带夹持器冬枣分离设备的研制
2014-12-19于复生李腾飞殷盛江孙中国
于复生,李腾飞,殷盛江,孙中国
YU Fu-sheng, LI Teng-fei, YIN Sheng-jiang, SUN Zhong-guo
(山东建筑大学 机电工程学院,济南 250101)
0 引言
我国作为农业大国,现如今越来越重视农业生产的自动化问题,尤其是农产品的自动化分拣问题[1~5]。在工业生产中,自动化分拣已经应用的相当普遍,浙江工业大学丁鹏飞等人完成了大功率LED全自动分拣机的设计[6],张英、李汉军等人也通过光电池的原理和应用研制出了高精度自动化分拣设备[7,8]。
冬枣是人们秋末冬初最常吃的的一种水果。冬枣的外形特点是圆形,大小差别比较大。冬枣在被摘下树时,一般采用抽打的方式,将熟的、生的,大的、小的混在一起,这时就需要将熟枣和生枣,大枣和小枣进行分开,以便出售时获得更好的经济效益。现在,一般需要人工将冬枣的大小、生熟区分开来,劳动强度很大,因此迫切需要一种能够进行自动分拣的设备。根据冬枣生长的大小和成熟状况,本文设计的夹持冬枣的夹持器主要是由电磁铁、连杆、电位器、手指、红色LED和光电池等组成的。夹持器不但可以区分出冬枣的大小,而且还能将冬枣的生熟区分开来。普通夹持器只能夹持固定形状大小的物体,本文设计的带夹持器的冬枣分离设备依据夹持器手指的闭合程度引起的电位器的电阻变化来获取冬枣的大小,并进行分离,依据手指内部安装的红色LED和光电池来进行冬枣的生熟分离。
1 分离装置
8组夹持识别器安装在一个转盘上,每一个夹持识别器(如图1所示)既能实现对冬枣的大小分离又能实现对冬枣的生熟分离。它是通过以下技术方案实现的,电磁铁及连接两个手指底板的轴固定安装在底板上,电磁铁的输出杆与两个联杆通过轴连接在一起,两个联杆分别通过轴与手指底板的后端部连接在一起,两个手指各自通过四根导柱和套在导柱上的弹簧连接在手指底板上,电位器固定安装在一个手指上,电位器的转轴固定连接在另一个手指上,手指上安装有一块线路板,线路板上安装有两个红色LED和一个光电池。

图1 夹持识别器
1.1 夹持识别器的组成及其工作原理
夹持识别器是由底板、电磁铁、联杆、手指底板、电位器、手指、导柱、弹簧、红色LED、光电池组成的。电磁铁及连接两个手指底板的轴固定安装在底板上,电磁铁的输出杆与两个联杆通过轴连接在一起,两个联杆分别通过轴与手指底板的后端部连接在一起,两个手指各自通过四根导柱和套在导柱上的弹簧连接在手指底板上,电位器固定安装在一个手指上,电位器的转轴固定连接在另一个手指上,手指上安装有一块线路板,线路板上安装有两个红色LED和一个光电池。该器件在工作时,电磁铁缩回伸出杆,将手指底板收紧,由于弹簧和手指底板上的导孔使手指只能达到一定的收紧程度而不致挤坏冬枣,此时两个手指的开口程度可通过电位器的电阻获知,同时,读取光电池输出的电流,可测得红色LED照射在冬枣表面上的反光,即可获知冬枣表面的颜色,而冬枣表面的颜色就代表了冬枣的生熟,因而,该器件在夹持的同时即可通过控制检测电路获知所夹持的冬枣的生熟和大小。
1.2 夹持识别器的电路组成
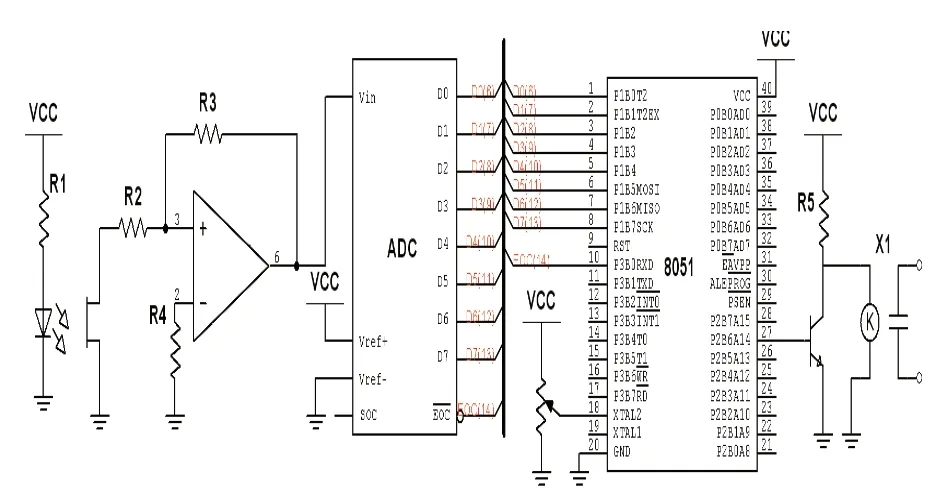
图2 夹持识别器电路图
如图2所示,夹持识别器的电路主要由光电管、同相放大器、8051单片机、滑动变阻器和电磁铁等组成的,它的基本工作原理是,当不同颜色的冬枣被夹持器夹起来以后,根据夹持器上的手指的开口程度,即冬枣的大小,电位器上的电阻产生相应的变化,电位器上的电阻此时等同于一个滑动变阻器,由此获得一个电信号,与此同时夹持识别器上的光电管通过不同的光反射来判断和识别出熟的与生的冬枣,并将其转化成电信号输送给同相放大器,放大器输出的电信号与电位器输出的电信号通过A/D转换后发送给单片机,信号经过8051单片机处理后,单片机发出一个控制信号给电磁铁,电磁铁在得到电信号后,控制手指的张合,将冬枣夹持到相应大小与生熟的枣箱内,8组夹持识别器在电机的带动下同时工作,共同分拣来自振动盘输送的冬枣。
2 带夹持器的冬枣分离设备的总体结构
带夹持器的冬枣分离设备,它是由振动上料盘、夹持识别器、电机、控制器、挡板等主要构件组成的,其他构件被依次安装在工件上。在进行冬枣的分离过程中,设备的进料装置和分离装置同时工作,夹持器同时完成冬枣的大小和生熟分离,设备的整体结构如图3所示。

图3 带夹持器的冬枣分离设备
为了实现冬枣的大小和生熟的自动化分拣,需要稳定可靠的机械系统和控制系统。本文所设计的带夹持器的冬枣分离设备是由振动上料盘、夹持识别器、转盘、枣箱、电机、电机支架、小槽轮、大槽轮、底座、立柱、控制器、挡板组成的。
整个机械系统的安装过程如下:振动上料盘、底座、枣箱都放置在地面上,电机支架安装在底座上,电机安装在电机支架上,间歇机构的小槽轮与电机安装在一起,大槽轮与转盘安装在一起,套装在立柱上,8组夹持识别器安装在转盘的上面,控制器安装在转盘的上部中央位置,挡板安装在转盘上方,与夹持识别器间隔安装,小槽轮与大槽轮构成间歇运动机构。
3 分离装置控制系统的设计
分拣装置的控制指令来自于单片机,单片机接收到模数转换器和电位器传输过来的电压值。当来自模数转换器的电压值≥3V时,此时冬枣别判断为熟枣,反之,冬枣被判定为生枣;来自电位器传输的电压值被划分为三个变化范围,依次为1~2V,2~3V,≥3V,单片机根据这些电压值的取值范围来判断冬枣的大小,同时向电磁铁发出指令,控制夹持手指将冬枣安放到相对应的枣箱内。完成一个处理过程后,再次接收模数转换器和电位器的数据,对下一个冬枣进行处理。具体控制方式如图4所示。
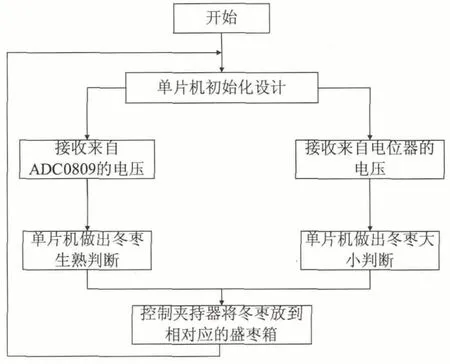
图4 控制系统
4 设备的工作原理
带夹持器冬枣分离设备的工作原理是:冬枣分离前,首先人工将冬枣倾倒在振动上料盘内,给电动机接通电源后,振动盘开始工作,将盘内的冬枣源源不断的输送到转盘上,此时转盘上的8组夹持识别器随着圆盘的转动依次抓取冬枣,抓取完成后随即进行冬枣的大小与生熟的判断,当夹持识别器完成冬枣的大小与生熟的判断后,按照单片机发出的指令将冬枣放入到相对应的盛枣箱内,最终完成冬枣的大小与生熟的分离。
5 主要技术参数
带夹持器冬枣分离设备的主要技术参数包括:电动机的功率、电磁铁的拉力、电磁铁的使用寿命、光电管的功率、工作温度范围等,其性能参数如下:
电动机的功率:1000W;
电磁铁的拉力:10N;
电磁铁的使用寿命:1000000次;
光电管的功率:75mW;
工作温度范围:-20℃~80℃;
夹持器平均夹持速度:10个/分钟。
6 结论
本文设计的带夹持器冬枣分离设备主要是由振动上料盘、夹持识别器、电机、控制器、挡板等主要构件组成的,采用步进电机作为动力源,在电机的带动下,振动盘把冬枣输送到圆盘上,随着圆盘的转动,8组夹持识别器不断夹取圆盘上的冬枣,通过安装在夹持识别器上的光电池和电位器完成冬枣的生熟和大小的识别后,夹持识别器将冬枣放入到圆盘下相对应的盛枣箱内,随即完成了冬枣的生熟和大小的分离。带夹持器冬枣分离设备充分运用光电识别技术和单片机控制技术完成了整个机械系统的自动化分拣,在应用方面,该设备具有操作简便、运行稳定、精度高的特点,能够大量减少人的劳动强度,大大提高了自动化水平。经初步预算,带夹持器冬枣分离设备能够完全满足试验机的要求,且大大提高了工作效率,在农业机械工程中有很大的实用性,有着极为广泛的应用前景。
[1]Agrawal M,Konolige K,Bolles R C.Localization and mapping for autonomous navigation in outdoor terrains:A stereo vision approach[C].IEEE Workshop on Applications of Computer Vision.Piscataway,NJ,USA:IEEE,2007,6p.
[2]Weiss C,Tamimi H,Masselli A,et al.A hybrid approach for vision-based outdoor robot localization using global and local image features[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway,NJ,USA:IEEE,2007:1047-1052.
[3]Bekey G A,Tomovic R,Zeljkovic I.Control architecture for the Belgrade/USC hand[M]//Dextrous robot hands.New York,USA:Springer-Verlag,1990:136-149.
[4]王景川,陈卫东,胡仕煜,张栩.基于近红外视觉的机器人室外定位系统[J].机器人.2010,32(1),97-99.
[5]罗志增,顾培民.一种单电机驱动多指多关节机械手的设计[J].机器人,2009,31(6),620-623.
[6]丁鹏飞,潘建根,沈海平,王万良.大功率LED自动分拣机的设计[J].照明工程学报,2008,19(1),65-67.
[7]张英,张九六,李春,周铭.LED高速高精度自动测试分拣设备[J].中国计量学院学报,2011,22(2),121-123.
[8]李汉军,杨士亮,杨恩智.光电池原理及其应用[J].现代物理知识,2005,11(3),25-27.
