平面测量技术在铅球项目中的应用研究
2014-12-25宋婉娟
张 剑 宋婉娟
(1.武汉体育学院体育工程与信息技术学院,湖北 武汉430079;2.湖北第二师范学院计算机学院,湖北 武汉430079)
0 引言
随着计算机处理能力的提高和传感器技术的发展,近年来基于视频图像处理的计算机视觉技术已成为图像处理领域的研究热点,该技术在众多的领域中都有十分广泛的应用[1]。
视觉是人类认识世界、观察世界的重要手段。人类从外界获取的信息量约有75%来自视觉系统,这表明视觉信息量十分巨大以及人类对视觉信息有较高的利用率。人类利用视觉的过程可看作是一个从感觉到知觉的复杂过程,即从感受到的对三维世界的投影图像到依据投影图像去认知三维世界的内容和含义[2]。
计算机视觉技术是指利用计算机实现人的视觉功能,既对客观世界的三维场景的识别、感知和理解。该技术包括是仿生学方法及工程方法,仿生学方法是模仿人类视觉功能的结构及原理,建立相应的处理系统,完成类似的工作和功能;工程方法是从分析人类视觉系统着手,并采用任何现有的可行手段实现人类视觉系统的功能[3],该方法的特点是只关心系统的输入和输出。计算机视觉的主要研究目标是建成计算机视觉系统,完成各种视觉功能。也就是说,即要能借助各种视觉传感器(如CMOS摄像器件、CCD等)获取现实世界的图像,而感知和恢复3D环境中物体的几何性质、运动情况、姿态结构、相互位置等,并且要对客观场景进行识别、解释、描述、进而做出决断。目前,计算机视觉技术在体育运动中也得到了广泛的应用,利用该技术不仅可以从不同的视角观察运动员的动作,而且能将运动员速度、加速度、所在位置等数据进行量化处理,使体育训练及比赛摆脱依靠传统经验分析及判别的状态,从而进入科学化、数字化的状态,而且还可以完成竞技体育项目的成绩测试[4-5]。
在测试项目中铅球成绩的测量仍采用皮尺丈量法。这种方法存在着三个方面的缺陷,一是皮尺本身具有弹性以及易折叠特性,二是受场地的凹凸不平,三是人为因素影响较大。由于这三方面的作用,故在铅球成绩的测量精确度受到极大的限制。针对这一问题本课题提出了一种基于同视场(铅球场地)测量地平面坐标的单摄像机模型[6-7]。该模型利用透视投影几何关系,对摄像机内部参数进行标定,然后,建立相应的网格匹配数学模型,通过单目CCD摄像机像面坐标,测量铅球落点的地平面坐标[8]。成功的解决了铅球着点测量在双目视觉交汇组合测量存在的死角影响系统的测量范围的问题,另外,单目视觉测量系统也避免了双目视觉系统存在对应特征点匹配问题。
1 平面测量原理

图1 铅球的2D场景坐标系
铅球场地是一个扇形区域(如图1)。假设建立一个如图1的2D场景坐标系,首先要做的事是要确定场地上指定点的真实坐标与采集到的图片的指定点象素坐标之间的对应关系,即要找到这两种坐标系之间的转换关系。而这种转换关系可以用平面测量的相关技术获得。在计算机视觉中,所谓的平面测量,就是从图像中获得2D场景信息。在实际的测量中,我们可以通过在图像上标定一定数量的坐标点来确定图像中场地指定点的象素坐标和真实世界中的指定点的现实坐标之间的单应矩阵。
我们获取一幅2D场景S的图像I,通过S与I之间的N(N>=4)对对应点,就可以确定它们之间的单应矩阵H。
令:

在H的九个元素中,有八个独立比率,即一个单应有八个自由度变量,一个常数1。因此,在H中,往往设置h33=1。

其中,h是矩阵H的向量形式,

于是我们可以得到2N个方程,写成矩阵形式为:

其中
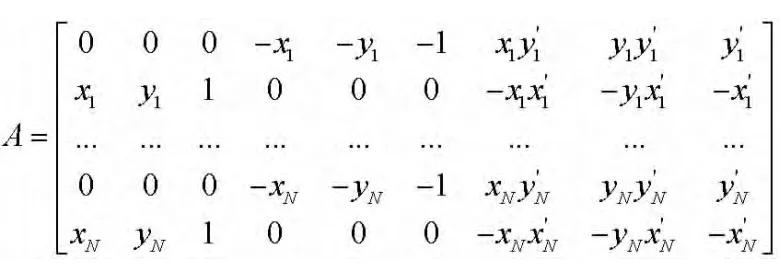
因此,要求得8个参数的单应矩阵,至少需要4个对应点。在实际的测量中,为了提高精度,每个模板平面上提供的对应点数目都会超过4个。
当N>4时,我们可以用奇异值分解法(SVD)[14]求最小二乘解h。求得单应矩阵后,利用公式(2),就可以计算出图像上指定点对应的真实坐标值,从而计算出铅球投掷的距离。
2 实验结果与分析
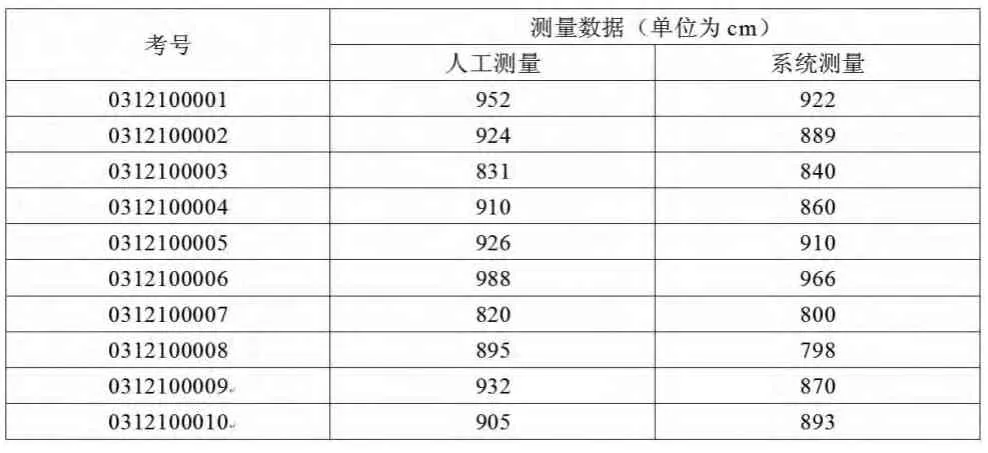
表1
2.1 实验结论
经实际测量的6个标定点(如图1)的坐标分别为A(700,0)、B(900,0)、C(1100,0)、D(570,407)、E(733,523)、F(895,639)。为了测试本文提出的测量模型,在反复测量铅球投掷实验中选取了典型的10个测试样本,其中铅球落点10个。
2.2 误差分析
从表1中我们可以看到人工测量值和系统测量值有一定的误差,分析误差产生的原因有如下几种:
1)数字CCD镜头的光学性能引起的误差,如焦距、畸变和光学中心误差等通过摄像机内部参数校正来解决。
2)摄像机的支架及底座一定要有足够的稳定性和刚度,在视频图像获取过程中应保证摄像机的相对位置稳定不动,由意外情况所造成的误差在计算中应予以剔除。
3)环境的变化将对测量结果产生影响,因此测量中要及时修正背景图像。
4)人工测量本身就会与真实值产生一定的误差。
3 总结
本论文首先介绍了课题背景,对单目视觉测量的研究现状和测量建模在国内外的研究现状进行了分析和归纳,同时分析了视频图像处理技术在体育项目应用现状,将基于单目视频图像处理技术的铅球成绩测量作为切入点,对数字图像处理技术在田径运动中应用的关键技术进行了研究。结合铅球场地的特点,提出一种基于视频图像的铅球测量方法,并通过实际应用证明了该方法的可行性。
[1]Criminisi A,Reid I,Zisserman A.A plane measuring device[J].Image and VisionComputing,1999,17(8),625-634.
[2]Lorenzo Bruzzone,Diego Fernàndez Prieto.Automatic Analysis of the Difference Image for Unsupervised Change Detection[J].IEEE Transactions on Geoscience and Remote Sensing,2000,5,38(3).
[3]L Sajó,Z Ruttkay,A Fazekas.Turk-2,a multi-modal chess player[J].International Journal of Human-Computer Studies,2011,7,69(7-8):483-495.
[4]Lichtenberg,D.B.,Wills,J.G.,Maximizing the range of the shot-put[J].American Journal of Physics,1978,46:546-549.
[5]Maheras,A.V..The relationship between the angle of release and the velocity of release in the shot-put,and the application of a theoretical model to estimate the optimum angle of release(throwing)[D].University of Kansas.,1995.
[6]Antonio Plaza,Jon Atli Benediktsson,Joseph W.Boardman.Recent advances in techniques for hyperspectral image processing[J].Remote Sensing of Environment,2009,9,113(1):S110-S112.
[7]Cynthia Matuszek,Brian Mayton,Roberto Aimi.Gambit:An Autonomous Chess-Playing Robotic System[C]//International Conference on Robotics and Automation(ICRA).2011.
[8]Liu J.,Tong X.,Li W.,Wang T.,Zhang Y.,Wang H.,Yang B.,Sun L.,Yang S..Automatic player detection,labeling and tracking in broadcast soccer video[J].Pattern Recognition Letters,2009,30(2):103-113.
