汽车转向前束研究Ⅲ
2014-12-21吴晓建吴新宇
吴晓建,邱 香,谢 明,吴新宇
(1.江西科技学院汽车工程学院,江西南昌330098;2.重庆理工大学重庆汽车学院,重庆400050)
1 非等转向前束角模型简化解析算法
汽车低匀速转向时,在忽略轮胎的侧偏作用以及离心力对轮胎影响的前提下,阿克曼定理为寻找汽车的转向中心提供了依据,但当转向不满足阿克曼定理,转向中心该如何确定[1-2]?
文献[3]《汽车转向前束研究》介绍了转向前束角的定义以及用于确定汽车低速转向且不满足阿克曼定理时汽车转向中心的方法——非等转向前束法,该方法视转向不汇交的情况等价于加了不相等的转向前束角后的转向汇交情况。该方法除了可用于确定不汇交时的转向中心分布,还可用于转向机构的优化。
根据非等转向前束法的定义,可得到以下方程:
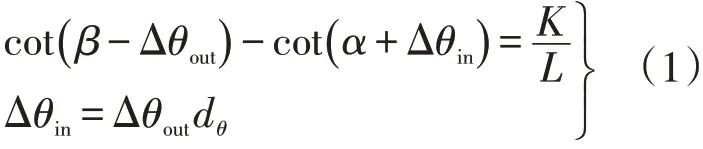
式中:dθ=;B=arctan;α,β为内外转向轮转向角;K为汽车轮距;L为汽车轴距;Δθin,Δθout为内外转向轮的转向前束角,正值代表该转向瞬态为转向正前束(如图1 所示);负值代表该转向瞬态为转向负前束,图1中前轮转向轴线交点G点位于前后轴中间[4-5]。
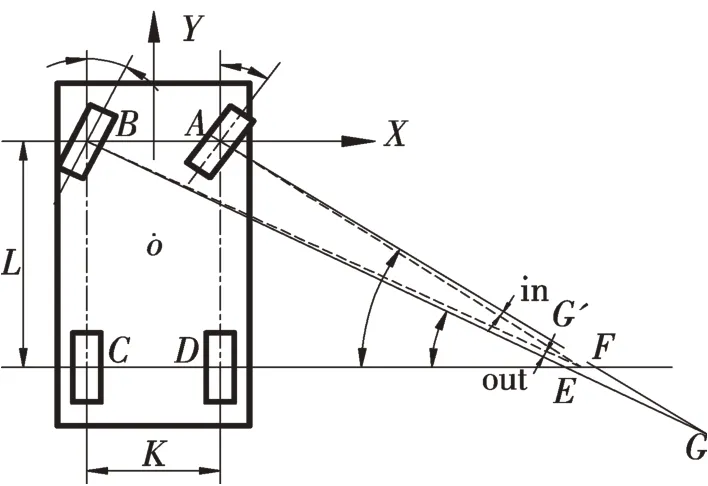
图1 非等转向前束法确定转向中心示意图Fig.1 The schematic diagram of determining steering center by not-equal-steering-toe-in method
由于求内外侧转向轮转向前束角精确值比较复杂,文献4推荐采用数值法求解拟合转向前束角曲线,所用转向机构参数如表1,得到数值法拟合出的转向前束角曲线如图2所示。图中1为等转向前束角曲线,2,3分别为按非等转向前束角模型求解得到的内、外转向轮的转向前束角曲线。
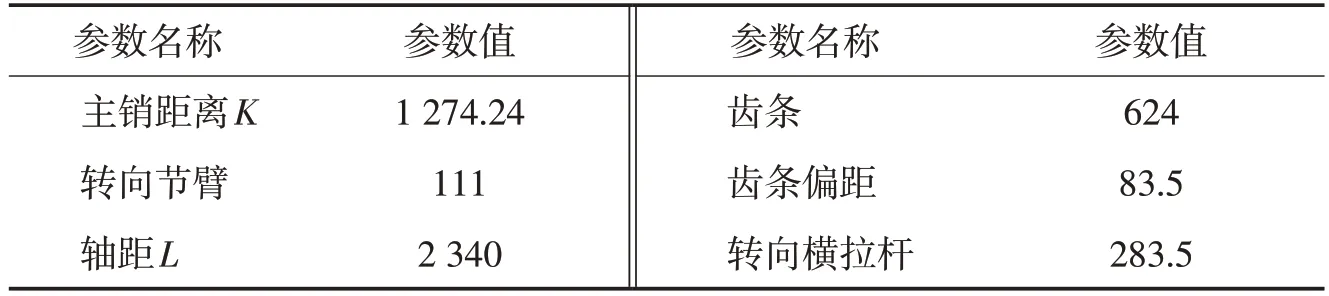
表1 某车转向机构参数表[2]Tab.1 Steering mechanism parameters of a vehicle mm
设按等转向前束角使转向汇交时,转向前束角绝对值为|Δθ|,根据等转向前束角和非等转向前束角定义,三者之间必须满足以下两种关系:
1)Δθin,Δθout,Δθ必须同号(同为正或同为负)。
2)等转向前束角和内外转向轮非等转向前束角必须满足以下关系:

从图2 局部放大视图中可发现|Δθ|,|Δθin|,|Δθout|并不满足上述两种关系,这说明数值拟合方法所得结果会在局部区域出错,主要原因是采用数值算法会出现舍入误差,同时数值很小时,拟合方法本身就难以保证近似计算精度。更加准确的求解结果有利于后续的理论研究及规律探索,为避免出现上述错误,论文推导了转向前束角的解析算法。
图2 数值法求解拟合的转向前束角曲线Fig.2 Numerical method of solving the fitting steering-toe-in angle curve
对(1)进行变形得

从数值计算法计算结果(图2中,转向前束角最大值不到5°)可知Δθin,Δθout值很小,故可视

将(4)(5)带入(3)式,得

(6)式展开得

继续展开得到

忽略(8)式中的高次项,得

联立方程(1),(9)解得
采用表1数据,得到解析法计算的内外转向轮转向前束角曲线,如图3所示。
从图3中局部放大视图可知,计算结果满足公式(2)的要求,可证明采用的解析法能有效避免数值法出现的误差。
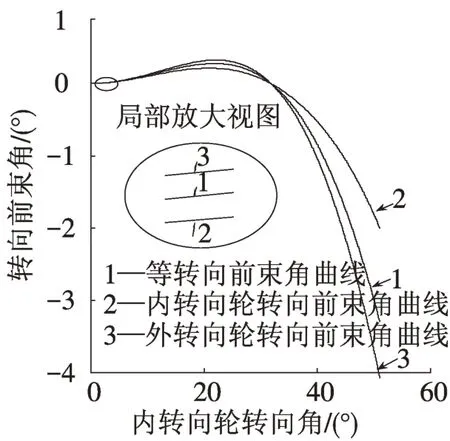
图3 解析算法得到的转向前束角曲线Fig.3 Steering-toe-in angle curve byanalytical algorithm
2 有预加前束角时非等转向前束角计算
预加前束角指汽车直行时内外侧转向轮加的前束角,汽车的预加前束角数值普遍可以通过调节转向横拉杆长度进行调整,设预加前束角为θ0,有了预加前束角后的转向,内外轮转向角分别为

θ0>0,预加的是正前束。θ0<0,预加的是负前束。
根据转向前束角定义,预加前束后转向角仍然满足方程(1)。

由公式(10)可知,预加转向前束角后外侧车轮非等转向前束角为

设汽车直行时有预加2∘的正前束角,即θ0=2∘,采用表1 中的数据,根据公式(13)计算结果,得到有预加前束时的内外转向轮转向前束角曲线,如图4所示。
图4 中:11—无预加前束时,外转向轮转向前束角曲线;12—预加2°正前束时,外转向轮转向前束角曲线;21—无预加前束时,内转向轮转向前束角曲线;22—预加2°正前束时,内转向轮转向前束角曲线;31—无预加前束时,等转向前束角;32—预加2°正前束时,等转向前束角;41—有、无预加前束角的外转向轮转向前束角差值曲线;42—有、无预加前束角的内转向轮转向前束角差值曲线;43—有、无预加前束角的等转向前束角差值曲线。

图4 预加正前束θ0=2∘时内外转向轮转向前束角曲线Fig.4 The steering-toe-in curves of inside and outside steering wheel with 2 degree positive toe-in angle
从图4可知,如果转向不汇交时的转向中心按文献1所述的等转向前束角方法确定,那么有预加前束角时的转向前束角曲线变化规律就等于没有预加前束角时的转向前束角曲线平移一定值,该值恰为预加的前束角值。而事实上,转向不汇交的转向中心应按文献4所述的非等转向前束角方法确定,此时有预加前束角时的转向前束角曲线将不再满足没有预加前束角时的转向前束角曲线平移一定值的规律了。但是,虽然不再满足平移的规律了,却同样可以从图4得出重要结论:有预加前束角后,转向前束角曲线仍会朝一侧偏移(不再是平移)。即如果直行时预加的是正前束,转向前束角代数值会增大,如果直行时预加的是负前束,转向前束角代数值会减小;也可解释为预加了正前束后,转向正前束会加剧,而转向负前束会被减弱;预加了负前束后,转向正前束会减弱,而转向负前束会被加剧。
3 预加前束的作用
预加前束具有使汽车保持直行的能力。
设汽车直行时转向轮预加正前束角为θ0,因预加前束角引起的侧向力f0对左、右侧转向轮主销轴线形成的力矩相等。
当汽车因路面不平或者有侧向风的干扰等原因造成转向轮偏转时,汽车将不再保持直行状态。由于主销有后倾角,当后倾角为正时,主销轴线接地点位于车轮接地点的前方。假如受到干扰后,转向轮由直行状态发生了向左轻微偏转,至图5右侧视图所示状态,这可等价成左右两侧预加了不相等的前束角,因前束角引起的侧向力将不再相等,即图5右侧视图中f1≠f2,这两个力绕各自的主销轴线接地点形成的力矩也将不再相等。图5右侧视图中,因右侧等价前束角θ2>θ1,故f2>f1,f2绕右侧主销接地点B2点的力矩将大于f1绕左侧主销接地点B1的力矩,当干扰消失后,该力矩差将具有使车轮回正至直行状态的功能。
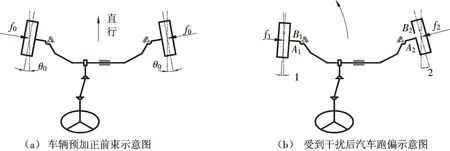
图5 车辆预加正前束及受到干扰后汽车跑偏示意图Fig.5 The schematic diagram of vehicles with positive toe-in and running deviation by disturbance
4 转向正前束的回正作用
图6为转向正前束示意图,fl,fr为左右侧向轮因转向前束而产生的侧向力,根据前面结论可知fl>fr,因而,fl,fr绕主销接地点形成的合力矩将有使转向回正的作用。
前已述及,转向前束的类型可以通过转向前束角的代数符号来判断。图4显示在整个转向过程中,基本上在汽车转向轮前30∘转角范围内,汽车都属于转向正前束;此外,转向前束类型亦可采用软件(例如C++Builder)编译转向模拟程序,对前轮转向中心的轨迹进行动态演示,从前轮转向中心轨迹分布进行判断。
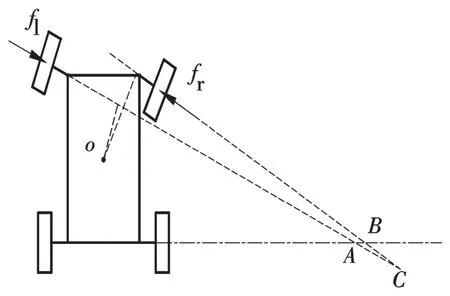
图6 转向正前束示意图Fig.6 The schematic diagram of positive steering-toe-in
综上可知,在汽车的回正转向过程中,大部分回正阶段都属于转向正前束,因而,转向盘的回正也应有转向正前束的贡献。
5 小结
1)针对数值法求解拟合转向前束角值的不足,推导了解析法求解转向前束角值,能更精确求解出任意转向瞬间内外轮转向前束角值,在采用转向前束角作为优化目标时,有利于获得更准确的优化结果。
2)推导了汽车直行有预加前束时转向前束角的求解过程,并结合某车数据,得出了相关结论。
3)分析了汽车有预加前束后,具有使汽车抵抗干扰保持直行的能力。
4)汽车回正过程大部分阶段都属于转向正前束,正的转向前束发挥着一定的回正作用。
[1]屈翔,吴晓建,廖林清,等.汽车转向前束研究[J].机械设计与制造,2011(10):107-109.
[2]吴晓建.齿轮齿条式转向机构转向特性研究[D].重庆:重庆理工大学,2009:51-61.
[3]陈家瑞.汽车构造[M].3版,下册.北京:机械工业出版社,2009:248-249.
[4]吴晓建,邱香,谢明,等.汽车转向前束研究[J].机械设计与制造,2013(5):164-166.
[5]吴晓建,廖林清,谢明,等.转向机构数学模型及转向中心研究[J].四川兵工学报,2008(10):63-65.
[6]黄小平,马履中.转向机构的运动学分析[J].汽车工程,1992(2):27-31.
[7]孙仲铭.前轮前束与前轮跑偏[J].江苏交通科技,1993(5):42-44.
[8]魏道高.汽车前轮定位参数研究与展望[J].合肥工业大学学报,2004(12):1594-1598.
[9]蒋国平,王国林,周孔亢.转向梯形断开点位置对汽车稳态转向特性的影响[J].华东交通大学学报.2006,23(5):125-127.
