轻小型再入飞行器发展研究
2014-12-28
(北京空间飞行器总体设计部,北京 100094)
1 引言
人类探索太空的脚步已超越地球空间逐步向深空迈进,并且探索的方式也逐渐由最初的遥感探测,逐步发展至着陆探测及取样返回。其中,取样返回探测作为深空探测的高级阶段,能够将目标天体物质带回地球进行更深入研究,因此对于深空探测具有重要意义,是其它探测方式无法取代的。
自20世纪50—60年代以来,美国与苏联分别提出了各自的月球探测计划,并实现了月球采样返回;20世纪90年代美、日等国家又先后启动了彗尘、太阳风、小行星等深空探测取样返回等计划,并于2004—2010年期间先后实现了样品取样返回[1-3]。与近地轨道返回器相比,上述深空再入返回器的任务具有再入速度高(一般大于第一宇宙速度[1-3])、任务周期长(数年)等特点,并且返回器将伴随探测器经历整个探测任务周期。因此为了控制返回器的质量与尺寸规模,均采用了轻小型化设计,以降低任务成本。
我国自20世纪70年代以来,已成功发射并回收了22颗返回式卫星与多艘载人飞船,表明我国已经掌握了近地轨道航天器返回技术。正在实施的月球探测工程,分为“绕、落、回”三个无人月球探测的发展阶段,其中嫦娥一号~三号探测器已经顺利完成绕月和落月任务。探月三期工程以突破在月面上采集样品技术、返回器高速再入地球技术,以及开展相关科学探测、采集并返回样品等为总目标,作为我国重大科技专项,探月三期工程为再入返回技术的发展提供了新的机遇。随着我国深空探测工程的进展,进一步探测太阳系内行星与小行星的任务也将逐步提上日程,包括有小行星取样返回、火星取样返回等,对这些天体的采样返回任务要求轻小型深空高速再入返回技术取得进一步突破。
本文概述了星尘号(Stardust)、起源号(Genesis)和隼鸟号(Hayabusa)深空高速再入返回飞行器再入任务的特点及设计情况,在此基础上分析了我国开展轻小型再入飞行器研究的需求,梳理了相关的关键技术,并给出后续发展规划与建议。
2 国外轻小型再入飞行器概况
以下分别选取了截至目前已经实施飞行试验的3个轻小型弹道式返回的返回舱进行介绍,包括美国的星尘号、起源号及日本的隼鸟号。
2.1 星尘号返回舱
星尘号探测器任务是美国NASA 喷气推进实验室(JPL)的一项行星际探测任务。2006年1月15日,星尘号探测器返回舱成功着陆在犹他州的试验着陆区(UTTR)。星尘号探测任务实现了首次收集彗星尘埃并将样品返回地球,也是继阿波罗计划以后美国第二个取回地外天体物质样品的项目。星尘号探测器采用由洛马(Lockheed Martin)公司开发的空间探测器(Space Probe)平台,主结构长0.66m,宽0.66m,高1.7m。探测器发射质量385kg,其中主体质量254kg,返回舱质量46kg。
1)气动外形及气动特性
星尘号返回舱外形如图1所示[4]。返回舱的前端为60°半锥角圆锥形,后端为被截平的30°锥台。整舱直径为0.811m,高度0.499m。
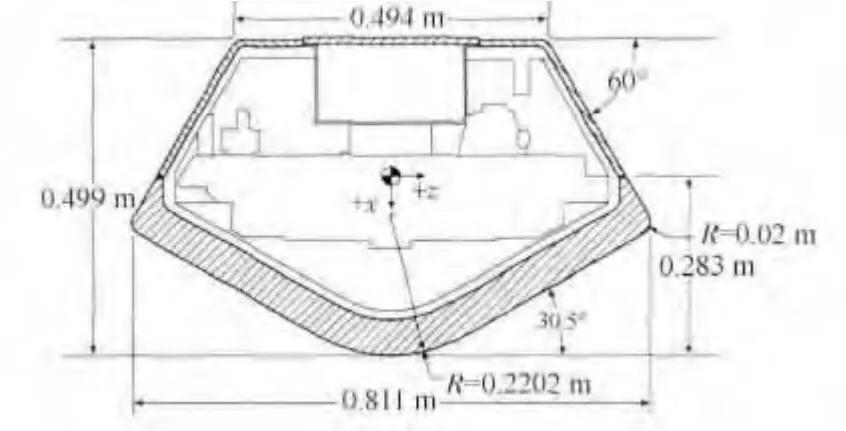
图1 星尘号返回舱气动外形Fig.1 Schematic of Stardust return capsule
(1)高稳定问题
高空稀薄流区,在高再入速度、小尺寸及小转动惯量特性的共同作用下,飞行器静稳定裕度低,容易导致大的再入攻角,极限情况可能进入倒向稳定状态,危及再入任务安全。尽管相关研究结果表明,通过将返回器的质心前移可以解决这一问题[5],但在工程上很难实现,最后通过把自旋速度由原来的5r/min提高至16r/min最终使问题大为改善[6]。
(2)动稳定问题
星尘号返回舱在马赫数(Ma)为1.2~2.8区域内小攻角范围是动不稳定的,而大攻角范围是动稳定的[7],返回舱会产生震荡幅度25°~30°的极限环。
2)防热设计
星尘号再入过程飞行的峰值热流密度12MW/m2,总加热量约为360 MJ/m2。受质量限制,星尘号前端热防护罩没有采用传统的热防护复合石炭材料,设计开发了轻型酚醛浸渍碳纤维烧蚀材料PICA(密度约为0.27g/cm3)热防护材料,防热层厚度58.4mm。该材料由美国NASA 艾姆斯研究中心(Ames Research Center)研制,通过了18 MW/m2的热防护试验考核。样品返回舱后端应用了洛马公司的烧蚀材料SLA-561V。该材料曾在海盗号(Viking)、火星探路者(MarsPathfinder)等火星探测任务和航天飞机上得到应用。
3)伞系系统
星尘号返回舱降落伞系统包括降落伞控制装置、降落伞及伞舱。降落伞控制装置包括弹伞筒和引导开伞装置,在降落伞舱外面有一个蓄气筒用来增压弹射筒弹出引导开伞装置,引导开伞装置弹出而带出主伞伞包;降落伞包括减速伞和主伞,减速伞为名义直径0.58 m 的盘缝带伞,主伞为名义直径7.3m 的锥形带条伞,完全打开后伞绳长度约5.2m;伞舱为直径16.51cm、高15.24cm 的容器。在再入和下降阶段,大气压力传感器将提供降落伞开伞时间所需要的必要信息。
4)再入过程
起源号返回舱再入飞行过程如图2所示。在再入前4h,探测器服务平台姿态机动,为样品返回舱建立适当的再入姿态,并起旋至13.5~16r/min。分离后返回舱自由滑行,直至进入大气层。进入大气层时刻(地面高度125km)返回舱的再入角约为-8.2°,速度12.8 km/s。进入大气层飞行后0.9min、距海平面高度61km,返回舱经历峰值热流环境。再入后1min、距海平面高度53km,返回舱达到峰值过载,约为40gn。
下降期间返回舱利用1个过载开关和2个计时器实现开启减速伞和主伞。再入后1.9min过载开关敏感到返回舱过载降低至3gn(高度约为36km),减速伞计时器启动计时,15.04s后开启减速伞,此时返回舱平均海平面高度约为32km,马赫数约为1.37。在主伞计时器计时350.6s后返回舱打开主伞,此时返回舱平均海平面高度3.1km,地面高度1.8km,马赫数为0.16。最终返回舱以3.9m/s的速度着陆。
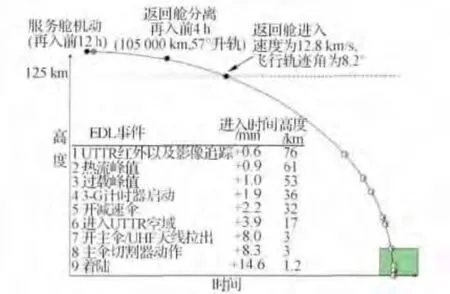
图2 星尘号返回舱再入飞行过程示意图Fig.2 Reentry process of Stardust return capsule
2.2 起源号返回舱
起源号探测器是美国NASA 发现(Discovery)计划一部分,用于在日地平衡点L1 处采集太阳风尘微粒并返回地球。2004年9月8日,起源号样品返回舱在第二宇宙速度下,以弹道式再入方式返回地球,着陆区为位于美国犹他州西北部的空军试验训练场(Utah Test and Training Range,UTTR)。由于加速度开关安装错误,降落伞未能及时打开,造成样品返回舱摔坏。
1)气动外形及气动特性
起源号返回舱气动外形与尺寸[8]如图3所示。返回舱的前端与星尘号返回舱相似,但后端呈双锥构型,其中第一个锥截面的倒锥角为20°,第二个锥截面的倒锥角为61.6°。整舱直径为1.52 m,高度0.964m。质量200kg。
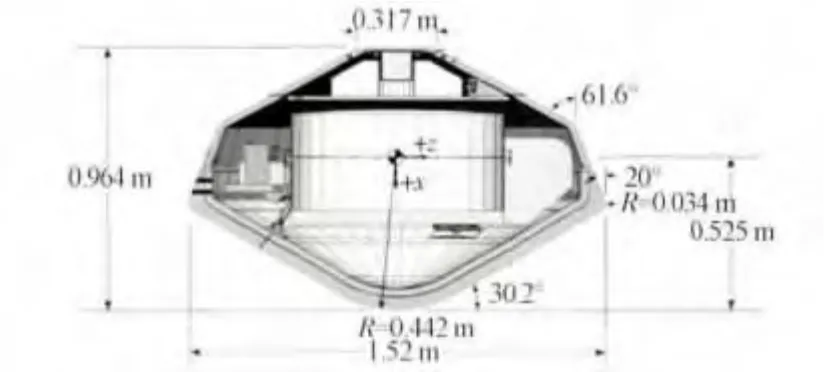
图3 起源号返回舱外形尺寸示意图Fig.3 Schematic of Genesis return capsule
由于起源号与星尘号的外形形似,大底均为60°的球锥外形,因此起源号和星尘号的很多气动数据库是共用的,但由于两者后体外形不同,星尘号为30°锥角的单锥形式,而起源号为双锥形式,因此两者的气动特性不完全一致。经气动研究,在对高超声速连续流区,起源号完全继承了星尘号的气动数据库,在自由分子流区和亚、跨、超声速区域,对气动特性数据差异性进行了修订[2]。
在动稳定性方面,地面试验表明[9]:返回舱在马赫数2.5以下,攻角15°以上仍然是动不稳定的,最大振荡幅度高达40°;在高超声速范围返回舱是动态稳定的。
2)防热设计
起源号返回舱再入过程驻点的峰值热流约6MW/m2。前端热防护罩热防护层采用了碳-碳材料,该防热材料首次应用于进入任务,因此进行了5次电弧风洞烧蚀验证试验。返回舱后罩热防护层也采用了SLA-561V材料,能够承受标称值0.24MW/m2的峰值热流,并且通过了电弧验证试验。
3)伞系系统
起源号返回舱的伞降设备采用两级降落伞减速装置,降落伞系统由1顶减速伞和1顶主伞组成,减速伞为名义直径2.03 m 的锥形带伞,主伞为弦长3.1m、展长10.5m 的翼伞。开伞过程如图4所示。
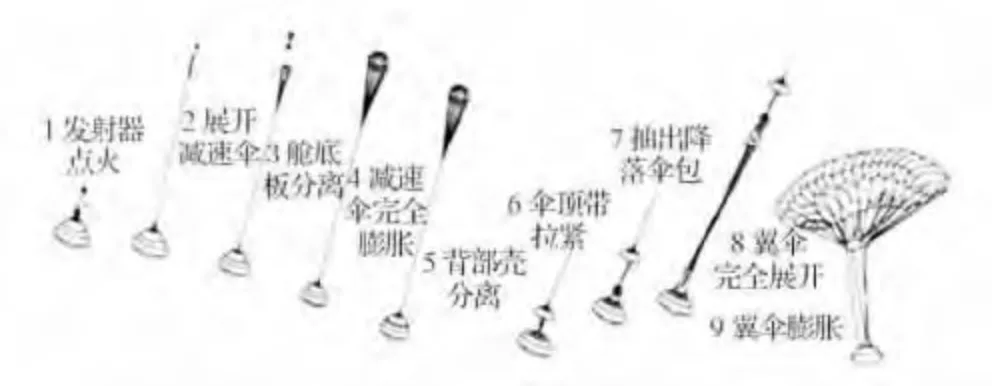
图4 起源号返回舱降落伞展开过程示意图Fig.4 Sketch of the Genesis parachute deploy
4)再入过程
在高度为65 896km 处,返回舱以0.914m/s的速度与平台分离,分离后返回舱自由滑行,直至进入大气层。返回舱进入地球大气层时(高度125km)的自旋角速度为15r/min,再入角约为-8.0°,速度11km/s。进入大气层飞行后59s、距海平面60km,返回舱经历了峰值热流环境;再入后70s、距海平面52km,再入过载达到27gn峰值。
与星尘号返回舱相同,下降期间起源号返回舱利用1个过载开关和2个计时器实现开启减速伞和主伞。再入后2min1s,再入过载降低至3gn(高度约为35km),过载开关接通并气动计时,5.6s后开减速伞,此时返回舱平均海平面高度约为33km,马赫数约为1.8。在主伞计时器计时260s后返回舱打开主伞,此时返回舱平均海平面高度7.4km,马赫数为0.15。返回舱的设计着陆速度为4.5m/s。
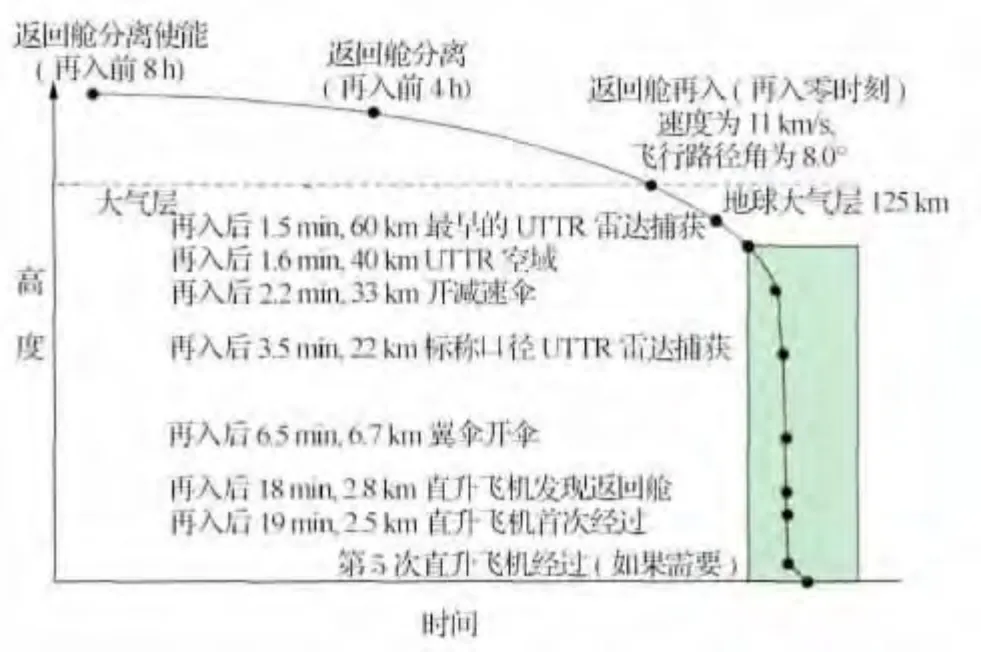
图5 起源号返回舱再入过程的飞行时间序列计划Fig.5 EDL process of Genesis return capsule
2.3 隼鸟号返回舱
隼鸟计划(Hayabusa,又称MUSE-C)是日本首个带有返回任务的深空探测计划,其主要任务是在具有微重力的糸川(Itokawa)小行星上着陆,进行采样并返回地球。
隼鸟号探测器于2003年5月9日发射升空,2005年9月,探测器与Itokawa小行星交会,并在飞行至距离小行星表面小于20km 处时进行观测,随后在小行星表面采集样品。由于隼鸟号探测器在轨飞行过程中出现了一系列故障,包括姿态控制装置反作用轮故障、化学推进燃料泄漏和蓄电池丧失功能等,探测器未能按照原定计划在2007年6月返回。通过抢救操作,2010年6月14日,隼鸟号样品返回舱在第二宇宙速度下,以弹道式再入方式返回地球。
1)气动外形及气动特性
隼鸟号返回舱大底是45°半锥角的球锥,直径为40cm。在高超声速连续流区,返回舱在20°攻角下的轴向力系数约为1.05,法向力系数约为0.45。计算结果表明,返回舱在高空自由分子流区以及部分过渡流区存在静不稳定现象[10],如果不采取措施将无法维持再入姿态,需要采取自旋稳定的形式才能够克服该现象。
2)防热设计
隼鸟号返回舱采用弹道式再入,驻点热流密度峰值10 MW/m2。防热大底和倒锥均采用碳/酚醛防热材料,防热大底防热层厚度为30 mm,倒锥防热层厚度为20mm。
3)伞系系统
隼鸟号返回舱的进入减速着陆系统采用的是一级降落伞减速装置,无引导伞和减速伞。降落伞系统由一个名义直径为2.86 m 的主伞组成,主伞为十字型伞。
4)再入过程
2010年6月13日10时54分(协调世界时,UTC),返回舱与隼鸟号平台舱分离,13时51分返回舱进入大气层,飞行速度约为12km/s,再入角为12.35°。在高度10km 时(马赫数约0.8)返回舱抛伞舱盖,同时抛防热大底,当防热大底与仪器装置分离时主伞打开。返回舱最终以8~10 m/s的速度着陆。
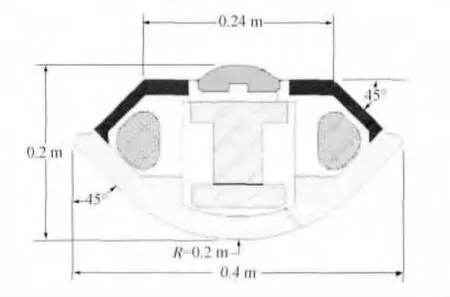
图6 隼鸟号返回舱气动外形Fig.6 Schematic of Hayabusa return capsule
2.4 任务特点
表1列出了星辰号、起源号和隼鸟号返回舱的部分主要设计参数。
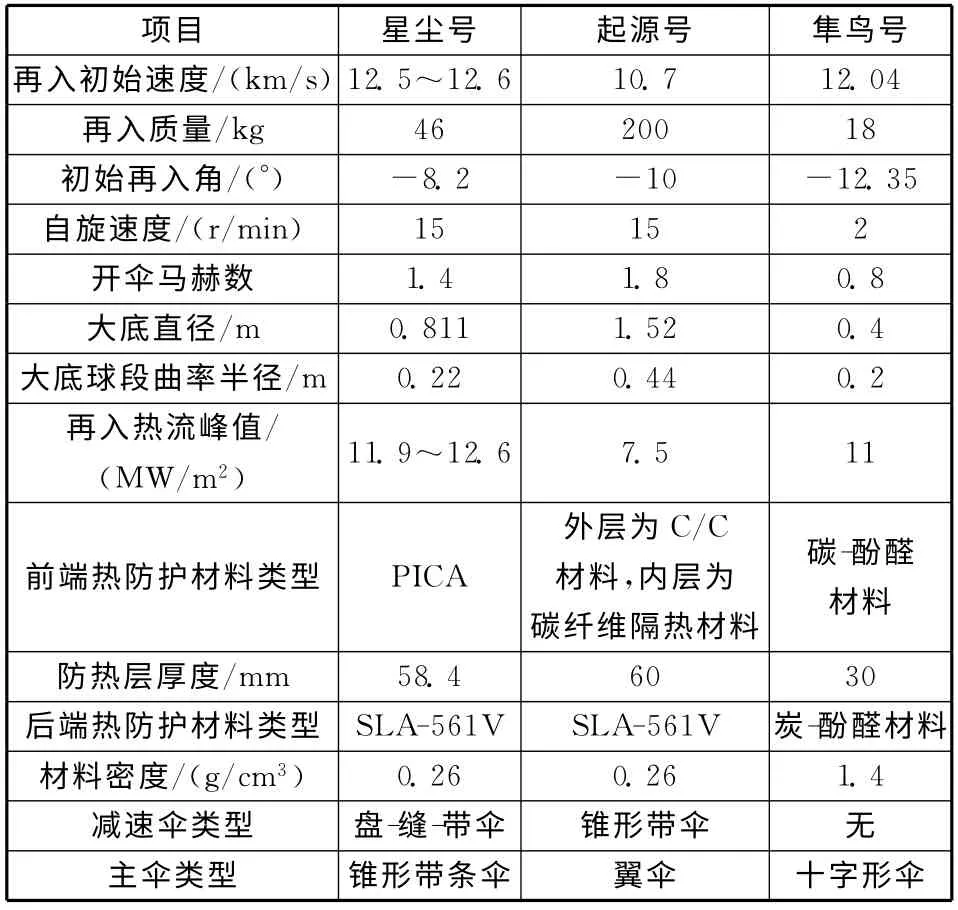
表1 三返回舱主要设计参数Table 1 Key parameters of the three capsules
根据表1所示,比较星尘号、起源号和隼鸟号的返回器任务特点,可以得出如下共同点:
(1)返回器尺寸和质量规模均较小。由于深空探测任务持续时间长达数月甚至是数年,而返回飞行器需经历探测任务整个过程,因此其实现轻小型化对于降低整个系统的规模有重要意义。针对严格的质量限制要求,返回器在满足样品存储条件的基础上,尽可能提高设备的集成度,实现系统轻小型化。
(2)深空探测返回飞行器再入地球的速度要远高于近地轨道再入返回飞行器,速度范围一般在10~13km/s间。
(3)深空无人采样返回器普遍采用弹道式再入方式。虽然弹道式再入会产生较大的峰值热流密度与峰值过载,但简化了返回舱系统配置,有利于实现轻小型化。
(4)深空取样返回器气动外形普遍采用大钝头的球锥外形,大底半锥角通常在45°~60°之间,后壳可根据舱内装载需求采用单锥或双锥形式。此类外形具有气动阻力大(外形阻力系数通常大于1)、后体热流密度小等特点,有利于提高返回器的减速效率。但此类外形在高空稀薄区往往存在静不稳定,可通过使返回器自旋再入解决。
(5)一般采用超声速开伞方式。由于大钝体飞行器外形在跨声速和低超声速区域普遍存在小攻角的动不稳定现象,且返回器质量较小,因此可以通过超声速开伞设计避免进入严重的动不稳定状态。
(6)热防护系统均选用了耐高热流、传热慢的低密度防隔热材料,防热材料为烧蚀型。对于大钝头球锥组合外形的返回舱,防热结构主要集中在迎风大底位置,而过肩部以后防热质量很小。
3 我国轻小型再入返回器技术需求及思考
3.1 我国轻小型化深空高速再入返回飞行器发展需求分析
(1)高速再入返回气动技术。以接近甚至高于第二宇宙速度采用弹道式再入方式再入返回,是轻小型高速再入返回飞行器主要特点。出于轻质化和高减速效率考虑,轻小型高速再入返回器气动外形一般为长细比较小(0.5左右)的短钝体,在再入初期过渡流区往往存在轻微的静不稳定现象;高速高温环境带来热流密度峰值很高,而轻质化要求不允许防热结构留有很大余量,因此需要对热环境精确预测以为防热设计提供合理输入;高速弹道式再入对地面气动设计数据精度要求更高,需要充分预测计算/试验误差、防热材料不均匀烧蚀及质心变化等对飞行器配平气动特性带来的偏差。
(2)轻小型高速再入返回热防护技术。国外轻小型深空探测高速返回器再入最高热流密度基本在10 MW/m2以上,其热防护系统均针对返回飞行器的热环境特点研制了耐高温、耐冲刷的超低密度防热材料(0.24~0.497g/cm3),且结构上采用了烧蚀/隔热/承力结构一体化的设计方案,使防热结构兼具隔热和承力功能,或在烧蚀与承力结构间采用夹层设计实现隔热效果。由此,我国轻小型高速再入返回飞行器能够实现相当小的质量规模。
(3)超声速降落伞回收技术。选用倒锥体外形的轻小型高速再入返回器在亚跨声速阶段普遍存在动不稳定,同时由于弹道式再入方式下返回器没有姿态调整控制能力,所以在亚跨声速阶段会出现较大的姿态振荡,如果采用常规的亚声速开伞方式,整个返回器将无法完全保证降落伞的开伞姿态,进而影响回收的安全性。为了确保返回器的末段减速顺利安全进行,需考虑超声速减速伞加主伞的回收方案。超声速减速伞主要用于改善超声速至亚声速段的气动稳定性,为主伞提供较好的开伞姿态,在超声速减速伞设计时,超声速区的气动稳定性、阻力特性和适应轻小型任务的伞系轻小型化设计是难点也是关键点。此外,对于超声速减速伞的控制,以及伞系的仿真和试验验证等也是当前降落伞设计面临的新问题,需要开展专项研究。
(4)轻小型机构与综合电子技术。与近地轨道返回器相比,深空再入返回器再入速度高,同时针对无人采样返回任务,返回器经历整个探测任务周期,因此都需要严格控制返回器的质量与尺寸规模,尽量实现轻小型化。根据返回器的一般质量分配比例,除防热系统外,返回器机构与电子设备的轻小型设计是实现整器轻小型化的重要因素。深空再入返回器的另一个特点,是在轨飞行时间长,因此对返回器电子设备等提出了高可靠性要求。
3.2 我国开展轻小型再入返回器的思考和建议
(1)加强新型气动外形设计与优化研究。目前国内气动外形设计技术基础仍显薄弱,应尽快开展返回器气动外形的多目标、多约束优化方法研究,结合返回器再入任务约束以及对气动特性的要求,进行气动选型及多目标气动外形优化工作;积极开展气动数据的不确定度确定方法研究,提高气动数据的可靠性;对于气动热环境的高精度预测方面,需要着重对湍流、化学反应等对热环境的影响进行深入研究。
(2)开展轻型防热结构研究。研制更低密度抗烧蚀防热材料,同时改进现有防热结构方案,研究一体化防热结构的技术可行性,重点突破高低温交变、耐高热流、低导热系数的烧蚀材料,以及防热材料的烧蚀-传热耦合分析方法。同时强化地面试验,开展烧蚀机理建模分析。
(3)开展超声速回收技术研究,尤其是超声速降落伞伞形的设计与优化,以及超声速开伞控制方式研究。着重突破降落伞三维流固耦合仿真技术,考虑深空探测返回任务需求,分析确定伞衣材料类型;多方案比较环帆伞、盘缝带伞等不同伞型针对超声速高空开伞任务的适应性;开伞控制方法的设计,需要考虑到再入弹道的所有包络,即包括标称再入弹道和各种偏差弹道,同时还要考虑到可供选择的控制方法与具体实施的控制部件,确保整个减速系统在开伞后的各种工作状态下,所有的程序动作均能及时、可靠地完成。
(4)充分利用搭载机会开展飞行演示验证。轻小型高速再入返回器质量较小,搭载相对简单,应充分利用搭载机会开展飞行演示验证,获取实际再入飞行数据,用以验证气动外形适应性、气动力热数据准确度,验证热防护系统的力热环境承载能力。
4 结束语
深空再入返回相比近地轨道返回再入速度更高,同时针对无人采样返回任务,返回器要经历整个探测任务周期,需要控制返回器的质量与尺寸规模,尽量实现返回舱的轻小型化,这些给返回器的弹道设计、结构和防热设计等带来了更大的挑战。本文调研了星尘号、起源号和隼鸟号3个典型深空高速再入返回器的情况及技术特点,在此基础上分析了我国开展轻小型再入返回器研究的技术需求,指出应在高速再入返回气动技术、轻小型高速再入返回热防护技术、超声速降落伞回收技术、轻小型机构和综合电子技术等方面进行前期技术储备,为日后我国轻小型再入返回器的设计进行技术积累。
(References)
[1]Martin W L,Bobby G W,Williard E B,et al.Genesis mission design,AIAA-98-4468[R].Washington D.C.:AIAA,1998
[2]Desai P N,Cheatwood F M.Entry dispersion analysis for the Genesis sample return capsule[J].Journal of Spacecraft and Rockets,2001,38(3):345-350
[3]Yasuhiro Morita,Jun’ichiro Kawaguchi,Yoshifumi Inatani,et al.Development status of the high-speed reentry system-dash[J].Acta Astronautica,2003,53:971-981
[4]Prasun N Desai,Daniel T Lyons,Jeff Tooley.et al.Entry,descent,and landing operations analysis for the Stardust entry capsule[J].Journal of Spacecraft and Rockets,2008,45(6):1262-1268
[5]Richard G W,Robert A M,James N M.Low density aerodynamics of the Stardust sample return capsule,AIAA 97-2510[R].Washington D.C.:AIAA,1997
[6]Mitcheltree R A,Wilmoth R G,Cheatwood F M.Aerodynamic of Stardust sample return capsule,AIAA 97-2304[R].Washington D.C.:AIAA,1997
[7]Chapman G T.Transonic and low supersonic static and dynamic aerodynamic characteristics of the Stardust sample return capsule,AIAA 99-16833[R].Washington D.C.:AIAA,1999
[8]Martin W L,Bobby G W,Williard E B,et al.Genesis mission design,AIAA 98-4468[R].Washington D.C.:AIAA,1998
[9]Cheatwood F M,Winchenbach G L,Hathaway W.Dynamic stability testing of the Genesis sample return capsule,AIAA 2000-1009[R].Washington D.C.:AIAA,2000
[10]Kazuhisa Fujita,Yoshifumi Inatani,Kojyu Hiraki.Assessment of dynamic stability of Muses-C capsule in hypersonic rarefied regime,AIAA 2003-3893[R].Washington D.C.:AIAA,2003
