高速铁路长波不平顺的相对测量整道
2014-12-25朱洪涛吴维军
魏 晖,朱洪涛,吴维军,王 群,龚 杰
(1.南昌大学 机电工程学院,江西 南昌 330031;2.江西科技学院汽车工程学院,江西南昌 330098;3.江西日月明铁道设备开发有限公司,江西南昌 330029;4.南昌铁路局九江桥工段,江西九江 332000)
高速铁路要求其轨道结构必须具备高平顺性[1],不仅体现在对10和20 m轨向、高低、轨距、水平等常规轨道几何参数的严格控制,而且对钢轨平直度,与轨头表面状态有关的短波不平顺,与桥梁、道床、路基变形和轨道铺设精度直接相关的中长波不平顺幅值的控制亦十分严格。
对于长波不平顺的控制,目前我国主要是通过动态检测发现长波不平顺的大概位置[2],然后进行精确测量,获得轨道在高程及平面的偏差,最后通过大机作业恢复线路技术状态。由于涉及轨道外部几何尺寸的测量,故轨道的精确测量效率不高,且环境适应性较差,仅适用于轨道周期检修。另外,由于轨道测量仪的绝对测量要依据CPⅢ网,当CPⅢ网受到破坏,测量仪常难以获得高质量的数据。
本文利用具备70 m长波功能的0级轨道检查仪指导高铁有砟轨道的经常保养,通过合理的工艺设计,有效保证轨道高平顺性,为高铁有砟轨道的长波控制提供新的思路。
1 长波不平顺及其测量
1.1 长波不平顺
依据波长范围,不平顺可分为短波、中波和长波不平顺。其中,波长在30~200 m的不平顺称之为长波不平顺[1,3]。车体都有自振(固有)频率,当列车以速度v运行时,可能使列车产生共振的线路不平顺最不利波长 l=v/(3.6f)[4-5]。其中,v为行车速度,km/h;f为车体横向自振频率,Hz。通过对车辆—轨道耦合系统空间耦合模型输入轨道随机激扰进行数值仿真可知[3,6],车体横向和垂向加速度表现为1 ~2 Hz的低频振动,横向主频较垂向低。不同行车速度下谐波不平顺最不利波长如表1所示,可知如保证高铁的高平顺性,需关注60~120 m间的长波不平顺。

表1 不同行车速度下谐波不平顺最不利波长 m
1.2 长波不平顺的测量
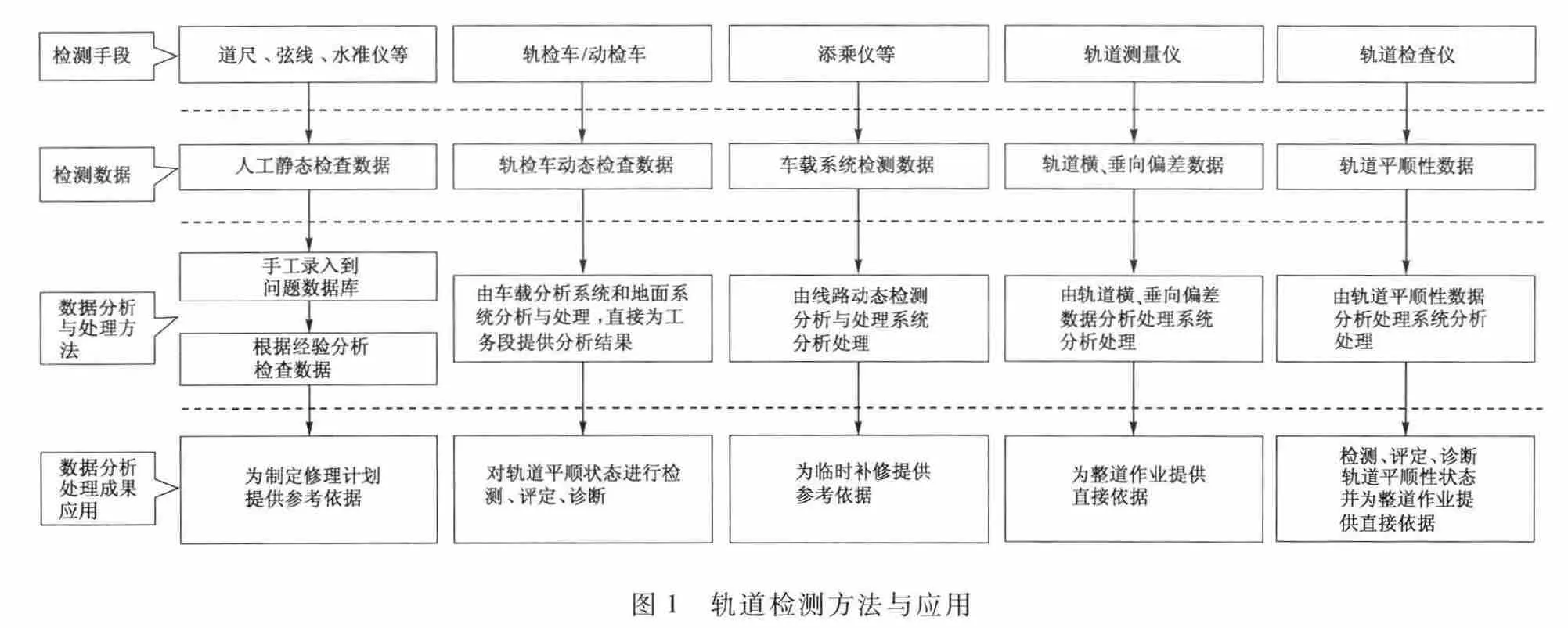
目前,应用于高铁的平顺性检测技术依据有无轮载,可分为动态检测[1,7-8]与静态检测[1,9]两类。其中,动态检测设备主要包括轨检车、动检车以及添乘仪等,而静态检测设备除手工设备外,还包括轨道检查仪以及轨道测量仪等自动化设备(图1)。由于动态检测方式对正常运营影响小、效率高、速度快,且真实地反映了在列车运行条件下的基础设施状态,已经成为高速铁路平顺性状态的主要检测手段。然而,动态检测装备的购置与使用成本高,尚无法做到高铁线路的全覆盖。另外,困扰动检在工务养护中应用的另一个重要原因是,其病害里程的准确标识与病害幅值的现场核实均较为困难[7,10]。因此,动态检测与静态检测之间,应为互补而非替代关系。目前轨道检测形成了“动态检查为主,动、静态检查相结合”的格局。
手工手段检测长波不平顺将会非常困难,且严重依赖技术人员的经验与技术水平。而以轨道测量仪为基础的绝对测量技术虽可测量长波,但如前所述其效率与经常保养作业要求间存在严重的不匹配。
2 0级轨道检查仪及其相对测量直接调轨技术
2.1 0级轨道检查仪
轨道检查仪[11]采用电子、传感技术移动测量并自动记录轨道内部几何参数,包括10 m和20 m轨向(正矢)、高低、轨距、轨距变化率、水平、扭曲(三角坑)等短波不平顺,以及70 m、5 m/30 m校核、150 m/300 m校核轨向、高低等长波不平顺,用于评价新建铁路或运营线路的轨道几何状态,报告超限处所与超限量值。
新修订的行业标准对轨道检查仪进行了分级,新增了适用于≤350 km/h线路的0级轨道检查仪,将过去使用的轨道检查仪定义为1级轨道检查仪并规定其使用于≤200 km/h线路。其中,GJY-T-EBJ-3型0级轨道检查仪相对于1级轨道检查仪除精度升级外,更针对线路运营养护维修,开发了“轨枕定位+长波精测+图上作业(图上划撬)”的功能组合,在此基础上实现了相对测量直接调轨。
2.2 相对测量直接调轨技术
相对测量直接调轨技术是以轨道内部几何形位控制为主导的整道技术。该技术以具备长波精测功能的0级轨道检查仪为技术平台,以轨道平顺性为控制对象,采用惯性轨迹原理,通过图上作业,直接依据轨道检查仪的测量成果进行整道作业。其主要特点:
1)采用轨枕标记功能将轨道病害及调整量与轨枕对应,可有效克服夜间作业定位不准的问题。
2)采用图上划撬,作业效果实时显示,故可以做到先评价后实施。
3)通过长波精测,可以有效找到线路病害原因,且整道方案的制定基于长波信息,可整体优化轨道平顺性。
4)对控制网及光照条件无要求,测量效率高,适应性强。
3 基于相对测量直接调轨的长波不平顺整道工艺
3.1 轨道长波不平顺整道流程
轨道长波不平顺的整道基本流程与轨道的经常保养基本类似,大致包含动态测量数据分析、确定病害地点、现场静态测量确认、检测资料综合分析、制定作业方案、作业方案审批、上报日天窗作业计划、作业方案实施、作业质量回检以及填写作业日志等步骤,具体如图2所示。
轨道长波不平顺整道工艺过程是指采用相应的整道方法作用于轨道,使其平顺性符合作业标准的全部劳动过程。现有的长波整道工艺[2]主要问题在于效率不匹配,而夜间短天窗更加剧了这种不匹配。本文围绕作业效率问题介绍基于相对测量直接调轨的轨道长波不平顺整道的轨道测量与内业处理工艺要点。
3.2 轨道长波不平顺的快速测量
0级轨检仪采用惯性基准测量轨道的平顺性,测量速度通常为4 km/h,测量效率远高于绝对测量。为确保测量精度,长波整道时应采用长波精测模式,综合测量速度可达2 km/h。从图2可知,动检波形是确定轨道长波静态精确测量的位置和范围的依据。设动检里程误差±100 m,而长波平顺性的起终算距离各35 m,并应在两端预留不小于35 m的观测范围,因此长波静态精确测量范围通常不小于500 m。这样,轨道的长波不平顺测量可在30 min内完成,具有显著的效率优势。具体测量流程如图3所示。由于采用了轨枕定位技术与长波精测模式,在进行相对测量时应注意:

图2 线路设备整道流程

图3 轨道长波不平顺的快速测量流程
1)作业前,输入曲线参数并编制轨枕号列表文件。轨枕编号规则应唯一且便于现场查找,而轨枕列表应能体现道岔、隧道、桥梁上轨枕间距的不同。
2)在测量起点和终点时需打轨枕标记,在轨枕间距设计值发生变化时,须在对应位置增打轨枕标记以提高定位精度。
3)检测速度保持在4 km/h左右,测量距离在保证覆盖可能的病害区域的基础上考虑搭接和动检的里程误差。
4)长波测量曲线时,需对直缓点、缓圆点、圆缓点、缓直点等4大桩点增打标记,以便数据分析时修正线形参数。
5)长波回程,选择长波精测模式,掉头匀速回拉,在测量起始点结束。
3.3 轨道长波不平顺的相对测量直接调轨
长波精测数据可用于相对测量直接调轨[12],为保证整道效果,应规范内业作业流程,如图4所示。
相对测量直接调轨内业要点:
1)数据特征辨读应结合动、静态波形,初步判定病害处所、类型;数据特征辨读顺序为长波→中波→短波;着重分析轨道的长波不平顺、多波连续不平顺以及逆向复合不平顺。
2)图上作业亦应遵循长波→中波→短波的顺序;制定作业方案时应考虑天窗时间及作业能力的限制。

图4 相对测量直接调轨作业流程
3)对于无砟轨道,可进行常规意义上的削峰填谷,但调整幅度受扣件系统的限制。对有砟轨道,高包无法直接通过落道削峰,只能通过抬道进行填谷并辅以顺坡予以消除。
4)在无大机配合的条件下,对于长洼往往只能采用变化率控制方案,如起洼中洼。
4 长波不平顺整治现场试用
为验证0级轨检仪指导轨道经常保养的效果,于2013年8月在某城际铁路进行了长波不平顺整道规模试用。选用GJY-T-EBJ-3型0级轨道检查仪进行轨道精密测量,选用HSRailwayCHK XP(Ver 12.1.7)轨道几何状态检查数据分析处理系统制定整道方案。
线路设计时速250 km/h,全线为有砟超长无缝线路。选取动检不良处所27处,利用0级轨道检查仪进行精密测量,采用相对测量直接调轨技术对其中9处制定方案并整道。现场试用显示,其外业作业可控制在30 min内完成,而内业作业时间一般为20 min,回检可安排在作业后立即进行;而其轨枕定位功能的应用,可有效减少病害定位等辅助作业时间,进一步提高作业效率。整道效果通过静态回检与动态检查予以确认,结果显示9处均较为明显地削峰。其中,下行K25+200—K25+700高低70 m长波整道效果对比如图5所示。
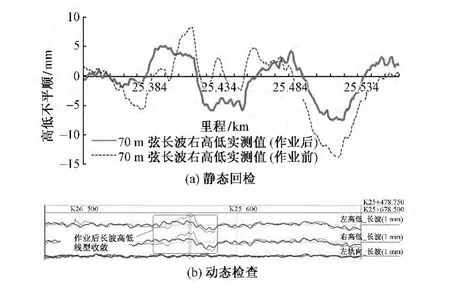
图5 K25+200—K25+700高低70 m长波整道效果对比
由图5可知,作业前轨检车动检长波高低3~-3 mm,0级轨道检查仪静态精密测量显示K25+415处70 m弦长波高低最大值8.33 mm,K25+521处70 m弦长波高低最小值-13.18 mm。通过相对测量直接调轨技术制定方案并实施,回检显示,线路长波不平顺削峰。其中K25+415处70 m弦长波高低收敛为3.11 mm,K25+512处70 m弦长波高低最小值收敛为-7.27 mm。同里程轨检车动态检查显示作业后无添乘出分,起道作业前高低5 mm,作业后高低2 mm,削峰效果明显。
5 结语
目前的长波整道是以绝对测量为基础的,通过控制外部几何尺寸间接控制轨道的平顺性。本文从长波不平顺的测量技术现状出发,介绍了基于0级轨道检查仪以及相对测量直接调轨,并将其应用于长波整道。结论如下:
1)借助0级轨道检查仪的“轨枕定位+长波精测+图上作业(图上划撬)”的功能组合,可以实现基于相对测量的直接调轨。在此基础上,规范了调轨操作的工艺流程。
2)现场规模试用证明,该方法测量效率高、环境适应性好,适合于高速铁路的经常保养。
[1]罗林,张格明,吴旺青,等.轮轨系统轨道平顺状态的控制[M].北京:中国铁道出版社,2006.
[2]李光林,张新奎,朱利民.提速200 km/h线路长波长不平顺的养护维修技术[J].铁道建筑,2007(4):101-102.
[3]高建敏,翟婉明,王开云.高速行车条件下轨道几何不平顺敏感波长研究[J].铁道学报,2012,34(7):83-88.
[4]卢祖文.高速铁路轨道技术综述[J].铁道工程学报,2007,24(1):41-54.
[5]MIURA S,TAKAI H,UCHIDA M,et al.The mechanism of railway tracks[J].Japan Railway & Transport Review,1998(3):38-45.
[6]陈果,翟婉明,左洪福.车辆—轨道耦合系统随机振动响应特性分析[J].交通运输工程学报,2001,1(1):13-16.
[7]赵国堂.轨检车技术现状与发展[M].北京:中国铁道出版社,2001.
[8]余祖俊.轨道交通线路几何安全状态动态检测技术研究[D].北京:北京交通大学,2008.
[9]蔡军.基于光纤陀螺仪的轨道方向不平顺检测系统的研究[D].南昌:南昌大学,2007.
[10]魏晖,吴仕凤,朱洪涛.基于相对测量调轨的高铁有砟线路整道技术研究[J].铁道标准设计,2013(8):11-14.
[11]中华人民共和国铁道部.TB/T 3147—2012 轨道检查仪[S].北京:中国铁道出版社,2012.