多任务模式电推进技术
2014-12-28
(中国空间技术研究院,北京 100094)
1 引言
电推进是一种新型航天动力系统,是航天器推进系统的重要发展方向。它利用在轨获取的电能高速驱动工质产生推力,相对于化学推进具有比冲高的突出优势。美国、日本、俄罗斯、欧洲等国家和地区从20世纪90年代开始广泛采用电推进来提升其航天器性能,以增加有效载荷能力,延长航天器的使用寿命,精确控制、消除指向误差,实现多任务模式等[1-8]。
当前,电推进的应用已逐渐由地球静止轨道(GEO)的南北位置保持向包含南北位置保持、轨道转移等任务在内的更深化应用转变[9-10]。在轨位置保持和轨道转移对电推进系统的需求重点不同。在轨位置保持需要在相对较小的输入功率条件下产生一定的推力;轨道转移则要求较大的推力,以缩短轨道转移时间,轨道转移期间有效载荷不工作,整星提供给电推进系统的功率较大。多任务模式电推进技术能较好地适应上述任务需求,利用大功率输出模式实现大推力控制,利用小功率输出小推力,从而满足不同阶段的不同需求。此外,多任务模式电推进技术可用于深空探测器的姿态调整,也可与其他推进系统联合作为主推进系统;还可用于空间站姿态轨道控制及轨道维持任务。
本文介绍了多任务模式电推进的特点及应用,分析了相关关键技术,最后提出了发展多任务模式电推进应解决的关键技术。
2 多任务模式电推进的发展
目前,电推进技术比较成熟的应用是高轨卫星的位置保持任务。高效的在轨位置保持要采用高比冲的电推进,其推力功率比大,能够适应小推力和少耗电的要求。该技术已应用在波音公司的波音卫星系统-601(BSS-601)平台和BSS-702平台,洛马公司的A2100平台,劳拉空间系统公司的LS3000平台,阿斯特里姆公司的欧洲星-3000(Eurostar-3000)平台,欧洲航天局的“阿特米斯”(Artemis)平台,以及俄罗斯的“快讯”(Express)和Seset等通信卫星平台。国内目前主要是在新平台上开展电推进系统的工程化应用。
在兼顾轨道保持及轨道转移等多任务需求方面,由于受到变轨时间等限制,对电推进要求较高,从低轨到GEO的轨道转移需求来看,在卫星入轨质量1500~5000kg、速度增量1900m/s、转移周期6个月的限定条件下,需要的电推进推力范围为268~893mN。波音公司的BSS-702HP和BSS-702MP平台配置两套完全冗余的离子电推进系统,在满足南北、东西位置保持任务的同时,已具有实现变轨和动量轮卸载的备份功能。洛马公司基于A2100M 平台研制的新一代“先进极高频”(AEHF)军用通信卫星,已率先采用5千瓦级多模式霍尔电推进系统,执行发射后的部分轨道提升和在轨位置保持任务,使有效载荷的质量提高了908kg[1]。2012年,AEHF卫星在远地点发动机失效的情况下,使用电推进成功实现了卫星救援,充分说明了多任务模式电推进的卓越性能。另外,波音公司在BSS-702平台的基础上开发了BSS-702SP全电推进平台。该平台不配置远地点化学发动机,采用全电推进实现变轨和位置保持等多种任务,有效地降低了平台质量,从而可提高有效载荷的质量,或降低发射成本。阿斯特里姆公司正在开展全电推进卫星平台的开发,劳拉空间系统公司也会推出全电推进卫星平台。俄罗斯Fakel设计局的SPT-100霍尔推力器,目前已经形成一系列产品型谱,用于轨道保持任务,新型的推力器SPT-140可以满足轨道机动要求。Fakel设计局还计划实现大功率、大推力霍尔电推进,用于轨道转移任务。可见,多国都在后续的航天计划中拓展电推进的应用能力和水平。目前,我国的电推力器远不能满足轨道转移的需求,因此有必要加紧开展多任务模式电推进技术的研究。
多任务模式电推进系统基于同一套硬件系统设计,通过改变系统工作参数,实现不同模式的切换,一般可分为双模式、多模式和连续可调模式三类。双模式电推力器的代表产品为美国的XIPS-25 离子推力器和BPT-4000霍尔推力器[2];多模式电推力器的代表产品为美国的NSTAR-30、NEXT-40离子推力器和T-140霍尔推力器,俄罗斯的D-80霍尔推力器;连续调节模式以英国Qinetiq公司的T-6离子推力器为代表。国内的多任务模式应用起步较晚,还处于原理样机阶段。具体多任务模式电推进的研究情况见表1和表2。

表1 霍尔电推进的主要性能及应用Table 1 Main performances and applications of Hall electrical propulsion

表2 离子电推进的主要性能及应用Table 2 Main performances and applications of Ion electrical propulsion
3 多任务模式电推进的特点及应用
3.1 特点
未来卫星平台对推进系统的要求是,既要实现小推力、高比冲、长寿命的应用,又要满足大推力、大功率的应用任务。从任务角度来看,电推进系统可以分为电推进一体化独立系统和混合兼容系统。电推进一体化独立系统可实现多种任务模式的转换及优化组合,能够完全支持全电推进卫星平台及后续新型高轨机动卫星平台的转移轨道变轨、位置保持及姿态调整等任务,即在GTO 至GEO 的转移阶段,或者特殊的机动阶段,使用大推力工作模式,在卫星定点后全生命期间的位置保持任务,则使用高比冲、小推力的电推进模式。混合兼容系统是通过双组元化学推进系统、单组元化学推进系统和电推进系统有机集成,在优化设计的基础上形成的能够适应复杂任务需求的先进推进系统[10]。混合兼容系统可以在面对不同的任务需求时采用最合适的推进模式:需要大推力、大速度增量、短时间轨道转移时,采用大推力双组元化学推进和大推力电推进互为备份或联合工作来实现;需要快速轨道机动时,采用中等推力双组元或单组元化学推进来实现;需要高效率轨道提升、在轨维持或者空间巡航时,采用高比冲、小推力电推进独立系统来实现。
3.2 应用
开展多任务模式电推进技术研究,是在有限航天器功率条件下实现电推进系统应用效益最大化的必然选择。以高轨卫星轨道抬升为例,参考BSS-702平台和A2100M 平台电推进轨道转移策略。第一阶段,使用化学推进和电推进联合变轨:首先,利用化学推进490N 发动机使卫星进入GTO+轨道(近地点高度在10 000~36 000km),且卫星倾角近似为0;然后,利用电推进使卫星从GTO+轨道进入GEO。第二阶段的电推进工作又可分为:①电推进每圈点火几十分钟到几小时,使卫星倾角为0并抬升近地点,轨道周期为24h;②电推进连续点火,抬升近地点,降低远地点,实现卫星GEO 注入。通过设置GTO+轨道参数,可以调整化学推进和电推进的任务分配比例。当GTO+轨道与GEO 重合时,轨道转移任务将全部由电推进完成。
轨道抬升对轨道转移时间的要求较高,要权衡比冲和推力。质量提升与电推进变轨时间、电推进比冲、电推进推力等相关[9],从表3可以看出,入轨质量的增加,意味着卫星平台装载有效载荷能力的提升。电推进的推力需求达到360 mN 以上,才能更好地缩短变轨时间。此外,对于轨道转移任务,电推进的工作功率一般应达到9000W 以上。对于电推进一体化独立系统,推力应为50~360mN,变轨比冲不小于1500s,效率不低于50%,功率为4~9kW;位置保持的比冲不低于3000s,效率不低于50%,功率为1.5~2kW。对于混合兼容系统,化学推进的推力为490N,比冲为315s,电推进的推力为50~270mN,比冲不低于3000s。
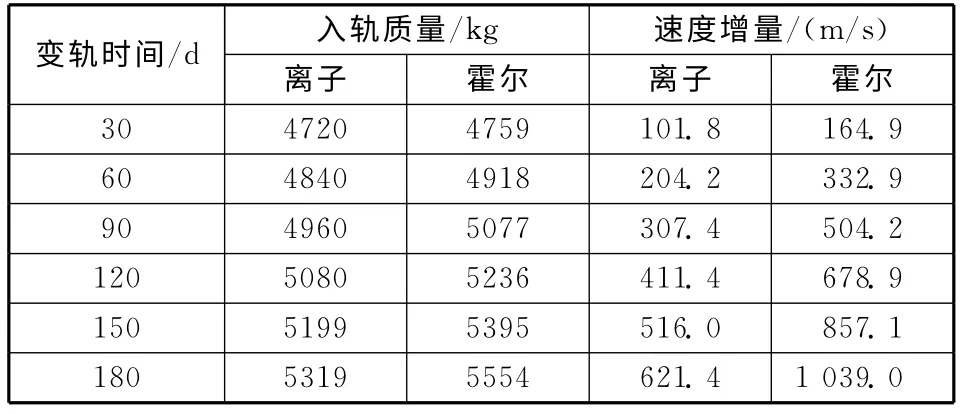
表3 电推进变轨时间与入轨质量、速度增量的关系Table 3 Time of orbit transfer with injection mass and velocity increment by using electrical propulsion
从电推进的比冲、推力、效率、输入功率之间的关系可知,除非输入更大的功率来提高比冲和增加推力,否则在功率一定的情况下,要使电推力器同时获得大推力功率比和高比冲是非常困难的。针对这一不可克服的电推进内在限制条件,开始研究和发展在同一电推力器上实现两个或更多的工作模式,以适应大推力或高比冲的工作要求。
4 关键技术分析
虽然单一任务模式的电推进已经实现了性能的稳定和优化,如高比冲的离子推力器和大推力的霍尔推力器,但要在同一推力器上实现两个工作参数差别很大的任务模式兼容,并确保工作性能,实现相对较高的效率,面临的新技术问题还很多,难度也较大,目前在国外也没有完全解决。现将多任务模式电推进要解决的关键技术总结如下。
4.1 电推进系统平台应用技术
电推进系统平台应用策略优化,不仅涉及到任务需求分析和系统性能分配,还涉及到整星的功率分配、包络限制等总体因素。通过系统及资源配置优化、平台的布局优化等措施,实现电推进系统应用集成;通过电推进系统使用策略优化分析,确定轨道机动、小推力连续轨道转移、在轨维持等典型任务的优化计算模型;通过电推进系统故障检测、隔离及恢复(FDIR)技术,解决轨道转移及在轨过程控制中必要的补偿技术、电源及控制耦合技术等,更好地优化电推进的可靠性和安全性;通过电推进羽流试验及仿真等途径,解决羽流与整星相互影响的技术问题。具体包括以下几点。
4.1.1 平台的优化技术
推力器的布局要考虑在实现轨道位置保持时,南北位置保持与东西位置保持的耦合尽可能小,同时,在最优使用效率的前提下,在布局上尽量避免星载光学姿态敏感器和太阳翼等受到羽流的污染损害,并使羽流对太阳翼附加的干扰力矩尽量小。电推进的供给系统则要结合现有化学推进系统管路布局,进行小型化和集成化设计;另外,供给系统进行热控时,除考虑材料本身的耐高低温能力外,还必须同时考虑推进剂的物理特性(在轨工作状态下氙气不得发生液化),而且应保证氙气瓶中的氙气压力小于氙气瓶的最大工作压力。同时,根据贮供流量模块的工作特性要求,应保证氙气进入小流量控制器前的温度低于小流量控制器的控制温度,以避免流量控制的失效。而且,在热控过程中还应尽量减少2个氙气瓶质量不均匀造成的整星质心偏斜。
4.1.2 多任务控制策略
一方面,南北位置保持及东西位置保持任务要结合整星需求和控制能力,确定每次矢量调节机构的调整时间,考虑光压、干扰力矩等影响下的控制策略和故障模式下必要的电推进工作参数调整策略。在控制策略方面,卫星要实现长期在轨工作,对电推进系统的长寿命要求最高;电推进的姿态控制策略主要是为整星控制系统设计,提供姿态调整的输入依据,即采用电推进进行姿态调整,消除电推进工作过程中可能产生的干扰力矩,干扰源主要来自于离子推力器的推力矢量偏心及羽流效应。电推进的变轨策略研究需要通过优化设计确定最佳变轨推力、变轨时间和推进剂消耗量的关系,同时开展自主变轨控制策略研究,以及各种干扰影响下的小推力连续轨道转移仿真。
另一方面,在利用电推进实施轨道抬升中,由于电推力器的推力小,因此轨道抬升的弧段损失、轨道控制弧段的测控是否可见、变轨时间与燃料消耗的综合评价等轨道设计问题,因每圈次电推进变轨耗时长、弧段可见性复杂而产生的星上自主定轨问题,以及变轨过程需要供配电、热控、测控的系统协调等问题,均是多任务模式电推进控制中必须解决的。
4.1.3 电推进系统的FDIR 策略
电推进在卫星平台上应用,要解决系统的FDIR策略。故障检测是通过硬件和软件检测,将故障相关参数和数据保存于故障历史记录缓存中,根据需要下传至地面。故障隔离是通过系统冗余设计的方式,实现对推力器的切换隔离,对贮供子系统支路的选择切换,以及对电源处理单元中故障模块的隔离防护等。故障恢复是通过最优主备重组策略等方式,根据故障的严重等级制定故障恢复方法。通过系统层面的FDIR 设计,提高分系统单机相关软件和硬件的检测能力,更有效地隔离故障部件或将其输出信号在控制回路中断开,使故障不会影响卫星正常的控制任务;同时,通过恢复策略设计,优化系统备份设计和单机的冗余设计。
4.1.4 电推进应用的羽流防护技术
羽流等离子体特性包括羽流中高速的氙离子、低速的交换电荷离子中的氙和钼离子的密度及能量特性,氙原子和钼原子等中性原子的运动参数特性及电子参数特性(包括电子密度、温度特性)等。研究这些粒子的分布、电势、能量特点,有助于深入研究掌握羽流等离子的分布规律,掌握等离子羽流对卫星的影响规律,进而能更好地评估离子推力器的工作性能,羽流等离子体环境对太阳翼的充放电影响,以及羽流溅射刻蚀及污染效应。
4.1.5 系统长寿命设计技术
长寿命、高可靠技术也是保证高轨卫星实现任务目标的关键技术。离子电推进正是满足高比冲、长寿命需求而广泛应用于高轨卫星的位置保持任务。目前,国外霍尔电推进系统的最长验证寿命还不到8000h,而离子电推进系统已经达到35 000h。未来,多任务模式电推进技术在变轨和南北位置保持中的工作时间更长,且没有化学推力器作为备份,要求具备长寿命和高可靠性,因此要进行电推进系统的延寿设计。
4.2 多任务模式推力器技术
4.2.1 离子电推进技术
(1)多任务模式设计。离子电推进的大推力工作模式可以缩短卫星的转移周期,减少经历辐射带的次数;小推力、高比冲工作模式则有利于卫星在GEO 运行阶段最大限度地节省推进剂消耗。对离子推进系统而言,这两种模式的比冲相对变化不大,变化主要体现在推力上,可通过调整电功率和流量来实现。双模式设计要重点解决两种模式下的效率问题和推进剂的利用率问题。
(2)栅极组件设计。栅极磨损是影响离子推力器寿命的主要原因之一。双核离子及截获电子对栅极组件的溅射腐蚀影响和热变形影响,都是导致栅极结构性失效的重要因素。推力器的延寿设计要避免栅极的结构性失效,实现大面积钼栅抗震性能的优化设计,突破栅板成型、栅孔刻蚀工艺设计,以及高温工况下栅极热形变控制方案设计等。
(3)放电室设计。放电室设计主要是磁场构型优化设计,包括磁极布局、磁路形位的优化设计。此外,为了实现多任务模式工作,还要进行工作点参数的匹配、优化,其中包括减小放电损耗、提高等离子体均匀性方面的设计等。在仿真分析方面,目前要进一步开展放电室电离稳定性的研究,以及溅射腐蚀对寿命的影响研究。
(4)空心阴极长寿命设计。阴极技术研究主要是对钡钨空心阴极和六硼化镧阴极的应用研究。目前,浸渍钡钨空心阴极的研究已经有一定的基础,但要根据新的工作条件要求进行阴极结构改进,增强发射体抗离子的轰击能力,以提高阴极的可靠性及寿命。六硼化镧阴极具有发射能力适中、溅射率低、抗中毒能力强、能长期暴露在大气中和寿命长的优点,但是其工作温度高,会给加热器带来不利影响,要在工程上应用,须进一步通过工艺优化及试验验证来保证阴极的长寿命要求。同时,还要仿真研究空心阴极内部放电规律,掌握多种工况下阴极电子的发射规律。
4.2.2 霍尔电推进技术
(1)多任务模式设计。霍尔电推进多任务模式是在保持总功率不变的前提下,通过调整推力和比冲来实现的。其技术实现途径为:通过双极化设计分离出电离级和加速级,或者改变放电室的设计,也可以提高电源处理单元的输出效率。从技术上来说,霍尔推进系统比离子推进系统更容易适应大功率工况,未来可为10 千瓦级的卫星提供6~7kW的功率(单台)。
(2)磁聚焦优化技术。磁路和磁场拓扑设计是推力器实现高性能的关键,要针对推力器特定工作条件下的磁场形状和强度要求进行优化(包括优化放电电压),以更好地实现磁聚焦来提高效率。另外,电推力器非正常工作情况下的磁场设计,将是电推力器设计中的又一个难题。
(3)电离分布控制技术。要实现霍尔推力器的多任务模式输出,就要总体设计磁场构型,以达到在一定供气流量范围内实现较小的低频振荡、最优的放电电压和磁场梯度。
(4)阴极技术。阴极的长寿命设计技术是电推进的共性问题。
(5)壁面材料优化。磁通道材料要具有较高的二次电子发射特性,且绝缘,还应有较强的抗离子溅射侵蚀能力,并在高温下导电。因此,应开展相应的抗等离子体侵蚀性能评估及热物理性能测试等研究。
4.3 可变功率电源转换及控制技术
大功率电源处理单元内部含有多路功率电源,包含高压大功率恒压源、大功率恒流源和脉冲点火电源等,结构异常复杂。因此,大功率电源需要攻关的项目包括:适应大功率拓扑结构、动态响应快的反馈隔离技术,输入输出滤波技术,高压绝缘处理技术,大功率电源的反馈控制技术,不同电源的合成技术,以及电源处理单元的备份等。
4.4 流量控制技术
流量控制技术的主要难点是微小流量控制,包括控制精度及系统多余物的控制。控制精度受限于流量控制器温度遥测采集精度,同时反馈控制算法受限于硬件系统设计。在多余物控制方面,电推进为微小流量输出,多余物敏感需求度高。目前执行的洁净度控制,对直径小于5μm 的粒子通常不作要求,但电推进流量控制器的毫克级流量控制,要求缝隙尺寸为2~10μm,5μm 以下的粒子有可能污染到产品。因此,多余物高度敏感需求就要求产品具有较高的过滤精度,或者通过“迷宫”设计降低流量控制器对多余物的敏感度。此外,可变流量调节技术还要解决温度遥测采集精度和控制精度等问题。
4.5 多自由度、大角度矢量调节技术
矢量调节机构的多自由度、宽范围调整能力,是保证电推进系统多任务模式工作的必要条件。目前,国际通用机构多数以步进电机+谐波齿轮的传动方式,测角要采取旋转变压器或者光学编码器提高控制精度,同时增加硬机械限位设计避免超调。电推进应用的矢量调节机构,一般具有分辨率高、测角精度高、输出力矩大和承载能力强等特点,并且摆动范围可通过机械限位设计进行调整,可满足电推进对摆动角度、分辨率、负载能力的需求。目前,在工程应用上应重点解决冗余轻型化设计,多任务模式需求的大范围锥角调整能力设计(不低于90°),以及记忆合金低冲击解锁分离技术等。
4.6 地面测试验证及诊断技术
从系统集成、性能评估和整星兼容性三方面开展测试验证及诊断,进行全面、充分的验证。具体的地面测试验证及诊断技术包括:电推进系统整星试验技术;电推进羽流测试及在轨诊断技术;电推进微小流量测试与标定技术;电推进系统联试模拟器技术;电推进系统电磁兼容性测试技术;电推进系统集成测试技术;电推进地面微小推力及微小冲量测量技术;推力器放电室等离子体诊断技术;推力器推力在轨实时非接触测量技术;电推进系统可靠性试验评价技术;系统寿命试验与预测技术。
5 结束语
电推进系统在长寿命GEO 卫星上的应用已经成熟,而且显示出巨大的经济利益,成为衡量卫星先进性的一个重要指标。从高轨卫星电推进应用需求出发,未来电推进技术要突破解决多任务模式电推进技术、小推力变轨策略、电推进大功率电源变换和管理等关键技术,研究形成新型多任务模式电推进系统,支持全电推进及后续新型高轨机动卫星平台的转移轨道变轨、位置保持及姿态调整等多种任务,可为大幅提高卫星的性能提供技术储备。
(References)
[1]Staff Writers.Aerojet’s high-power hall system propels USAF AEHF satellite[Z/OL].[2013-06-12].http://www.space-travel.com/reports/Aerojet_High_Power_Hall_System_Propels_USAF_AE,HF_Satellite_999.html
[2]Richard R Hofer,Thomas M Randolph,David Y Oh,et al.Evaluation of a 4.5kW,commercial hall thruster system for NASA science missions,AIAA-2006-4469[C]//Proceedings of the 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit.Washington D.C.:AIAA,2006
[3]Boeing Satellite Systems Company.XIPS:the latest thrust in propulsion technology[EB/OL].[2013-06-12].http://www.boeing.com/defense-space/space/bss/factsheets/xips/xips.html.
[4]John R Beattie.XIPS keeps satellites on track[J].The Industrial Physicist,1998,4(2)
[5]Ronald L Corey,David J Pidgeon.Electric propulsion at Space System/Loral,IEPC-2009-270 [C]//Proceedings of the 31st International Electric Propulsion Conference.IEPC,2009
[6]J Gonzalez del Amo,G Saccoccia.Electric propulsion activities at ESA,IEPC-2009-237[C]//Proceedings of the 31st International Electric Propulsion Conference.IEPC,2009
[7]Semenkin A V.Overview of electric propulsion activity in Russia,IEPC-2007-275[C]//Proceedings of the 30th International Electric Propulsion Conference.IEPC,2007
[8]Franck Darnon,Denis Arrat.Overview of electric propulsion activities in France[C]//Proceedings of the 29th International Electric Propulsion Conference.IEPC,2005
[9]David Y Oh.Analytic optimization of mixed chemicalelectric orbit raising missions,IEPC-01-173[C]//Proceedings of the 26th International Electric Propulsion Conference.IEPC,2001
[10]Laurie M.Design of a hybrid chemical/electric propulsion orbital transfer vehicle[J].Journal of Spacecraft and Rockets,2002,39(1):131-139
