基于SolidWorks软件设计了一种能自动捡拾垃圾,将垃圾按可回收和不可回收进行分类,对不可回收垃圾进行压缩处理的机器人。设计了其机械结构部分,对机器人行走、捡拾垃圾和压缩垃圾过程进行了运动分析,对运动机构进行了仿真验证,从运动学角度保证了垃圾捡拾机器人机械结构设计的合理性和可靠性。
[1]江洪.SolidWorks动画演示与运动分析实例解析[M].北京:机械工业出版社,2006.
[2]赵学科,宋立权,李智成.基于Pro/E Mechanism的旋叶式压缩机运动仿真[J].压缩机技术,2011(1):1-3.
[3]路连,高荣.基于UG的电动自行车虚拟装配与运动学分析[J].机械设计与制造,2011(11):259-260.
[4]龚晓燕,居志兰,陈厚军.基于Pro/E香皂冷打印机构的虚拟设计与运动分析[J].机械设计与制造,2011(8):37-39.
[5]刘萍萍,钱丹浩.基于COSMOSmotion的液压挖掘机工作装置参数化建模及运动仿真[J].现代机械,2009(6):14-15.