高速数传中定时同步设计与FPGA实现
2014-12-18朱娟娟姚远程秦明伟
朱娟娟,姚远程,秦明伟
(西南科技大学信息工程学院,四川绵阳 621010)
目前,数字通信系统正向高速全数字化方向发展。在全数字接收机定时同步中,主要包括两个关键点:定时误差估计和定时控制。传统的定时同步方法中一般直接调节本地采样时钟以达到采样最佳的效果,而在全数字接收机中,本地采样时钟不变,通过计算定时误差控制产生重采样时钟达到最佳采样。通过产生重采样时钟达到定时同步的方法常用的有Gardner算法和数字滤波平方法。二者同属定时同步中的内插法,对载波信号不敏感,可以先于载波同步进行,差别在于Gardner属于反馈式,而数字滤波平方法属于前馈式,所以后者的同步时间更短更适合处理突发信号,因此在存在突发情况的全数字接收机中得到了广泛应用。数字滤波平方法适用于正在研究项目中,要求可以处理突发情况下MPSK与MQAM调制信号的定时同步,并且在高速通信情况下,通过对算法的定时误差估计模块进行并行结构实现,可以大幅降低对于时钟的要求,所以对数字滤波平方法的研究是必要和有意义的。
1 定时同步原理

其中,cn为发送的符号数据;g(t)=gT(t)×gR(t)为系统脉冲响应;gT(t)为发送端成型滤波器的脉冲响应;gR(t)为接收端匹配滤波器的脉冲响应;T为符号周期;ε(t)为慢变的采样时间误差;B(t)为载波相差,这里不考虑载波相差,即B(t)=0,n(t)为高斯噪声,n(t)~N(0,2δ2),其同相分量和正交分量的方差均为 δ2。
对接收信号r(t)以采样率N/T采样可得

然后对采样后的信号取模并平方,得xk样本信号,该样本信号中包含有一个频率为1/T的频谱分量,该频谱分量中就包含有定时误差信息。通过计算每一段长为LN(即LN个采样数据;L代表一次运算的符号数;N表示每个符号的采样点数;一般取N=4)的数据序列的傅里叶系数提取出来,该系数为
对于一般的线性调制信号,有

最后,对提取的系数求弧度角,并乘以一个常数-1/2π,得到定时误差的估计值为

式中求出的定时误差ε^为ε的无偏估计。
2 定时误差估计
2.1 实现框图
根据式(3),当N=4时通过公式变换可得定时误差估计实现框图如图1所示。
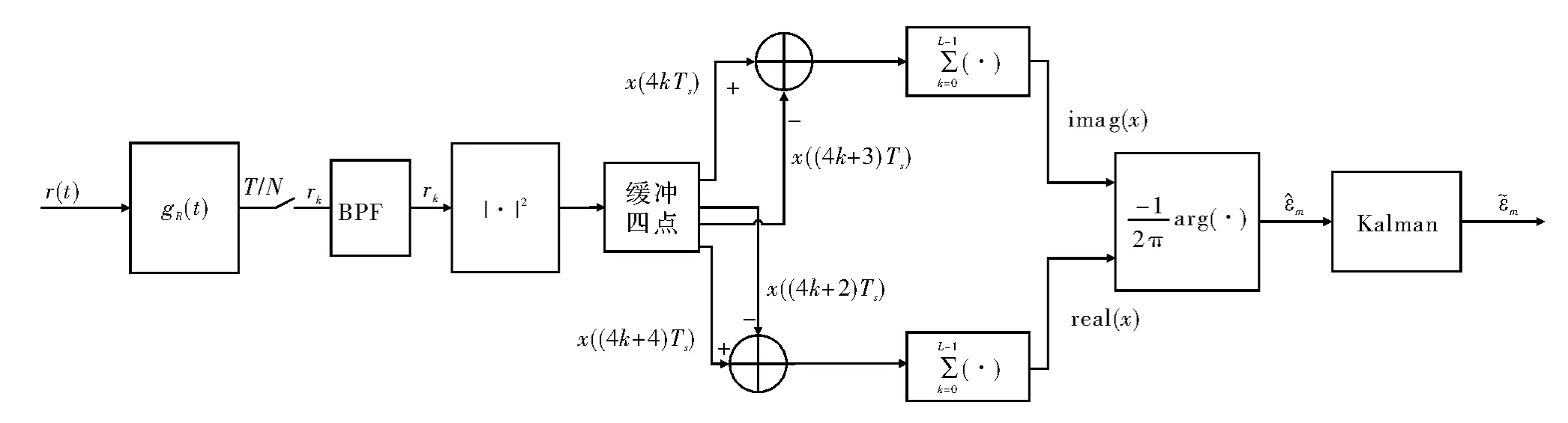
图1 定时误差估计
其中,匹配滤波之后,加入一个中心频率为1/2T,带宽为α/T的带通滤波器,用来滤除带外噪声,并在误差求出之后加入一个卡尔曼滤波器[2],用以对结果进行平滑。
2.2 误差估计的并行结构
针对高速数据传输时的通信,在定时同步的前端,ADC采样采取并行结构,也即ADC通过并行时间交织的采样方式进行4倍采样。然后匹配滤波器设计为并行转置型FIR,进行并行输出,输出的结果再次使用并行结构,分别求出式(5)中image(x)和real(x),并行结构如图2所示。

图2 定时误差估计并行算法结构
预设定时误差为1/4,在不同输入信噪比情况下验证定时误差估计的准确性,如图3所示。定时误差并行算法结构能够正确地估计定时误差。
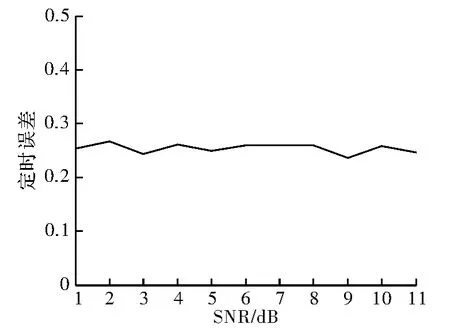
图3 不同信噪比下的定时估计误差
3 定时控制
定时控制部分,文献[3~4]提到用与Gardner算法中相同的控制方法,即环路滤波和NCO控制。在此,文中使用另外一种定时控制方法[6],获得了更好的效果。定时控制部分,文中采用定时估计算法,估计出的误差值去控制产生内插所要用到的整数间隔mk和分数间隔μk。
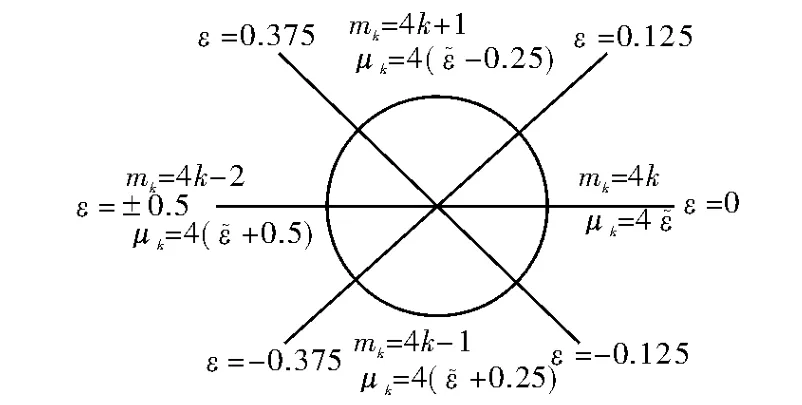
图4 定时控制
Gardner定时控制方法和新控制方法分别为两种定时控制方法在码速率为300 MHz,采样率为1.2 GHz,时偏为0.25T,SNR为15 dB时的星座图。从星座图可明显看出,新控制方法效果更好,星座图更加收敛。
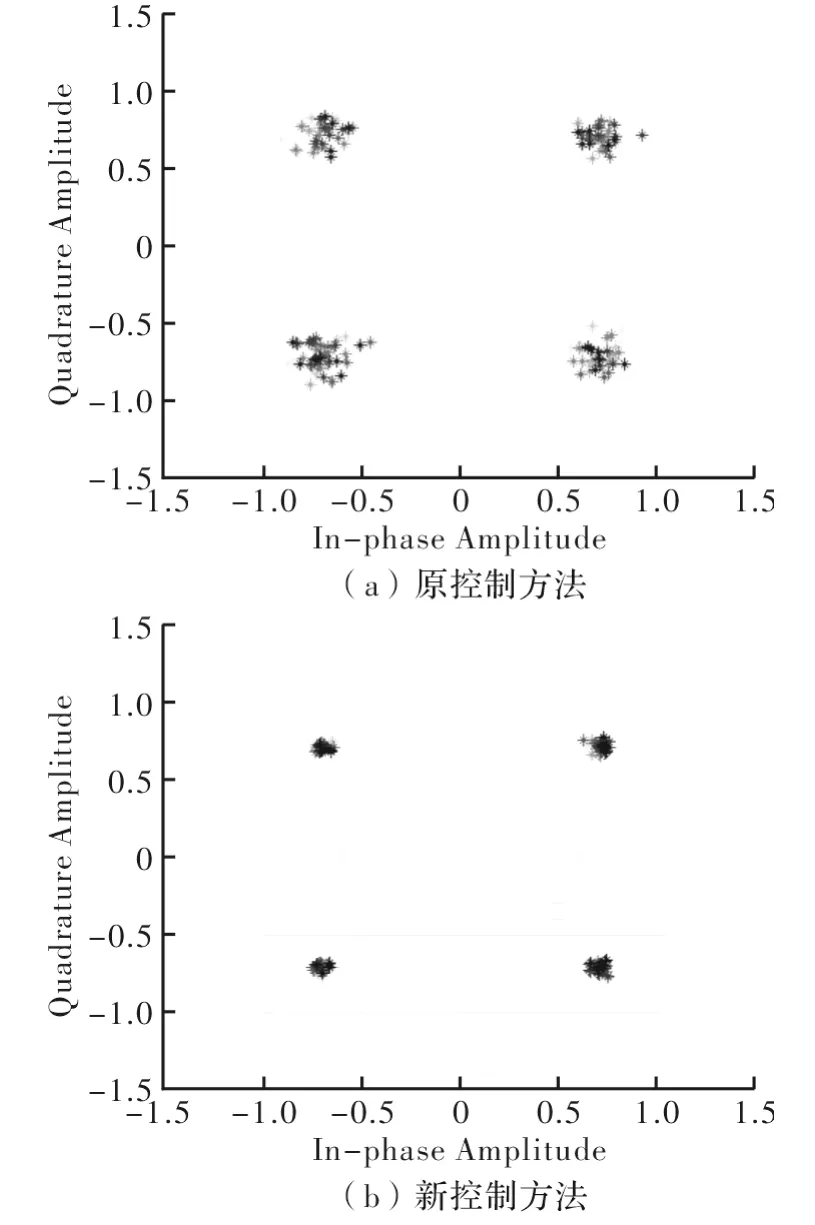
图5 定时控制
4 Matlab仿真
仿真中,采用QPSK调制,匹配滤波器滚降系数设为0.35,符号率为300 MHz,采样率 1.2 GHz,每个码元采4个点,信噪比设为15 dB,信道为高斯白噪声信道。
当时偏设为0.25T和-0.25T时,环路定时误差检测结果分别如图6(a)和图6(b)所示。通过图8可以看出误差检测结果是可信的。
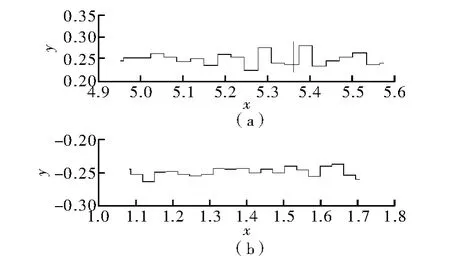
图6 时偏0.25T和-0.25T时定时误差检测结果
5 算法实现
在Matlab仿真性能得到保证的前提下,文中对该算法进行了硬件实现,并取得了良好的效果。算法硬件实现流程,如图7所示。
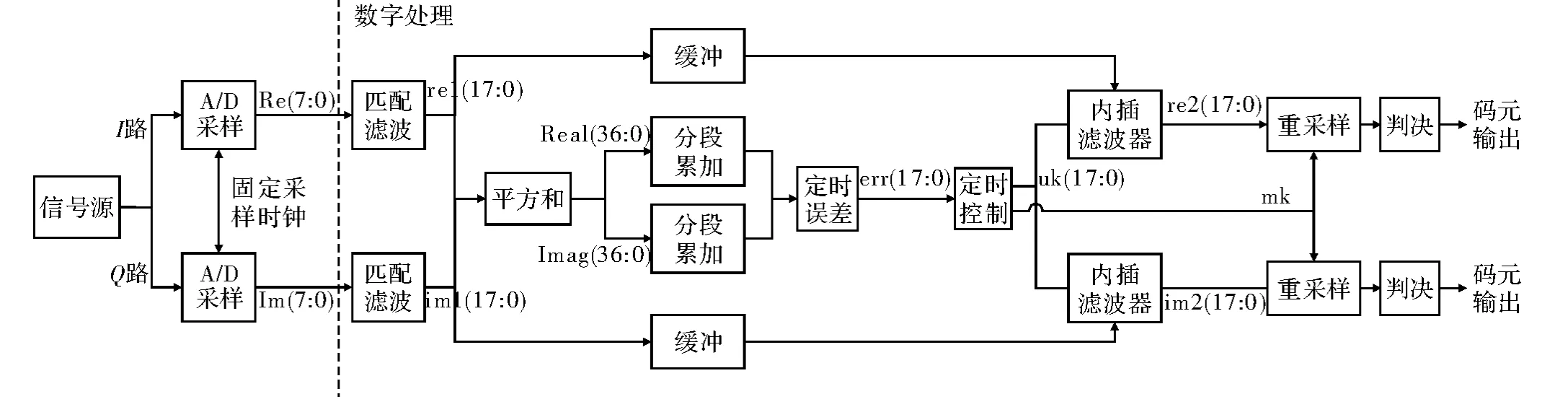
图7 硬件实现流程图
信号源部分使用信号发生器产生300 MHz的BPSK信号,A/D采样率为1.2 GHz,A/D直接对基带信号以4倍的符号率采样,匹配滤波的滚降系数为0.5,数字处理部分采用Xilinx公司的Virtex-4系列FPGA芯片。算法实现消耗8%的Slices以及14%的DSP48s。
使用Chipscope观察,当信噪比为15 dB时,定时同步前后的星座图对比如图8所示。
6 结束语
设计了基于数字滤波平方的全数字接收机定时同步方法,定时同步环路主要由定时误差提取、定时控制与内插滤波器3部分组成。其中,定时误差是由基带采样信号进行离散傅里叶变换提取得到,并且文中设计了一种适用于高速通信下的并行实现结构,内插系数由定时控制模块计算的小数间隔确定,从定时控制模块计算出的整数间隔相当于重采样时钟,对内插后的信号进行采样,即可得到同步数据。数字滤波平方法属于非数据辅助型,对载波不敏感,可以先于载波同步进行,算法实现结构属于前馈式,适合于突发通信、运算简单、系统实现方便,Matlab仿真与硬件实现结果表明,该设计方案可以较好地解决定时问题。
图8 不加噪声定时同步前星座图和后星座图
[1]OERDER M,MYER H.Digital filter and square timing pecovery[J].IEEE Transactions on Communications,1988,36(5):605-612.
[2]GOULVEN E,CHRISTOPHE L.Non data aided timing recovery algorithm for digital underwater communications[EB/OL].(2007-09-20)[2013-02-14]www.ieee xplore.com.
[3]胡晓娇,杨志专,胡修林.全数字接收机平方定时恢复环路[J].现代有线传输,2005(6):84-87.
[4]蒋科,胡爱群,姚冰心,等.一种符号定时算法的研究与仿真[J].电子工程师,2006(3):43-46.
[5]田耘,徐文波,张延伟,等.无线通信FPGA设计[M].北京:电子工业出版社,2008.
[6]WU Yikchung.Demodulation and symbol timing recovery in software radio[D].Hongkong:The HKUScholars Hub,2000.
[7]郝建华,许斌,卿超.接收机位定时恢复设计[J].国外电子测量技术,2007,6(12):16 -18,54.
[8]顾奕.平方律定时恢复接收机设计[J].北京信息科技大学学报,2012,27(3):6 -9.
[9]MUELLER K,BELL LAB,HOLMDEL N J,et al.Timing recovery in digital synchronous data receivers [J].IEEE Transactions on Communication,1976,24(5):516 -530.
[10]FLOYD M G.Interpolation in digital modems partⅠ:fundamentals[J].IEEE Transactions on Communication,1993,41(6):501-507.
