航天器爪型对接机构对接过程动力学仿真分析
2014-12-28
(北京空间飞行器总体设计部,北京 100094)
1 引言
空间对接机构是对接任务的重要部分[1],随着小型探测器、卫星等无人航天器的对接需求日益增加,小型对接机构日益受到关注,爪型对接机构属于小型航天器无人自主对接机构,具有机构简单、设计紧凑、自适应能力强、小型化、轻量化等优点,是我国未来无人空间任务对接机构的重要发展方向。
国内对小型航天器对接机构的研究相比国外较晚,曲广吉,于伟、杨芳等主要研究了异体周边式与中心式对接机构[2-7],研究成果并不适用于爪型对接机构,对爪型对接机构的动力学作用机理及对接表现并未涉及。类似爪型对接机构应用于美国的“轨道快车”(Orbital Express)计划[8-11],但是公开发表的文章中也未见其动力学仿真分析的相关文章。由于爪型对接机构构型与杆锥式、周边式对接机构完全不同,对接过程也必然有差异,必须研究其对接过程位姿表现及力学机理、确定影响因素。同时,受到地面模拟空间环境试验方法的限制,难以充分有效地开展对接机构的地面试验研究。因此,仿真模拟成为对接机构对接过程动力学研究的主要手段。
为了掌握新型爪型对接机构对接过程位姿表现及力学机理、确定影响因素,本文利用Adams建立了考虑对接过程中的接触、摩擦及碰撞等非线性因素的对接机构动力学模型,对对接过程进行仿真,分析捕获手抓捕力、捕获手摩擦力、缓冲器弹簧力、丝杠驱动电机力的变化与对对接过程的影响,对对接过程进行了详细阶段划分,并且从能量角度进行了缓冲器性能研究,可用于爪型对接机构的进一步优化设计与研究。
2 爪型对接机构组成及工作原理
2.1 爪型对接机构组成
爪型对接机构主要由主动部分和被动部分组成,二者分别安装于主动航天器和被动航天器上,对接机构的构成如图1所示(下文所述“对接机构”均指爪型对接机构)。其中,对接机构主动部分包括捕获手、驱动传动部件、缓冲器、主体结构;被动部分属于配合捕获定位的瓣壳体结构件。
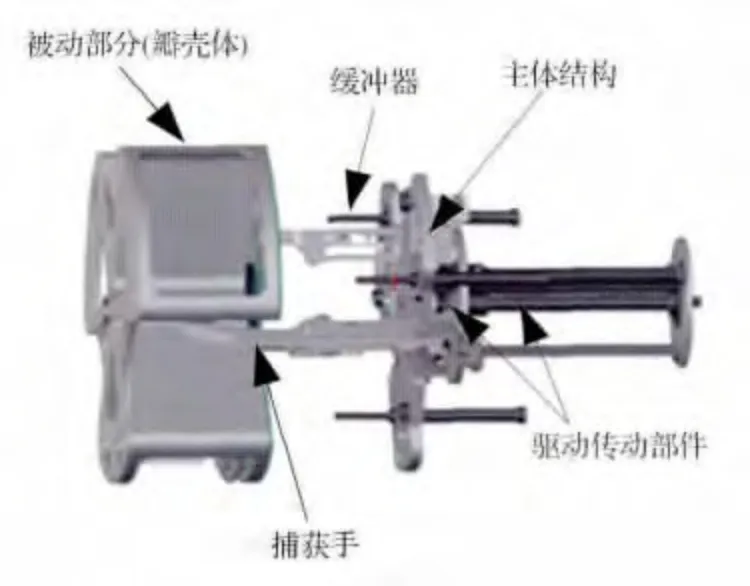
图1 爪型对接机构Fig.1 Claw-type docking mechanism
2.2 爪型对接机构工作原理
1)捕获手伸出打航天器开准备对接
捕获手在初始状态下收拢于主体结构内,接到指令后,捕获手通过驱动传动部件作用,在主体结构内由下向上平动伸出,捕获手关节扭簧解除约束,在扭簧作用下捕获手张开,其打开状态如图2(a)所示。
2)捕获手捕获瓣壳体实现软连接
当对接机构接到捕获指令后,捕获手迅速收拢。捕获手在收拢过程中先抱紧瓣壳,利用捕获手调整主、被动机构(航天器)相对位姿关系,形成初步位置对准,如图2(b)所示。
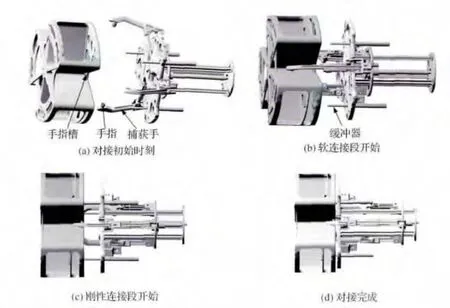
图2 对接过程阶段划分Fig.2 Phases of docking process
3)捕获手收回,主、被动部分形成刚性连接。
在捕获完成后,通过收回捕获手将两航天器相互拉紧,过程中进一步校正位姿偏差,捕获手收回至主体结构内,瓣壳体开始压缩缓冲器,如图2(c)所示,捕获手持续拉紧形成连接预紧力,最终完成对接,如图2(d)所示。
为便于分析,将对接过程相应划分为3个主要阶段:初始捕获段、软连接段、刚性连接段,分别对应图2中的(a)到(b)、(b)到(c)、(c)到(d)过程。定义捕获手完成合拢时,为软连接段的起始时刻,对应图2(b);捕获手拉至瓣壳手指槽,并且与缓冲器配合对瓣壳形成运动约束时为刚性连接段的起始时刻,对应图2(c)。
3 对接过程仿真分析
3.1 虚拟样机的建立
对接机构的仿真,首先要建立符合几何特征、对接原理的几何模型,然后将建好的三维模型导入Adams仿真平台,添加约束条件,建立反映对接机构接触、摩擦等非线性特性的动力学模型[12-14],对接机构虚拟样机模型如图3所示。
捕获手与瓣壳之间添加接触约束(Contact),根据材料特性修改参数并添加摩擦。缓冲器与瓣壳在对接过程中会发生接触碰撞,添加接触约束(Contact),Adams中采用的接触动力学模型为Hertz冲击函数模型[12,15]:

式中:F为法向接触力;K为接触刚度系数;C为阻尼系数;δ、分别表示接触法向嵌入量和穿透速度;e为刚度项的贡献因子。
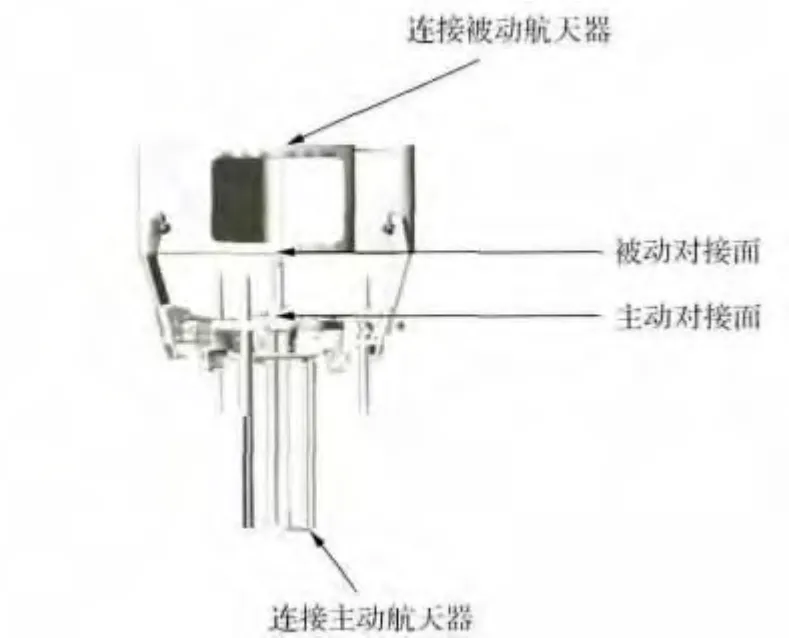
图3 对接机构虚拟样机模型Fig.3 Simulator of docking mechanism
3.2 仿真过程及参数
两航天器在相对静止且相对姿态角为零时为理想的对接状态,定义在对正对接状态下,捕获距离(图3中所示主、被动对接面中心轴向距离)为150mm时捕获指令发出,仿真过程开始,捕获距离小于1mm且无远离趋势时,仿真过程结束。
主、被动航天器分别连接于爪型对接机构主、被动部分上(图3)。其相对本体质心坐标系的质量特性如表1所示。

表1 航天器质量参数Table 1 Mass Parameters of Spacecraft
3.3 仿真结果分析
1)软连接段开始时刻的确定
对接过程开始时刻,捕获手为打开状态,接到捕获指令后,对接机构的捕获手首先收回合拢,三个捕获手的合拢情况相同,图4为其中一个捕获手肩关节的转角变化。
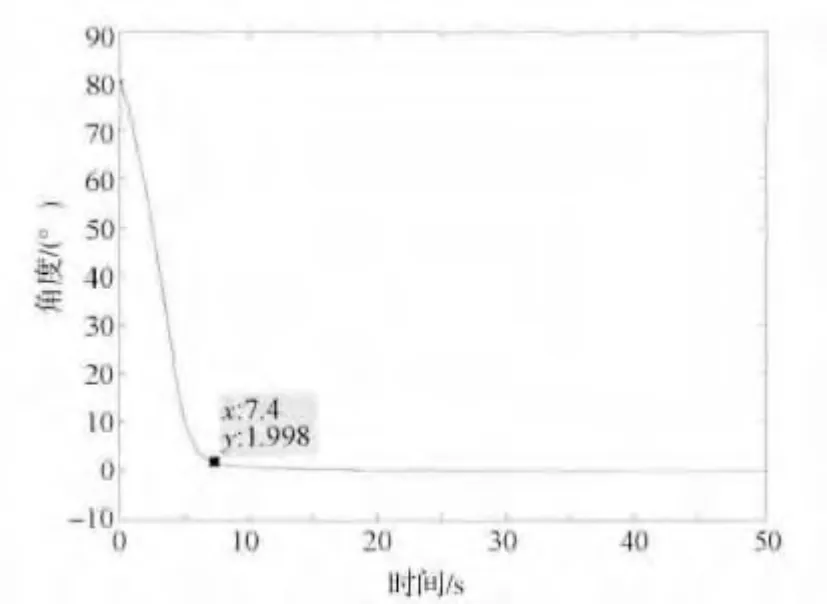
图4 捕获手关节转角Fig.4 Angle of capture hand joint
由图4可见,捕获手初始处于打开状态,其关节转角量在80°以上,在7.4s时,关节转角开始小于2°,捕获手关节转角合拢了98%以上,之后捕获手关节转角还有小幅下降,但是变化趋势平缓。当关节转角小于2°时,如果捕获手可以捕获到瓣壳,则瓣壳一定不会再脱离,认为捕获手合拢基本完成,规定7.4s时为软连接段的起始时刻,即捕获手的合拢只需要7.4s就完成了。
2)刚性连接段开始时刻的确定
刚性连接段的开始时,3 个缓冲器与3 个手指槽应全部同时受力,因为可能存在已有缓冲器与手指槽受力,但个别缓冲器或手指槽还未受力的情况,所以刚性连接段的开始时刻应为这6个受力位置中最晚受到力作用的时刻,图5为最后受力的手指槽受力变化,其他手指槽受力时刻稍早,但都在0.5s以内,在此没有列出具体曲线。
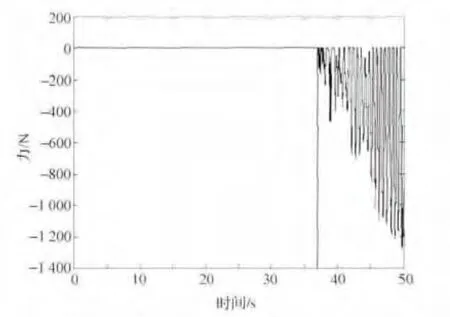
图5 手指槽受力Fig.5 Pressure of finger groove
由图5可见,从37s开始,捕获手受到手指槽的作用,说明已拉至手指槽位置;此时所有缓冲器也全部受力,分析可知,对接过程进入刚性连接段,定义刚性连接段开始时刻为37s,这段过程中捕获手与缓冲器对瓣壳形成运动约束。
3)对接过程分析
图6为主被动对接航天器的捕获距离变化曲线,捕获距离能够直接反映两对接部分的接近情况。
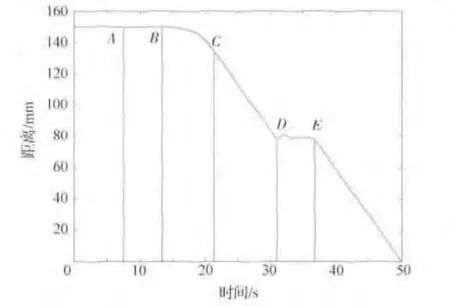
图6 捕获距离变化Fig.6 Variation of capture distance
由图6可见,0-13.5s,捕获距离保持在150mm,13.5-21.5s,捕获距离加速下降,21.5-30s,捕获距离匀速下降,30-37s,捕获距离波动且基本没有下降,37s至对接过程结束,捕获距离匀速下降。
首先分析初始捕获段,由图7可知,0-7.4s内捕获手夹紧力为0,说明捕获手没有接触瓣壳,所以捕获距离没有变化。在图6中,E点对应时刻为37s,与图5所示的手指槽受力时刻完全相同。此时刚性连接段开始,按机构原理可知,捕获距离匀速下降。AE段即为对接过程的软连接段,这段过程是对接过程中最复杂的阶段,下面对这段过程进行详细分析。

图7 捕获手夹紧力Fig.7 Pressure of capture hand
由图6可见,软连接段的AB段中,捕获手夹紧力为0,没有夹紧瓣壳,捕获距离仍然保持为150mm。由图7可见,在13.5s时,夹紧力开始上升,此时对应图6所示捕获距离的B点,在BC段,捕获距离加速下降,可知捕获手与瓣壳间存在相对运动,分析引起加速接近运动的影响因素,给出捕获手与瓣壳摩擦力变化如图8所示。
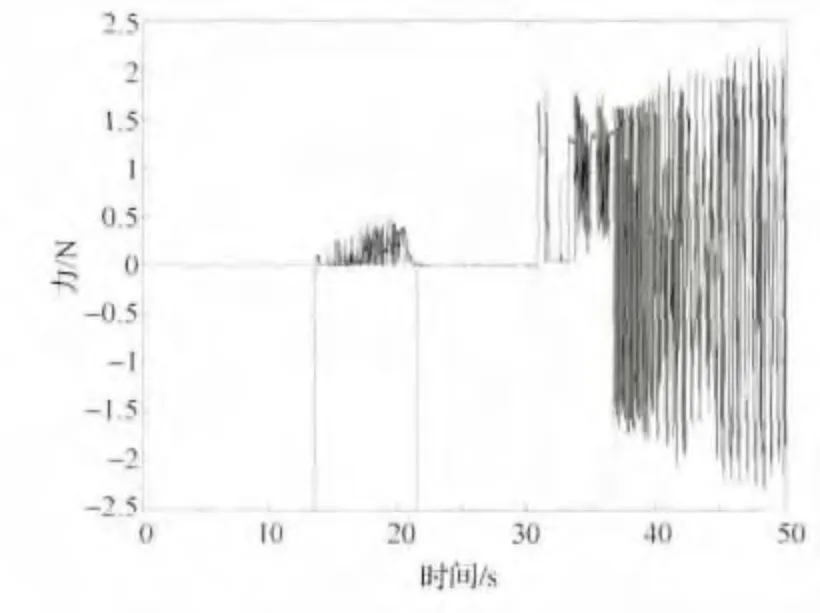
图8 捕获手摩擦力变化Fig.8 Variation of friction on capture hand
由图8可见,由13.5-21.5s,捕获手与瓣壳摩擦力大于0,对应图6的BC段,由于相对滑动摩擦力作用,捕获距离开始加速下降,当瓣壳在摩擦力作用下加速到与捕获手相对静止时,摩擦力又下降为0直至31s,对应图6中捕获距离CD段的匀速下降。
图9为缓冲器的受力变化情况,综合图8和图9分析,从31s左右开始,摩擦力和缓冲力都开始增加,说明瓣壳已经接触缓冲器,缓冲器才有力作用。缓冲器的弹性力会使瓣壳运动受到一定阻碍。由于静摩擦力作用,瓣壳体开始压缩缓冲器,捕获距离减小,当缓冲器压缩一定量后,缓冲弹力会大于静摩擦力,静摩擦力不足以保持瓣壳与捕获手的相对静止,捕获手指与瓣壳开始出现相对滑动产生滑动摩擦力,按照库伦摩擦力的原理,滑动摩擦力小于静摩擦力,因此缓冲器的压缩量释放,摩擦力又使瓣壳运动压缩缓冲器,如此反复作用引起图6中捕获距离DE段在78 mm 上下波动。从图9中可见,在31~37s时,缓冲力有三次大于零的波动,对应捕获距离DE段的3段下凹过程。由缓冲器行程变化(图10)也可以看出,这段过程中缓冲行程有三次上升,可以证明缓冲器反复受压,捕获距离持续波动。
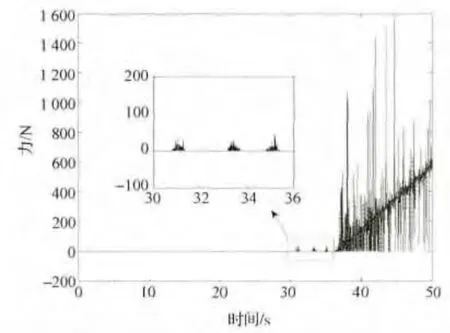
图9 缓冲力变化Fig.9 Variation of buffer force

图10 缓冲器行程变化Fig.10 Variation of buffer stroke
综上,爪型对接机构的对接过程分为五个阶段:①自由对接阶段。捕获手合拢但未接触瓣壳体,两个航天器处于自由状态。②加速接近阶段。捕获手夹紧瓣壳,两个航天器建立软连接;捕获手在丝杠驱动下以恒定速度向主动航天器收拢,因此捕获手与被动航天器间的相对滑动产生滑动摩擦力,导致两个航天器相互靠近。③稳定接近阶段。捕获手与被动航天器的速度保持一致,摩擦力为0,被动航天器以恒定速度接近主动航天器。④波动调整阶段。瓣壳接触到缓冲器顶端,由于缓冲器中弹簧的支撑作用静止;捕获手仍然以恒定速度向主动航天器收拢,捕获手与被动航天器间的相对滑动产生滑动摩擦力,摩擦力与缓冲力反复调整,捕获距离波动。⑤刚性连接阶段。捕获手拉至手指槽,被动航天器在缓冲器与捕获手的合力作用下,以恒定速度接近主动航天器直至对接结束,刚性连接建立。在不同的阶段中,对接过程的影响因素、作用机制及具体表现各不相同,分别由捕获手抓捕力、捕获手摩擦力、缓冲器弹簧力、丝杠驱动电机力等相互作用,交替出现。
4)缓冲器性能
图11为对接机构电机输入能量和缓冲器吸收能量的变化情况,红线为电机输入能量曲线,蓝线为缓冲器吸能曲线。因为初始时刻系统静止,所以电机输入的能量即为系统的全部输入能量。
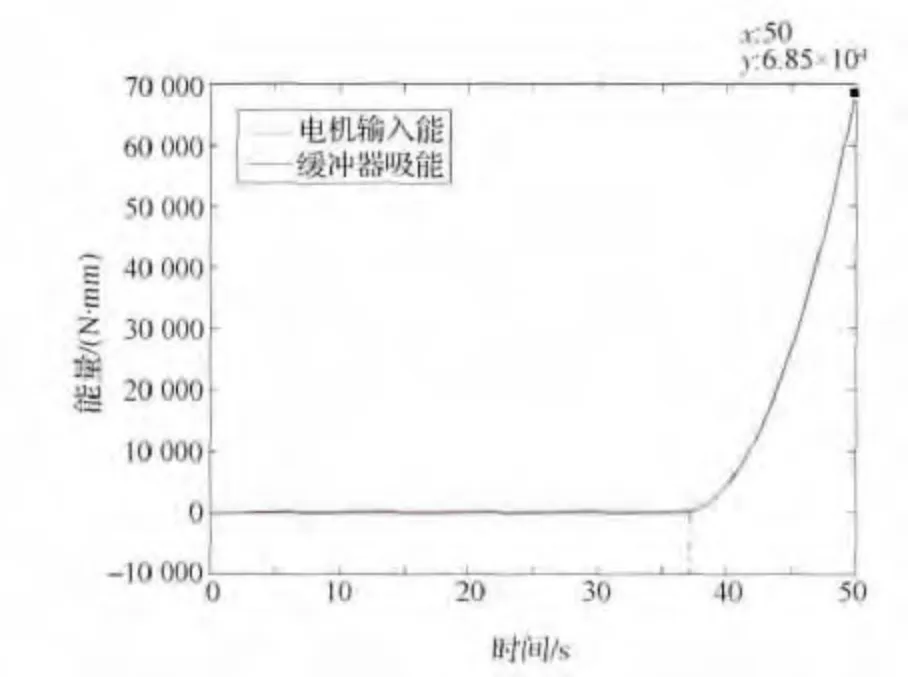
图11 缓冲器吸能情况Fig.11 Absorbable energy of buffer
由图11可以看出,两条曲线十分接近,3 个缓冲器吸收的总能量与电机输入的能量变化趋势相同,曲线前段比较平滑,因为被动部分还未压缩缓冲器,缓冲器没有吸能,电机输入能量在软连接段达到0.431J。从37s开始,缓冲器吸能和电机输入的能量同时开始增加。对接完成时,电机对系统输入的总能量为69.1J,主要作用于缓冲器的压缩,缓冲器储存了68.5J的能量可供分离使用,约99%的电能储存至缓冲器中。
4 结束语
本文通过对航天器爪型对接机构对接过程进行动力学研究,建立了反映对接机构接触、分离、滑动、摩擦和碰撞等非线性因素的动力学模型,实现了标称状态下对接机构对接过程的全程仿真模拟。结果表明:①爪型对接机构对接过程中,主被动航天器的接近情况不是线性减小的,捕获距离接近情况可分为前述五个阶段表现;②在捕获距离减小过程中,从30~37s有7s左右的波动过程,造成波动的原因是手指摩擦力与缓冲器弹力的相互作用,需进一步关注波动情况对两对接航天器及其有效载荷的具体影响;③从37s开始,缓冲器将持续压紧直至对接结束,捕获距离呈线性下降,缓冲器可以储存68.5J的能量供分离使用,约99%的电能储存至缓冲器中。
(References)
[1]娄汉文,曲广吉,刘济生.空间对接机构[M].北京:航空工业出版社,1992 Lou Hanwen,Qu Guangji,Liu Jisheng.Space docking mechanism[M].Beijing:Aeronautical Industry Press,1992(in Chinese)
[2]于伟,杨雷,曲广吉.空间对接机构动力学仿真分析[J].动力学与控制学报,2004,2(2):38-42 Yu Wei,Yang Lei,Qu Guangji.Dynamics analysis and simulation of spacecraft docking mechanism[J].Journal of Dynamics and Control,2004,2(2):38-42(in Chinese)
[3]曾辛,于登云,曲广吉.周边式对接机构的运动学问题[J].航天器工程,1994(3):36-41 Zeng Xin,Yu Dengyun,Qu Guangji.The dynamic problems of peripheral docking mechanism[J].Spacecraft Engineering,1994(3):36-41(in Chinese)
[4]于登云.航天与力学:内翻型与外翻型对接机构空间对接过程动力学仿真比较[M].北京:中国科学技术出版社,2005 Yu Dengyun.Aerospace and dynamics:the analysis comparison for out-transfer mode and in-transfer mode docking mechanism[M].Beijing:China Science and Technology Press,2005(in Chinese)
[5]杨芳,曲广吉.空间对接机构差动式机电缓冲阻尼系统机构传动原理分析[J].力学与实践,2000,22(6):51-54 Yang Fang,Qu Guangji.Analysis of mechanismic transmission principle for the differentially mechanicalelectronical buffer damping system in a spacial butt mechanism[J].Mechanics in Engineering,2000,22(6):51-54(in Chinese)
[6]李道奎,李明,盛以龙.航天器对接系统的Adams建模与仿真[J].湖南理工学院学报(自然科学版),2006,19(1):49-52 Li Daokui,Li Ming,Sheng Yilong.Modeling and simu-lating of the space vehicles docking system[J].Journal of Hunan Institute of Science and Technology(Natural Sciences),2006,19(1):49-52(in Chinese)
[7]黄奕勇,李强,陈小前,等.自主在轨服务航天器空间对接过程建模与仿真[J].计算机仿真,2011,28(10):57-60 Li Qiang,Huang Yiyong,Chen Xiaoqian,et al.Modeling and simulating of independent on-orbit servicing spacecrafts’docking process[J].Computer Simulation,2011,28(10):57-60(in Chinese)
[8]林来兴.美国“轨道快车”计划中的自主空间交会对接技术[J].国际太空,2005(2):23-27 Lin Laixing.The independent rendezvous and docking technology in the plan of Orbital Express in America[J].Space international,2005(2):23-27(in Chinese)
[9]P Motaghedi.On-orbit performance of the Orbital Express capture system,SPIE 69580E[C]//Society of Photo-Optical Instrumentation Engineers. Albuquerque:STAIF,2008
[10]T Nilson,S Christiansen.Docking system for autonomous,un-manned docking operations[C]//2008IEEE Aerospace Conference.New York:IEEE,2008:2770-2783
[11]S Stamm,P Motaghedi.Orbital express capture system:concept to reality[C]//Society of Photo-Optical Instrumentation Engineers. Albuquerque:STAIF,2004:78-91
[12]陈志伟,董月亮.MSC Adams多体动力学仿真基础与实例解析[M].北京:中国水利水电出版社,2012 Chen Zhiwei,Dong Yueliang.MSC Adams the base of multi-body dynamic simulation and example analysis[M].Beijing:China Water Power Press,2012(in Chinese)
[13]郑建荣.Adams虚拟样机技术入门与提高[M].北京:机械工业出版社,2002 Zheng Jianrong.Adams virtual prototype technology introduction and advancement[M]. Beijing:China Mechine Press,2002(in Chinese)
[14]MDI.Adams user reference manual version[Z].Winter Haven:Mechanical Dynamics Inc,2000
[15]G M L Gladwell.经典弹性理论中的接触问题[M].范天佑,译.北京:北京理工大学出版社,1991 G M L Gladwell.The contact issues in the classic elasticity theory[M].Fan Tianyou,translated.Beijing:Beijing Institute of Science and Technology Press,1991(in Chinese)
