基于车速及装载变化的纯电动客车操纵稳定性分析
2014-12-23刘文光张中帆
游 专,何 仁,刘文光,张中帆
(1.江苏大学汽车与交通工程学院,江苏镇江212013;2.淮安信息职业技术学院汽车工程系,江苏淮安223003;3.常隆客车有限公司,江苏无锡214432)
汽车操纵稳定性是影响汽车主动安全性的重要因素之一[1],一直是汽车工程领域研究热点.为了改善转向性能、增强操纵稳定性和提高安全性,国内外学者构建多种转向模型,对汽车的操纵稳定性进行研究[2-6],取得了大量的研究成果:文献[2]研究转向输入参数对汽车操纵稳定性的影响;文献[3]考虑前轮转向速度对操纵稳定性的影响,推导出前轮转角输入与相应输出之间的传递函数矩阵,使用传递函数矩阵估计方法对轮胎侧偏特性参数进行辨识和计算;文献[4]研究在不同车速以及前轮转角输入下,纵坡坡度、不同超高以及合成纵坡等不同道路几何参数对汽车操纵稳定性的影响;文献[5]分析可能影响车辆操纵稳定性的主要因素,包括轮胎压力、车辆转向特征、临界转速、轮胎混合装置、重心和轴距等;文献[6]运用多刚体动力学罗伯森-维登堡法充分考虑悬架系统的作用,建立2轴汽车6自由度操纵稳定性模型,得出悬架系统阻尼对操纵稳定性没有任何影响,并运用Hurwitz定理分析汽车的操纵稳定性,得出汽车具有稳定行驶性能的2个必要条件等.
但是,考虑车速和装载质量变化对纯电动客车进行操纵稳定性影响的研究鲜有报道,从动力学角度来说纯电动客车与其他类型车辆相比有较大的区别[7],纯电动客车具有车身长、质心高、迎风面积大、动力电池质量大和侧倾刚度弱等特点,又由于纯电动客车空载和满载质量相差较大,质心随装载质量的不同发生移动,同时随着车速和行驶工况动态改变,左右、前后方向的载荷转移大,这些都会引起轮胎侧偏刚度的改变,从而影响操纵稳定性.具有空载转向不足的客车,加载后会变得有过多转向.笔者在汽车操纵稳定性实车试验和研究中也已发现:汽车的横摆角速度增益、侧向加速度和车身侧倾角等响应特性会随速度、装载质量变化而有较大不同.基于此,有必要对车速及装载变化的纯电动客车进行操纵稳定性分析.车辆模型非线性存在于悬架、轮胎等诸多方面,但轮胎非线性是其重要因素之一,为便于论述设计方法,只考虑轮胎模型非线性,建立纯电动客车弯道行驶非线性动态解析模型,应用遗传算法通过试验数据和仿真数据对比,构造适应度函数,对非线性立方轮胎模型的参数进行辨识.通过实车试验验证参数辨识的可行性和转向模型的准确性,最后考虑车速和装载变化对非线性操纵稳定性模型进行横摆角速度增益、侧向加速度和车身侧倾角响应特性等仿真分析.
1 非线性操纵稳定性模型的设计
1.1 纯电动客车弯道行驶模型
构建考虑装载、车速动态变化的纯电动客车弯道行驶非线性动态解析模型,纯电动客车弯道行驶的俯视图和后视图如图1所示.

图1 纯电动客车弯道行驶模型
Oc,Os分别为车辆质心和簧上质量质心,Oxyz为固定于车辆质心的车辆车标系,原点O和Oc重合;下标f,r分别表示前轴和后轴,o,i分别表示外轮和内轮;αf,αr,β为前、后轴中心与质心处侧偏角,rad;ψ为车辆相对于地面固定坐标系O'x'y'内Ox轴的横摆角(汽车航向角),rad;φ为簧上质量的侧倾角,rad;uω,vω为质心前进与侧向速度,m·s-1;v为质心处的速度,m·s-1;m,ms为整车与车辆簧上质量,kg;h,hLy为簧载质量重心高度与风压中心到整车侧倾中心高度之差,m;hcd为车顶离地高度,m;l为轴距,m;lf,lr,eo为前、后轴与风压中心相对于质心的距离,m;δ为前轮转角,rad;A为迎风面积,m2;Fxf,Fxr,Fyf,Fyr为各轮的纵向力与侧向力,N;FLx,FLy,FLz为空气阻力,侧向力与升力,N;Gf,Gr为前、后轴重力,N;Sf,Sr为前、后轮轮距,m;Iz为整车绕z轴的转动惯量,kg·m2;Ix为簧上质量绕x轴的转动惯量,kg·m2;Ixz为簧上质量绕x,z轴的惯性积,kg·m2;Df,Dr分别为前、后悬架侧倾角阻尼;Cf,Cr为前、后侧倾角刚度.
由于转向系与悬架系不是绝对刚性,在侧向力作用下,会出现附加转角,其值与所受的侧向力成正比,在忽略前后轮对附加转角惯性的条件下,附加转角与侧向力之间没有相位差,与轮胎侧偏角同相位.可将附加转角与轮胎侧偏角合在一起看成有效的侧偏角[8].
对沿y轴侧向运动,对绕z轴横摆运动,对簧上质量的侧倾运动,由牛顿第二定律和动量矩定理可得
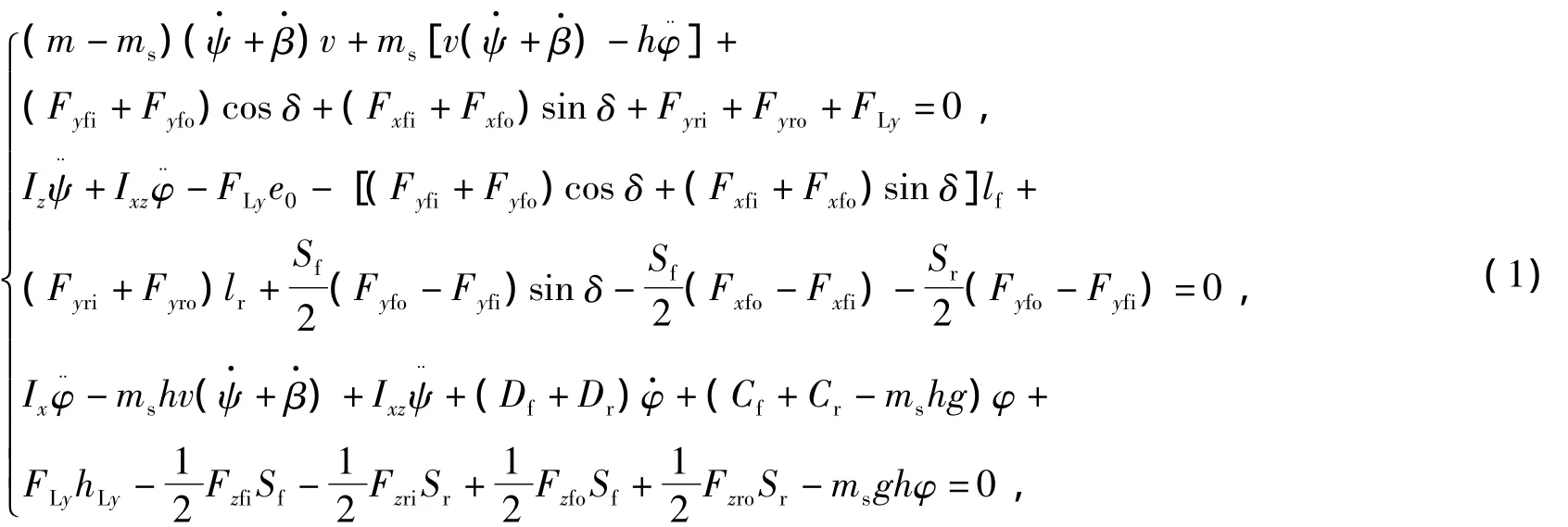
其中:

1.2 装载质量变化引起的参数变化
纯电动客车动力电池质量大、装载质量变化也很大,弯道行驶时,由于侧倾力矩的作用,垂直载荷在左右轮胎上重新分配,从而影响轮胎的侧偏特性,导致汽车稳态响应发生变化.因此必须建立准确的轮胎垂直载荷变化模型,才能更符合实际情况.受侧倾影响,轮胎垂直载荷的数学模型为

装载质量的变化,引起Ix,Ixz,Iz的变化.计算惯性积Ixz采用半经验公式为

计算转动惯量Ix,Iz的估计公式参考文献[9].这些公式是在测量和分析了313辆汽车的转动惯量后得到的,车辆包括104辆轿车、84辆通用车辆、82辆客货两用车和43辆厢式货车.由于车辆取样多,估计公式有很好的准确性[10].
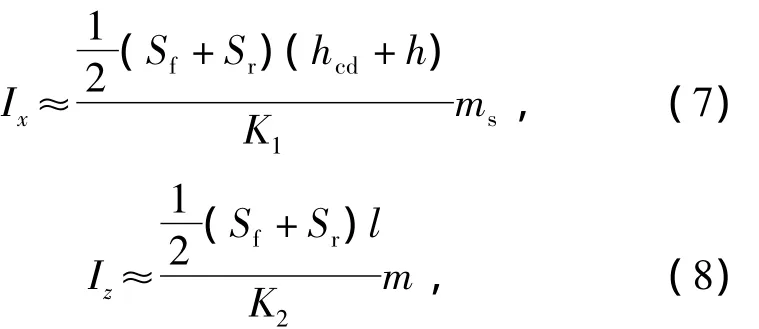
式中K1,K2见表1.

表1 近似值常数K1,K2和误差
1.3 非线性轮胎模型
文献[11-12]基于非线性立方轮胎模型建立车辆转向非线性模型,并分别应用于分叉特性研究[11]和混沌同步控制[12],均取得了较好的效果,文中采用此轮胎模型,侧向力Fyf,Fyr分别为

式中k11,k21和k12,k22分别为前轴和后轴非线性立方轮胎模型的定常参数,由辨识得到.
研究的客车前轮为单胎,后轮为双胎,将下式:

代入式(9),并考虑到高速小角度转向,为了不引起不规则的外推,忽略β和δ高于二次方的项及其乘积项,可得

2 轮胎模型的参数辨识
2.1 遗传算法参数辨识
由于不同客车使用的轮胎存在差别,且轮胎模型先验知识不完备,对整车模型的计算精度造成影响.为了建立高精度的模型,可以对能精确描述的环节建模,而根据试验数据对轮胎等难以精确描述的环节进行辨识.采用遗传算法对k11,k21和k12,k22进行辨识[13].
采用二进制的编码方式,通过对比仿真数据和试验数据,建立的轮胎模型适应度函数[14]为

式中:n为试验数据点个数;和分别为通过仿真和试验得到的侧向力大小;和分别为试验数据中最大和最小侧向力.
按如下公式调整交叉、变异概率:

式中:kj1,kj2,kb1,kb2为常数;Pj为交叉概率;Pb为变异概率;f'为要交叉的2个个体中较大的适应度值;fb为要变异个体的适应度值;favg个体平均适应度值[15-16].
2.2 参数辨识结果
试验车为江苏江阴常隆客车有限公司马可牌YS6120DG纯电动客车,轮胎为米其林XZU3(无内胎),规格为275/70R22.5.转向器为沙市久隆动力转向器 D56,传动比i1为23,则轮转角 δ=θ/i1,θ为转向盘转角,该车的其余相关参数:空载m=11 000 kg;空载ms=8 200 kg;匹配电池质量为1 500 kg;满载m=18 500 kg;l=6.1 m;hLy=1.5 m;hcd=2.88 m;A=7.95 m2;CLx=0.7;CLy=1.2;e0=0.6 m;CLzf=0.6;CLzr=0.3;Sf=2.101 m;Sr=1.860 m;Df=113 000;Dr=113 000;Cf=490 000;Cr=490 000;hf=0.478 m;hr=0.478 m.
设定初始群大小为50,最大遗传代数为1 000代,替换概率为 0.8,交叉概率为 0.8,变异概率为0.2.速度v、侧倾角φ、前横摆角速度˙ψ、转向盘转角θ及侧向加速度v(˙β+˙ψ)都可观测得到,试验车空载,速度为80 km·h-1时,数据采样间隔为0.01 s,采集的一组观测数据如图2所示.

图2 一组观测数据
根据上面建立的模型公式和辨识方法,确定辨识后的值:k11=-7 984.36;k21=-8 106.25;k12=1 508.13;k22=1 682.76.
3 模型验证与仿真
3.1 模型验证
试验纯电动客车经装载后,整车质量为14 000 kg,速度为50 km·h-1均速行驶,以角输入方向轻轻紧靠转向盘消除自由间隙,经过1 s,以起跃速度不低于200(°)·s-1转动转向盘,使其达到预先选好的位置360°,并保持11 s.横摆角速度和侧向加速度响应曲线的仿真与试验比较图如图3所示,试验值与仿真值吻合较好,说明采用遗传算法对客车操纵稳定性模型进行参数辨识具有很好的可行性,且使用客车非线性动态解析模型进行仿真具有较高的可靠度.

图3 模型验证图
3.2 模型仿真
3.2.1 车速变化的影响
一般情况下,汽车弯道行驶时只制动而不加速,只考虑纯电动客车匀速弯道行驶和弯道制动行驶2种工况下,车速变化的影响.仿真初始条件为客车空载、转向盘角阶跃输入为1.5 rad·s-1,起跃时间为1 s,转角达到后不再变化,整个仿真过程为12 s.
在匀减速、匀速工况下仿真所得的横摆角速度增益、侧向加速度曲线如图4所示.从图4b的横摆角速度增益曲线可以看出:横摆角速度上升速度很快,并很快达到最大值.匀速工况,在转向盘角不再上升之后,横摆角速度快速接近稳态值,几乎没有振荡.初速度同为80 km·h-1时,匀速无超调,匀减速有超调,且减速度越大,过振幅量越大,增益值越大.这说明,减速与均速相比,由于减速时正的纵向惯性力使后轴负荷向前轴转移,导致前轴侧偏刚度变大,后轴侧偏刚度变小,故横摆角速度增益增大.且减速度越大,增益会越大,说明客车弯道制动行驶随加速度增大,瞬态响应变灵敏,这时驾驶员无意识所做的轻微的转向盘转动都会引起很大的响应,操纵稳定性变差.同时加速度同为-3 m·s-2,80 km·h-1的初始速度与60 km·h-1的初始速度相比横摆角速度增益大,转向灵敏度高,说明初速越低,客车弯道制动越安全.
图4c与图4b相比,上升速度较慢,且超调量较少.最大侧向加速度均未超过0.4g,即轮胎侧偏特性在线性区域内,说明在这几种车速情况下客车弯道行驶比较安全.速度变化对横摆角速度和侧向加速度影响具有同一性,不再赘述.

图4 减速、均速工况横摆角速度增益、侧向加速度曲线
3.2.2 装载变化的影响
仿真初始条件为0 s时,转向盘角阶跃输入为1.5 rad·s-1,转角达到后不再变化.以70 km·h-1匀速行驶整个仿真过程12 s.仿真中前后轴质量、质心位置如表2所示.

表2 前后轴质量、质心位置
考虑装载变化仿真所得的横摆角速度增益、车身侧倾角如图5所示.分析表明:随质量增加,质心高度增加,横摆增益下降,即装载质量越大,横摆角速度和侧倾角的峰值时间几乎不随装载质量变化;超调量随着装载质量的增加均增加;横摆角速度的稳态值随着装载质量的增加而减小,转向响应灵敏性越差;侧倾角的稳态值随着装载质量的增加而增大,加大了侧翻的可能性.

图5 装载变化横摆角速度增益、车身侧倾角曲线
4 结论
考虑了车速与装载变化对纯电动客车操纵稳定性的影响,构建了纯电动客车弯道行驶非线性动态解析模型.建立了轮胎侧向力与质心侧偏角、横摆角速度之间的关系式,采用遗传算法对非线性立方轮胎模型的未知参数进行了辨识,并通过实车试验验证参数辨识的可行性和整车弯道行驶非线性解析模型的准确性.转向盘角阶跃输入下,仿真计算了纯电动客车减速和均速工况下,横摆角速度增益和侧向加速度的响应,结果表明:客车弯道制动初速度越高,减速度越大,瞬态响应越灵敏,操纵稳定性越差,驾驶员无意识所做的轻微的转向盘转动都会引起很大的响应.同时对3种装载情况进行了仿真计算,结果表明:随着装载质量的增加横摆角速度稳态值减小,转向响应灵敏性变差,侧倾角的稳态值增大,侧翻的可能性加大,驾驶员驾驶不安全感加大.
References)
[1]Abe M,Manning W.Vehicle Handling Dynamics Theory and Application[M].UK:Butterworth Heinemann Publications,2009.
[2]Kim J.Effect of vehicle model on the estimation of lateral vehicle dynamics[J].International Journal of Automotive Technology,2010,11(3):331-337.
[3]刘喜东,刘应东.考虑转向速度的汽车操纵稳定性分析[J].机械工程学报,2011,47(10):95-100.Liu Xidong,Liu Yingdong.Analysis on vehicle handling and stability considering steering velocity[J].Journal of Mechanical Engineering,2011,47(10):95-100.(in Chinese)
[4]游克思,武加恒,孙 璐,等.道路几何参数对车辆操纵稳定性影响[J].公路交通科技,2011,28(10):109-117.You Kesi,Wu Jiaheng,Sun Lu,et al.Influence of road geometry parameters on vehicle handling stability[J].Journal of Highway and Transportation Research and Development,2011,28(10):109-117.(in Chinese)
[5]Xu Shengming.Handling stability analysis of traffic vehicle at high velocity on the bend surface[C]∥Consumer Electronics,Communications and Networks.Piscataway,USA:IEEE,2011:390-393.
[6]刘晋霞,张文明,张国芬.汽车多刚体操纵稳定性模型及稳定性分析[J].北京科技大学学报,2007,29(7):739-743.Liu Jinxia,Zhang Wenming,Zhang Guofen.Automobile rigid multibody handling stability model and its stability analysis[J].Journal of University of Science and Technology Beijing,2007,29(7):739-743.(in Chinese)
[7]Guo Xingdong,Guo Wenlong,Zhang Hao,et al.Analysis of operating vehicle handling and driving stability impact elements[C]∥Advanced Research on ComputerScience and Information Engineering.Berlin:Springer,2011:42-47.
[8]郭孔辉.汽车操纵动力学原理[M].南京:江苏科学技术出版社,2011.
[9]Bixel R A,Heydinger G J,Durisek N J,et al.Developments in vehicle center of gravity and inertial parameter estimation and measurement[C]∥SAE Technical Paper Series.USA:SAE Publication Group,Paper Number:950356.
[10]张 浩.客车操纵稳定性分析及其控制策略研究[D].长春:吉林大学汽车工程学院,2012.
[11]Dai L,Han Q.Stability and Hopf bifurcation of a nonlinear model for a four-wheel-steering vehicle system[J].Communications in Nonlinear Science and Numerical Simulation,2004,9(3):331-341.
[12]Shun Changchang.Synchronization in a steer-by-wire vehicle dynamic system[J].International Journal of Engineering Science,2007,45:628-643.
[13]刘喜东.大客车EPS助动力矩及控制策略研究[D].西安:长安大学汽车学院,2009.
[14]刘永强,杨绍普,廖英英,等.基于遗传算法的磁流变阻尼器Bouc-Wen模型参数辨识[J].振动与冲击,2011,30(7):261-265.Liu Yongqiang,Yang Shaopu,Liao Yingying,et al.Parameter identification of Bouc-Wen model for MR damper based on genetic algorithm[J].Journal of Vibration and Shock,2011,30(7):261-265.(in Chinese)
[15]马 湧,孙彦广.基于改进遗传算法的蒸汽管网压降系数辨识[J].冶金自动化,2012,36(5):11-14.Ma Yong,Sun Yanguang.Pressure drop coefficient identification of steam network based on improved genetic algorithm [J].Metallurgical Industry Automation,2012,36(5):11-14.(in Chinese)
[16]黄星奕,蒋飞燕,穆丽君,等.基于嗅觉可视化的鲳鱼TVB-N预测模型[J].江苏大学学报:自然科学版,2013,34(1):38-43.Huang Xingyi,Jiang Feiyan,Mu Lijun,et al.Total volatile basic nitrogen prediction models ofPampus argenteusbased on olfaction visualization detection technique[J].Journal of Jiangsu University:Natural Science Edition,2013,34(1):38-43.(in Chinese)
