一种用于机载导弹动基座传递对准精度分析的工程方法
2014-12-31韩鹏鑫穆荣军崔乃刚
韩鹏鑫,穆荣军,崔乃刚
(哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150001)
0 引言
机载武器系统中,弹载子惯导安装误差和相对机载主惯导的姿态误差对发射时刻弹载子惯导的导航解算误差影响较大[1]。动基座传递对准的目的是对子惯导的安装误差和姿态误差进行准确的标定与修正,并向子惯导提供准确的速度和位置信息,保证在发射后的导航过程中,子惯导具有正确的导航解算初始条件。
子惯导的初始姿态误差与安装误差相关,通过补偿安装误差可对子惯导的初始姿态误差进行修正。由于子惯导的安装误差在实际试验过程中一般为常值,由初始安装条件决定。通过比较实际标定的安装误差与传递对准算法算得的安装误差可判定传递对准算法的正确性和有效性。但初始安装误差的标定须采用光电经纬仪、陀螺寻北仪等高精度实验设备,一般试验条件下,不具备标定所需的硬件设备[2]。由于不能精确标定安装误差,前期研究中多通过重复性检验的方法验证算法的正确性[2-3]。本文对一种通过子惯导重新导航解算对传递对准试验结果进行精度分析的工程方法进行了研究[4-6]。
1 安装误差角补偿
在机载武器系统中,载机本体系Oa-XaYaZa和导弹的本体坐标系Ob-XbYbZb定义分别如图1、2所示。

图1 载机本体系Fig.1 Body coordinate of plane

图2 导弹本体系Fig.2 Body coordinate of missile
在传递对准过程中,一般认为机载主惯导的敏感轴与机体系三坐标轴重合,子惯导的敏感轴与弹体系的坐标轴重合,且机载主惯导完全准确。因存在设备加工及安装误差,机载主惯导和弹载子惯导的敏感轴并非完全平行,存在一定的安装误差角φa。记φa=[φaxφayφaz]T,表示机体系绕三坐标轴须分别调整φax,φay,φaz后才能与弹体系对应坐标轴平行,即主子惯导系统的敏感轴互相平行。因此在传递对准过程中估算出子惯导相对机体的φa后,可通过式(1)求得子惯导的姿态矩阵,即弹体相对标准导航坐标系的真实姿态转换矩阵

式中:上下标a,n,b分别表示载机本体系、导航系和导弹本体系为由载机姿态信息描述的导航系至载机本体系的姿态转换矩阵;为子惯导(导弹)的姿态转换矩阵;为导弹的安装误差矩阵,由弹载子惯导的安装误差角确定[7-8]。有

式中:I为三阶单位阵;上标“×”表示反对称矩阵,有
式(1)中,的各分量由机载主惯导输出的姿态信息确定,由传递对准算法所得的φa确定。根据式(1),由提取的姿态角信息,可得子惯导相对标准导航坐标系的真实姿态信息,实现对子惯导安装误差角的补偿。
2 基于重导航法的对准精度分析
在动基座传递对准试验中,为衡量对准算法的正确性,须分析传递对准精度。在试验条件允许时,通过比较对准算法得到的安装误差角估值和实际设备标定的安装误差角,可直观地衡量对准精度;反之,则不能得到安装误差角的真实标定值。为衡量对准精度和算法的性能,采用一种工程上易于实现的重导航法进行精度分析,具体步骤如下。
a)主子惯导进行导航解算和传递对准
因未进行试验标定和传递对准误差补偿,认为主子惯导系统的导航初始条件相同。利用两套导航系统的解算结果,结合相关算法可进行动基座传递对准,以估算子惯导的φa。
设传递对准过程中,主惯导解算出的位置、速度、姿态分别为rm,vm,Am,子惯导解算出的位置、速度、姿态分别为rs,vs,As,则安装误差角修正前子惯导的导航误差为
b)安装误差角补偿
基于传递对准及主子惯导的解算结果,用式(1)补偿安装误差角,获得在子惯导开始解算时刻(传递对准开始时刻)修整后的子惯导姿态信息。
c)子惯导进行重新导航解算
在传递对准对应的时间段内,重新解算子惯导的导航。期间,子惯导的初始位置和速度仍采用主惯导的初始值,子惯导的初始姿态采用安装角误差补偿后的姿态信息。
设安装误差角补偿后,子惯导重新导航得到的位置、速度、姿态分别为rs1,Vs1,As1,则子惯导重新导航的导航误差为


d)精度分析
在传递对准对应的时间段内,通过比较初始值修正前后子惯导的位置和速度误差特性,可对传递对准算法的性能及对准精度进行分析和判定。
采用重导航法进行精度分析的要点是:根据对准算法得到的安装误差角的稳定值,对传递对准开始时刻子惯导的初始导航姿态进行修正,并以修正后的参数为初值,在传递对准所经历的时间段内重新进行子惯导的导航解算。根据传递对准的基本原理和目的,若对准算法有效,则经重导航后子惯导的位置和速度误差会有较大幅度的改善(特别是东向和北向,而天向估计结果一般是发散的)。因为无安装误差角的标定值,子惯导的姿态误差不能作为衡量对准性能的定量指标,但重新导航后的姿态误差能很大程度体现相应安装误差角的影响。
3 算例
在某次传递对准挂飞试验中,由于设备有限,无法准确标定子惯导的安装误差角,现以试验中得到的三组试验数据为初始条件,分析传递对准精度。在分析子惯导的导航误差时,以机载主惯导的导航输出作为参考轨迹。子惯导的陀螺常值漂移0.1(°)/h,加速度计常值漂移10-4g,主子惯导的数据更新周期均为0.01s。
试验在北天东地球固联坐标系中进行,采用“速度+姿态”的传递对准匹配模式。三组试验数据的传递对准及重导航验证的结果如下,其中“实际解算”和“重新导航”分别为安装误差修正前后子惯导的导航结果。
a)第一组试验数据
传递对准的安装角估计结果如图3所示,进行重新导航前后,子惯导的导航误差如图4~6所示。
b)第二组试验数据
传递对准的安装角估计结果如图7所示,进行重新导航前后,子惯导的导航误差如图8~10所示。
c)第三组试验数据
传递对准的安装角估计结果如图11所示,进行重新导航前后,子惯导的导航误差如图12~14所示。
三组试验数据的处理结果见表1、2。

图3 安装角估计结果(试验1)Fig.3 Result of misalignment established angles(test 1)
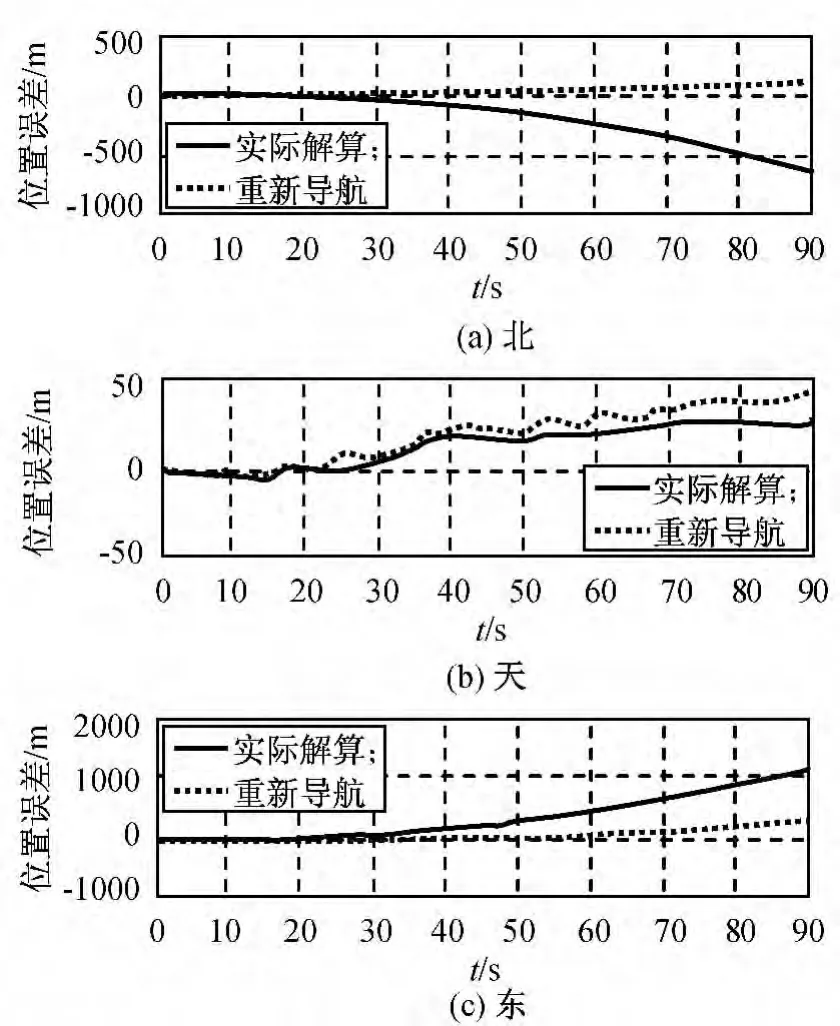
图4 子惯导位置误差(试验1)Fig.4 Sub SINS position errors(test 1)

表1 三组数据的传递对准结果Tab.1 Transfer alignment results

图5 子惯导速度误差(试验1)Fig.5 Sub SINS velocity errors(test 1)
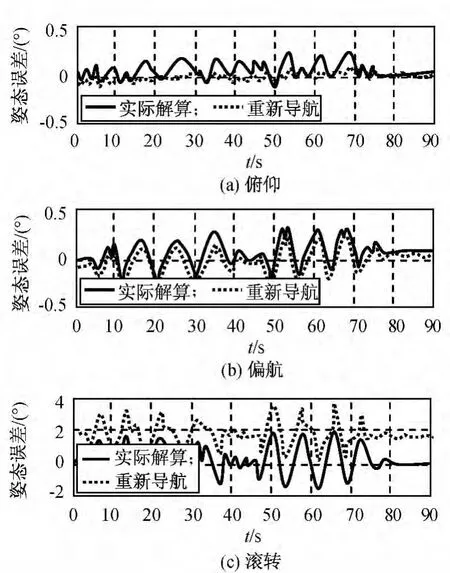
图6 子惯导姿态误差(试验1)Fig.6 Sub SINS attitude errors(test 1)
由仿真结果可知:对安装误差角进行修正后,速度和位置误差有较大幅度的改善。同时,子惯导相对主惯导的姿态误差很大程度体现了安装误差角的影响。如第一组数据,由于X向存在约110′的安装误差,导致子惯导相对主惯导产生近2°的滚转角误差,与实际物理意义相吻合。

图7 安装角估计结果(试验2)Fig.7 Result of misalignment established angles(test 2)

图8 子惯导位置误差(试验2)Fig.8 Sub SINS position errors(test 2)
上述三组试验数据的计算结果表明:采用对准算法估得的安装角误差对子惯导解算的初始姿态进行校正,并重新进行子惯导的导航解算,所得速度和位置精度大幅提高;同时,重新导航得到的位置和速度误差与子惯导的设备误差漂移特性相一致;重新导航得到的姿态误差与对准算法估计出的子惯导安装误差相一致。传递对准模型和算法是准确可行的,对准的结果合理、可信。

表2 对准结束时刻三组数据导航误差Tab.2 Navigation errors after transfer alignment

图9 子惯导速度误差(试验2)Fig.9 Sub SINS velocity errors(test 2)
4 结束语
本文在推导了动基座传递对准安装误差角补偿算法的基础上,针对缺乏标定设备的试验条件,提出了采用子惯导初值修正后重新导航的方式进行传递对准精度分析的方法。在北天东地球固联坐标系中进行三组试验比较导航误差,结果表明:该精度分析方法能有效地衡量传递对准的精度,具有一定的工程应用价值。

图10 子惯导姿态误差(试验2)Fig.10 Sub SINS attitude errors(test 2)

图11 安装角估计结果(试验3)Fig.11 Result of misalignment established angles(test 3)

图12 子惯导位置误差(试验3)Fig.12 Sub SINS position errors(test 3)

图13 子惯导速度误差(试验3)Fig.13 Sub SINS velocity errors(test 3)
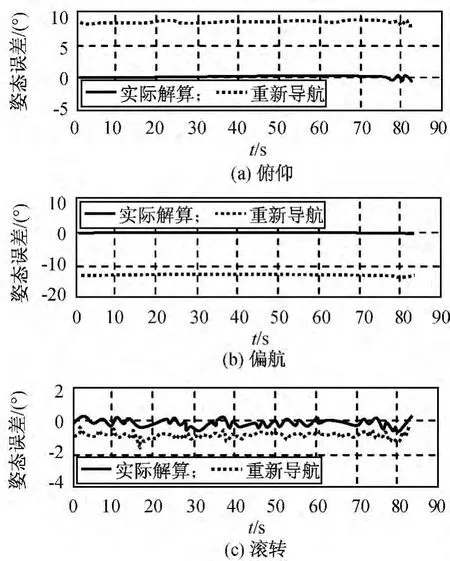
图14 子惯导姿态误差(试验3)Fig.14 Sub SINS attitude errors(test 3)
[1] 杨 波,秦永元.基于弹载IMU/GPS组合导航系统的动基座对准研究与仿真[J].计算机测量与控制,2006,14(4):505-507.
[2] 万德钧,房建成.惯性导航初始对准[M].南京:东南大学出版社,1998:37-46.
[3] 袁 信,俞济祥,陈 哲.导航系统[M].北京:航空工业出版社,1993.
[4] 邓正隆.惯性导航原理[M].哈尔滨:哈尔滨工业大学出版社,1994.
[5] 温永智,吴 杰,郑 伟.车载试验辨识SINS工具误差系数方法研究[J].弹箭与制导学报,2007,27(5):471-671.
[6] 郑建飞,胡昌华,张 伟.非全姿态惯性平台射前速率自标定技术研究[J].弹箭与制导学报,2007,27(3):623-823.
[7] 穆荣军,韩鹏鑫,崔乃刚.星光导航原理及捷联惯导/星光组合导航方法研究[J].南京理工大学学报,2007,31(5):585-589.
[8] DAVID H T,JOHN L W.Strapdown inertial navigation technology[M].Stevenge:The Institution of Electrical Engineers,2004:25.
