组网火控雷达传感器分配研究*
2014-12-31尚朝轩韩壮志
罗 浩,尚朝轩,韩壮志,肖 强
(军械工程学院电子与光学工程系,河北石家庄 050003)
0 引言
火控雷达主要作战目的在于探测跟踪目标,为火力系统提供准确的目标位置,组网使得系统内各传感器协同跟踪、数据融合、信息共享,把航迹精度作为组网火控雷达传感器分配管理准则是合理的。传感器管理定义为,利用已有的传感器资源,满足对目标和扫描空间的需求,以获得各个具体特性的最优值(如检测概率、截获概率、传感器自身的发射能力、航迹精度或丢失概率等),并以这个最优准则对传感器资源进行合理科学的分配[1]。
传感器管理涉及到的领域很广,其主要包括:规划论、信息论、人工神经网络、信号处理以及专家系统等。主要的方法有:基于滤波技术和协方差控制的方法[2];基于数学规划和智能优化技术的方法[3];基于信息论的方法[4]。
影响雷达传感器分配的因素有很多,本文主要针对提高跟踪精度和反隐身目标、低空目标的需求,考虑雷达布站对防空覆盖区域划分,研究了基于扩展卡尔曼滤波的航迹精度为准则的传感器分配,提出了3种火控雷达传感器分配方式,分别给出在3种方案下选择火控雷达分配方案的方法,并进行了仿真验证。
1 融合航迹精度
本文采取基于扩展卡尔曼滤波和融合航迹精度确定传感器分配的方法,下面先给出扩展卡尔曼滤波过程和航迹精度的计算过程。
1.1 扩展卡尔曼滤波过程
火控雷达si的状态方程和测量方程


式中 F(k)为状态转移矩阵,X(k)为状态向量,G(k)为输入控制项矩阵,u(k)为控制信号,V(k)为过程噪声,Z(i)(k)为量测值,h(i)(k,X(k))为量测矩阵,W(i)(k)为测量噪声。
一步目标的状态和测量值预测值

新息为

状态和新息的预测协方差为
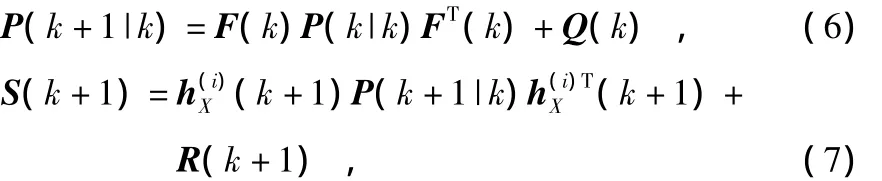
增益为

状态和协方差更新方程为

1.2 航迹精度求解
在融合中心进行融合时,根据文献[5],本文采用简单协方差凸组合(convariance convex,CC)算法,该算法假设对同一目标的各个火控雷达局部状态估计误差统计独立,并通过扩展卡尔曼滤波得到全局状态估计,融合算法如下

式中m为系统拥有雷达数量,M为参与融合的雷达数量,(k|k),P(k|k)为融合后的目标状态估计值及其误差协方差矩阵。
在作战过程中,为了火力系统能够准确命中目标,引入航迹精度Φ来评估系统的跟踪性能并作为火控雷达分配的依据。为满足火力系统命中目标的精度需求确定航迹精度的最低标准Φ0,tk时刻火控雷达的融合航迹精度为Φ(k),则有

在系统进行火控雷达传感器分配时,若融合航迹精度Φ(k)满足Φ(k)<Φ0,则表示目标跟踪精度满足相关武器系统的要求,可作为合理的分配方案;反之,若融合跟踪精度Φ(k)满足Φ(k)>Φ0,则跟踪精度不能满足系统的最低要求,此分配方案不可取。
2 火控雷达目标分配方式
文献[1]提出数据融合闭环控制模式,如图1。其中各个传感器子系统将目标信息汇总到数据融合子系统处,融合中心处理数据,共享数据给整个系统,由决策支持子系统和传感器管理子系统完成传感器的分配。
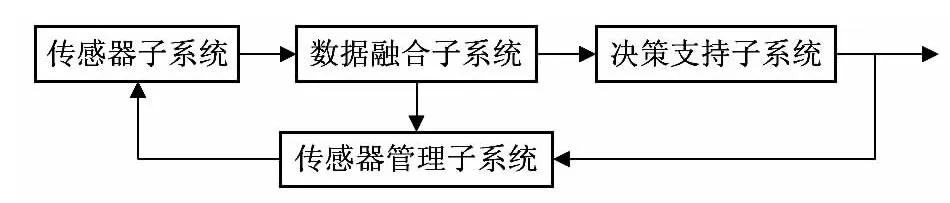
图1 数据融合闭环控制模式Fig 1 Data fusion closed-loop control mode
采用单脉冲技术的火控雷达是一种精密测量跟踪雷达,通常只能对单个目标进行跟踪测量。这样造成有别于其他雷达传感器分配,本文把火控雷达传感器分配分为3种方式:单部火控雷达对单目标进行跟踪;多部火控雷达对单目标进行跟踪;多部火控雷达对单目标间歇式轮换跟踪。
为了后面表述简明,假定战场中目标集合C={c1,c2,…,cn},火控雷达集合S={s1,s2,…,sm}。可选的目标分配方案集合B={b1,b2,…,bl},l表示有l种可选方案。方案b={si,sj,…,sk}表示使用{si,sj,…,sk}火控雷达组合对目标进行跟踪测量。
2.1 单部火控雷达对单目标进行跟踪
扩大防空区域是雷达组网目的之一,科学的布站必然会造成覆盖区域的划分,覆盖区域一般可以划分为:单雷达覆盖区域、部分雷达覆盖区域和所有雷达覆盖区域,尽量把重点保护对象部署在所有雷达覆盖区域。
很多雷达网传感器分配研究仅考虑基于探测概率最大[6]或滤波误差最小[7]进行的,本文考虑了雷达布站确定之后的作用区域划分的限制,这样更加合理。单部雷达对单目标跟踪情况要分为2种。
一种情形是目标处于单雷达覆盖区域,这样只能分配覆盖该区域的单部雷达进行跟踪。
另一种情形是目标c进入多部火控雷达S={s1,s2,…,sM}覆盖区域,要分配某一部火控雷达对目标进行跟踪。用火控雷达集合S={s1,s2,…,sM}中每部火控雷达对目标c进行跟踪滤波并计算精度,分别得到当前时刻的M个航迹精度值:Φ1(k),Φ2(k),…,ΦM(k),如果 Φj(k)=min{Φ1(k),Φ2(k),…,ΦM(k)},表示应该分配使用火控雷达sj对目标c进行跟踪,这样跟踪性能最好。
2.2 多部火控雷达对单目标进行跟踪
多部火控雷达同时对单个目标进行跟踪,融合中心综合处理各个火控雷达传来的目标信息,不仅能提高对目标的跟踪精度,还可达到对抗隐身目标和低空、超低空目标的效果[8]。
设目标c进入多部火控雷达S={s1,s2,…,sM}覆盖区域,进行火控雷达目标分配,确定多部火控雷达对目标进行跟踪。为了描述问题简明,假设提供选择的方案有2种B={b1,b2},其中,b1={si1,sj1,…,sk1},b2={si2,sj2,…,sk2}。
使用方案b1时,使用si1,sj1,…,sk1火控雷达分别对目标c进行跟踪测量产生局部目标状态估计及其误差协方差矩阵,在融合中心利用CC算法计算得到Pb1(k|k)协方差矩阵,再算得融合后航迹精度Φb1(k)。
使用方案b2时,同样的方法求得融合后航迹精度Φn2(k)。
如果Φb1(k)≤Φb2(k),说明方案b1优于方案b2,应该选择方案b1,否则,选择方案b2。
2.3 多部火控雷达对单目标间歇式轮换跟踪
火控雷达由于其工作特点和任务需要,辐射功率大并持续照射目标,极容易受到反辐射导弹(anti radar missile,ARM)的攻击,基于对抗 ARM,文献[9,10]提出了组网雷达特有的工作模式:间歇式轮换工作。因此,把间歇式轮换工作方式作为一种有效传感器管理可选方式,在保证完成火控雷达网跟踪目标的前提下,又能对抗ARM提高火控雷达网的生存能力。
间歇式轮换工作是指组网系统内多部火控雷达分时工作,目标数据共享,共同完成对目标探测跟踪。传感器管理子系统控制火控雷达轮换工作,某一时刻仅有一部雷达工作,其他雷达则处于间歇状态。处于工作状态的单部雷达对目标进行跟踪,并将目标数据传送给融合子系统。同时,处于间歇状态的火控雷达并不是完全关机,而是不断从数据融合子系统获取目标信息,利用得到目标信息实现被动跟踪,这样才能保证在工作状态发生交替时,能够快速准确地跟踪目标。间歇式轮换工作方式,需要考虑2个问题:一是参与轮换工作火控雷达数量的确定;二是每部火控雷达一次辐射工作时间长度的确定或者说各雷达交替工作的时机的确定。
间歇式轮换工作的组网火控雷达相当于一部雷达随机变换工作参数和工作地点,这样造成空间复杂的电磁环境,导致ARM难以找到火控雷达,不能进行有效的攻击。因此,采用间歇式轮换工作时,应该协调尽可能多的火控雷达参与轮换工作。
要确定每部火控雷达一次辐射工作时间长度或者各雷达交替工作的时机,融合控制系统必须确定需要航迹精度的最低标准Φ0和每部雷达单次工作最长时间T0。假定t时刻,火控雷达si对目标进行跟踪,跟踪精度为 Φi。若Φi<Φ0,满足精度需求,火控雷达si跟踪目标,其他雷达处于被动跟踪状态,雷达si一直满足精度需求,但当时间达到t+T0时刻,用下一部火控雷达si+1接替si工作;若Φi>Φ0,雷达si不能满足精度需求,火控雷达si+1接替si工作。
3 仿真实验
3.1 仿真情景与参数
假定战场情景是,3部火控雷达s1,s2,s3分别部署于O1(0,20),O2(-30,- 1 0),O3(30,- 10),成边长为60 km等边三角形分布,整个覆盖区域划分为α1,α2,α3,β1,β2,β3,γ 共7 部分,如图 2,有一个目标c进入火控雷达网覆盖区域。

图2 雷达网部署Fig 2 Deployment of radars network
根据文献[11],假定3部雷达跟踪距离都为60 km;雷达s1的距离测量误差为10m,角度测量误差为0.1mrad;雷达s2的距离测量误差为30m,角度测量误差1.6mrad;雷达s3的距离测量误差为60 m,角度测量误差为3.2 mrad。
以3部雷分布中心为原点,正南为x轴、正东为y轴、垂直线为z轴建立直角坐标系。目标c初始位置为

运动方程为

3.2 仿真结果
1)单部火控雷达对单目标进行跟踪
第一种情形,目标c进入单雷达覆盖区域,只能分配覆盖该区域的单部雷达进行跟踪,如表1。
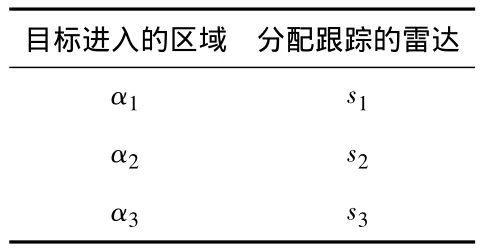
表1 目标处于单雷达覆盖区域分配情况Tab 1 Assignment of target in single radar coverage area
另一种情形是,目标c进入多雷达覆盖区域。假设目标c进入区域β1,依据雷达s1与s2跟踪航迹和精度对比如图3,s1航迹精度优于s2,故选择火控雷达s1对目标进行跟踪。
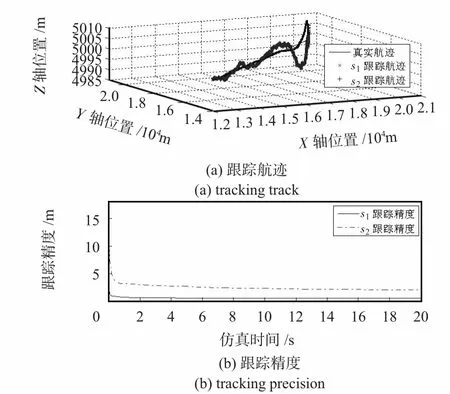
图3 雷达s1与s2跟踪航迹和精度对比Fig 3 Track and precision comparison of radar s1and s2
2)多个火控雷达对单目标进行跟踪
假定目标c进入区域γ,假设可供选择的有2种选择方案B={b1,b2},其中b1={s1,s2},b2={s2,s3}。依据雷达s1s2融合与s2s3融合跟踪航迹和精度对比如图4,方案b1航迹精度优于b2,故选择方案b1={s1,s2}对目标进行跟踪。
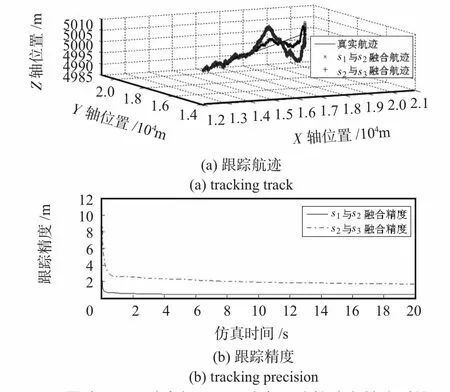
图4 雷达s1,s2融合与s2,s3融合跟踪航迹和精度对比Fig 4 Track and precision comparison of radars s1,s2 fusion and radars s2,s3fusion
3)多部火控雷达对单目标间歇式轮换跟踪
假定目标c进入区域γ,采用间歇式轮换工作方式。假设火控雷达s1s2s3都参与工作,时刻t0=0s雷达s1工作,固定轮换时间为T=5 s,则融合跟踪航迹与精度如图5。
4 结束语
本文以扩展卡尔曼滤波的航迹精度为准则进行组网火控雷达传感器分配。针对提高航迹精度、反隐身目标和低空目标等火控雷达作战任务需求,考虑雷达布站对防空覆盖区域划分和对抗ARM,提出了单部火控雷达对单目标进行跟踪、多部火控雷达对单目标进行跟踪和多部火控雷达对单目标间歇式轮换跟踪3种分配方式,并讨论研究了不同方式下雷达分配的方法。通过假定战场情景和典型参数进行了仿真实验,验证了组网火控雷达网3种传感器分配方式的合理性和可行性,对研究组网火控雷达的传感器分配有一定的参考价值。
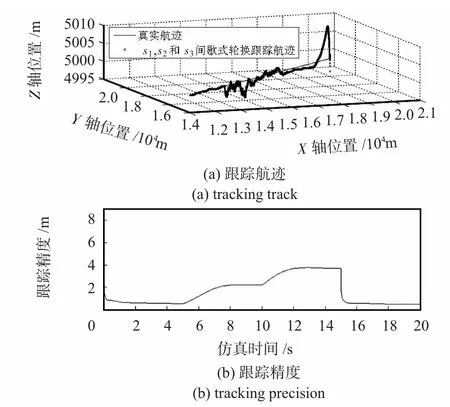
图5 雷达s1,s2,s3间歇式轮换跟踪Fig 5 Radars s1,s2,s3intermittent rotation tracking
[1]刘先省,申石磊,潘 泉.传感器管理及方法综述[J].电子学报,2002,30(3):394-398.
[2]卢建斌,胡卫东,郁文贤.基于协方差控制的相控阵雷达资源管理算法[J].电子学报,2007,35(3):402-408.
[3]刘先省,乔东杰,潘 泉,等.基于线性规划的传感器管理算法的研究[J].河南大学学报:自然科学版,1999,29(4):7-12.
[4]刘先省,申石磊,潘 泉,等.基于信息熵的一种传感器管理算法[J].电子学报,2000,28(9):39-41.
[5]乔向东,李 涛.多传感器航迹融合综述[J].系统工程与电子技术,2009,31(2):245-250.
[6]胡方方,张金成,李秋江.一种雷达网目标分配的数学模型研究[J].弹箭与制导学报,2006,26(2):1245-1252.
[7]王航宇,李 鹏,张 泉.多平台协同跟踪中的传感器分配方法研究[J].电子科技大学学报,2008,37(1):74-76.
[8]何 友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2006.
[9]陈永光,李修和,沈 阳.组网雷达作战能力分析与评估[M].北京:国防工业出版社,2006.
[10]徐 宏,韩壮志,何 强,等.火控雷达间歇辐射模型及其低截获性研究[J].现代雷达,2011,33(1):8-11.
[11]王德纯,丁家会,程望东,等.精密跟踪测量雷达技术[M].北京:电子工业出版社,2006.
