一种搜索雷达视频数据的实时处理与实现
2014-12-18李龙
李 龙
(中国电子科技集团公司第20研究所雷达部,陕西西安 710068)
在搜索雷达系统中,由于雷达的威力大、搜索范围广,雷达的回波数据即使经过信号处理系统处理后,还会有大量的杂波存在[1]。在众多的杂波中找到有效的目标信号,并获得其运动状态等信息就显得非常重要。雷达视频数据处理技术在此要求下应运而生,其在整个雷达系统中起着关键的作用。雷达视频数据处理主要是将通过信号处理系统处理后的雷达回波视频数据,在中心机等系统中对其进行更高层次的处理,即对雷达回波视频数据进行点迹凝聚、航迹建立及管理等处理。通过处理,不仅可以得到所需目标的准确位置信息,还能得到其运动轨迹、速度等运动状态信息[2]。由于现代雷达回波视频数据量大而且雷达系统对软件算法的实时性要求较高,因此在文中将偏重于算法的实时性和软件可实现性,结合某型搜索雷达系统,对雷达视频数据的实时处理即点迹凝聚和航迹建立及管理等相关算法进行讨论。
1 点迹凝聚
点迹凝聚的实质是为了在复杂的雷达回波视频中,排除各种杂波的干扰以及目标可能出现分裂等影响,按照一定的算法,对信号处理系统送来的回波视频进行点迹合并和剔除的过程,以此来提高对目标的检测精度。点迹凝聚性能的好坏不仅直接关系到自身对目标检测的效果,还对后续的航迹建立和管理的精度和稳定度产生重要影响。二维点迹凝聚算法一般分为两部分:一个是方位上的凝聚;另一个是距离上的凝聚。大多数文献都是采用先对原始雷达回波视频进行距离上的凝聚,然后进行方位上的凝聚的办法[3]。由于考虑到雷达波束在对实际目标进行扫描时,波束的波瓣会有一定的宽度,导致同一个目标被多个波束扫描到,体现在数据中就是一个目标会有很多个方位值,因此在本雷达视频数据处理中将采取先方位上凝聚,后距离上凝聚的处理。这样处理的优点在于,一般而言,在雷达系统中,大多数目标在方位上的分布要比距离上的分布宽,因此若采用先方位上凝聚,可以一次性将目标的数据量进行压缩,而且还可以将非相参积累应用于方位上的凝聚,有利于整体算法复杂度的降低。
点迹凝聚算法的过程大致如下:首先对当前距离的方位数据进行方位上的检测,录取目标的方位信息,然后再对前一距离或后一距离的数据进行合并,并对合并后的目标距离数据进行距离上的检测,距离方向检测后输出符合要求的有效目标点迹,并录取其位置参数信息。整个点迹凝聚处理的算法流程如图1所示。
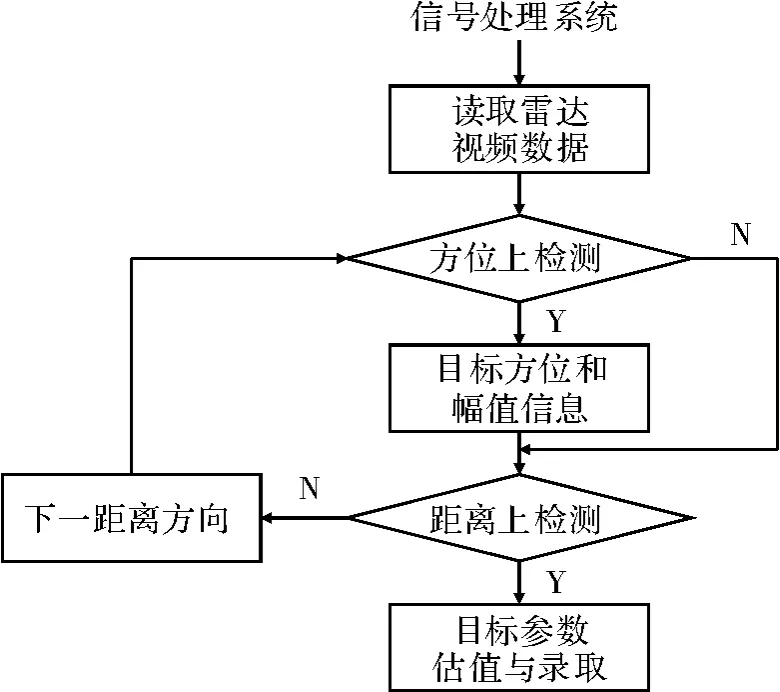
图1 点迹凝聚处理的算法流程图
1.1 方位上的点迹凝聚
对于方位上的点迹凝聚而言,其主要任务是对回波视频采用过门限检测,并在方位单元上进行有选择地合并,且对方位信息进行记录。主要是确定目标起始方位、目标终止方位。通过逻辑滑窗检测法以非相参积累准则如4/7准则等对目标进行判断,如果满足准则,则判断其为目标,并对其进行相应的计算。
1.2 距离上的点迹凝聚
距离上的点迹凝聚过程是在方位上的合并检测与凝聚的基础上进行,主要采用以下两方面的处理:一是如果当前距离上已经有目标,需要判断此目标是一个新目标的起始,还是旧目标在当前距离上的延续。二是前一个或后一个距离单元上如果有目标且当前距离上没有此目标的延续,就判断此目标终止。最后,还需要根据目标的最小和最大宽度限制,对待选目标进行判断,如果满足条件则计算目标的方位和距离估值并输出目标参数信息,否则删除此目标信息。
1.3 目标参数估值与录取
目标参数估值与录取是点迹凝聚进行目标检测与合并之后的处理环节,其主要任务是对点迹的距离和方位信息进行估值与录取,即计算点迹的距离和方位估值。本文采用质心算法求取点迹的质心以表示点迹的位置信息,即在方位和距离上的计算中都通过幅度加权来求取目标信息。
2 航迹建立和管理
对于搜索雷达系统而言,仅建立起雷达目标的点迹信息是远远不够的,其不利于观察目标的运动轨迹、运动速度等相关信息。由于航迹信息包含了目标运动的距离、方位、运动趋势、速度等信息,有助于决策者更好地掌控雷达作用范围内各类目标的运动状态,能够为雷达系统提供实时的决策信息。同时,航迹管理还能将人为感兴趣区域内的目标航迹从众多雷达点迹中单独提取出来,找出不同目标的运动轨迹并对其进行分析和处理,这都是航迹建立和管理的作用[4-7]。
本文将航迹按照其可靠性高低依次分为可靠航迹、分支航迹和暂时航迹。其中,可靠航迹指的是经过雷达多个周期的录取,能够有稳定输出的航迹。分支航迹和可靠航迹是一一对应的关系,当可靠航迹某一周期未录取上点迹时,将通过扩大跟踪波门录取到的点作为新建分支航迹的录取点。暂时航迹是指可靠度不够高,还需要继续录取点迹的非确认航迹。已录取的自由点迹,若初始波门与新的点迹相关上,则转化为暂时航迹。
航迹建立和管理从处理流程上来说,依次包含了航迹的起始、目标航迹和待选点迹的相关、航迹的形成、航迹的预测、航迹的终止等过程。同时,通过对建立起的航迹使用计分法进行航迹质量的管理,实现航迹由自由点向暂时航迹再到可靠航迹的转换。实际的软件实现中,由于可靠航迹与暂时航迹的优先级高,因此,在软件的设计过程中首先进行航迹的相关录取工作,即通过航迹与点迹之间的“粗相关”和“精相关”来录取相关点迹;然后是航迹质量管理,其中包括了航迹质量的更新、确认和删除;随后是航迹滤波外推,对目标航迹信息进行平滑并预测下一时刻的状态信息;最后是自由点相关,包括了新航迹的建立和自由点的录取。整个航迹处理软件流程如图2所示。
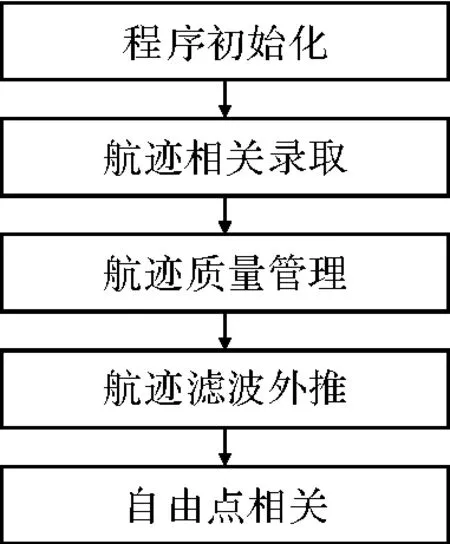
图2 航迹处理软件流程示意图
2.1 航迹相关录取
航迹相关录取指的是对可靠航迹、暂时航迹以及分支航迹与待选点迹进行相关录取,其主要通过跟踪波门来判断待选点迹和航迹之间的关系。整个过程可以分为“粗相关”和“精相关”两个步骤[4]。“粗相关”指的是根据航迹上一周期的预测值为中心建立扇形相关波门,波门的大小主要根据目标的距离、速度、方位等信息而定,如果本周期点迹的观测值落入波门内,则说明点迹与航迹相关上;“精相关”指由于在“粗相关”的处理过程中,有可能存在多个点迹与一个航迹相关,因此,需要确定唯一的点迹作为该航迹的相关点。本文选取待选点迹到航迹直线距离最小的点作为该航迹的录取点。整个算法的流程如图3所示。
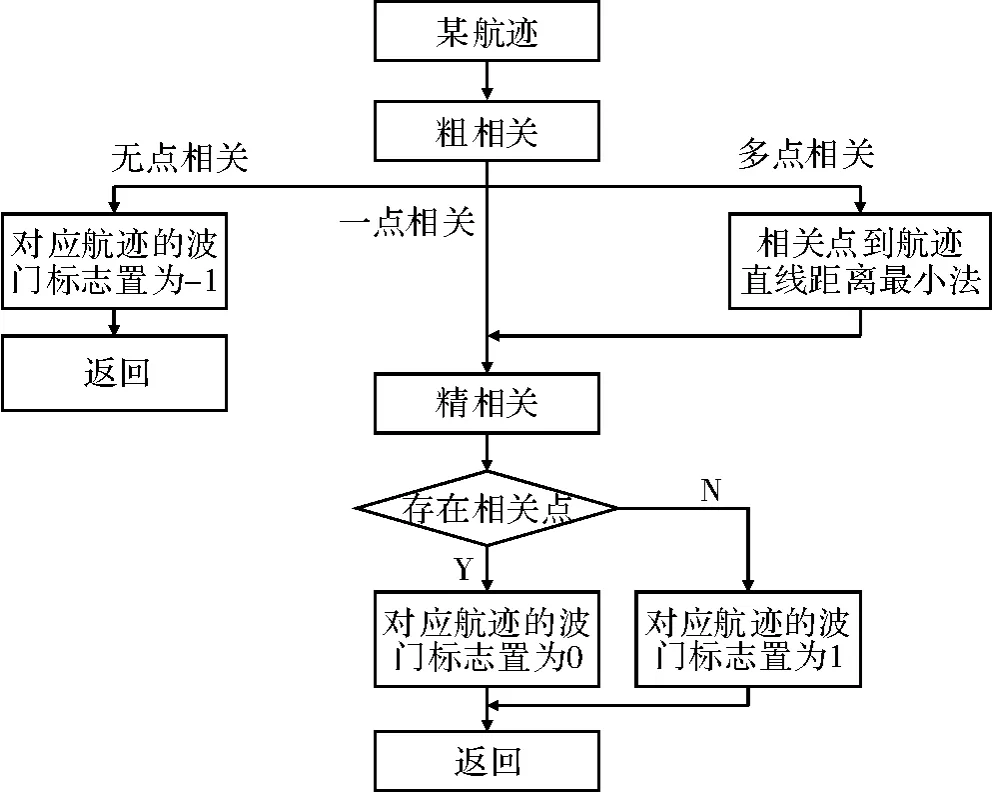
图3 航迹相关录取流程示意图
2.2 航迹质量管理
航迹质量管理主要以计分法对航迹质量进行打分,并在整个过程中对航迹质量分数进行更新。同时,由于存在航迹之间的转换以及航迹的建立与删除,因此,需要实时对航迹质量进行管理。
2.3 航迹滤波外推
航迹滤波外推主要实现两个功能:一是对当前测量值进行平滑;二是对下一周期的状态进行预测。考虑到算法实施的实时性,本系统采用最小二乘法,首先对所有航迹的测量值进行更新,然后根据航迹的类型,选取不同的滤波点数计算航迹的滤波值和外推值。
2.4 自由点相关
自由点相关完成两项工作:一项是对上一周期的自由点迹的初始波门录取,建立起分支航迹;另一项是在航迹起始区域范围的限制下,对本周期的自由点进行存储,实现区域建航的目的。
3 关键技术
3.1 优先录取的实现
由于该搜索雷达系统数据量大,因此在实际的数据传输和处理过程中,将整屏的数据依据角度值平均划分为32个卦限处理。天线每转过一个卦限,就将当前卦限数据放入缓冲区内。考虑到航迹种类的优先级,设立了5个卦限的缓冲区,分别对各类航迹及自由点进行处理,确保每卦限的点迹优先被航迹录取,然后剩余的自由点才可能录取为新建航迹的首点。
3.2 非相参积累
在方位上的点迹凝聚过程中,由于雷达重频和天线转速的不同,导致即便是同一目标,其在不同的雷达重频和天线转速下,在雷达回波视频中所占据的方位宽度也不同。因此,在进行非相参积累时,需要根据不同雷达重频和天线转速,对符合目标特征的参数进行估算,从而采用不同的m/n准则,如4/7准则、3/5准则等。
3.3 固定目标问题
对于固定目标,由于雷达系统存在测量误差,因此固定目标的测量值存在不定方向的摇摆情况。同时,由于跟踪波门进行相关录取时,引入了航向偏差角的概念,即以雷达上一周期的滤波值为顶点,其与本周期的测量值和上一周期的外推值形成的射线为边所成的夹角。航向偏差角的限制,给固定点的录取带来了困难。考虑到一般运动目标录取的航向偏差角不会太大,因此本文采用一种动态航向偏差角对波门进行限制,即如果小的航向偏差角未能录取到点,则将航向偏差角成倍数放大,直到录取到点或者达到有效角度的最大值,实际测试证明了这种方法的实用性。
3.4 滤波算法
根据航迹的不同类型以及目标机动性的不同,滤波算法也需要做出针对性的改变。对于暂时航迹而言,由于其参与滤波的点数有限,因此采用较少点数的滤波算法,而对于可靠航迹,由于其能够参与滤波的点数相对较多,因此采用较多点数的滤波算法。同时,综合考虑到可靠航迹的机动性,在机动性判定之后,对机动性强的目标采用较少点数的滤波算法,对机动性弱的目标采用较多点数的滤波算法。对于可靠航迹对应的分支航迹,由于其是在可靠航迹丢点的情况下建立,这种情况有可能是由于目标机动引起的,所以对分支航迹也采用较少点数的滤波算法。
4 软件实现和测试
雷达视频数据处理算法在VxWorks操作系统下通过C++实现。软件设计流程如下:定时板定时产生卦限中断,发起主动DMA传送,信号处理系统向数据处理软件指定内存区域传送上一卦限的雷达视频数据。数据处理软件响应该中断,启动点迹凝聚算法,对雷达搜索区域内的回波视频数据进行凝聚,得到凝聚后的点迹,然后对凝聚后的点迹进行航迹建立和管理,由此实现雷达视频数据的处理。软件流程如图4所示。
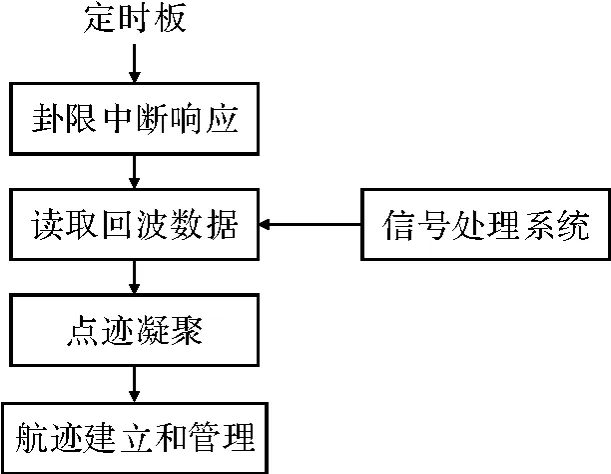
图4 数据处理软件流程示意图
通过软件的实现,并在实际环境下对软件性能进行测试,得到每一卦限数据处理软件实现点迹凝聚功能的时间在30 ms以内,实现航迹建立和管理功能的时间在20 ms以内,能够满足雷达系统对视频数据处理算法的要求。
5 结束语
本文给出了一种实时的点迹凝聚、航迹建立和管理的算法,通过软件实现以及经过外场试验验证,该算法凝聚成的点迹与原始回波视频数据的吻合度高,航迹能够快速起批,也能对雷达显控台发出的其它有关点迹和航迹的指令做出及时和正确的响应,其各项指标能够满足雷达系统的要求。
[1]丁鹭飞,耿富录.雷达原理[M].北京:电子工业出版社,2009.
[2]何友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2009.
[3]宇忠源.船舶导航雷达目标检测算法研究及程序开发[D].大连:大连海事大学,2010.
[4]管桦.边扫边跟踪(TWS)雷达航迹跟踪算法的研究[D].西安:西北工业大学,2003.
[5]郑光海.基于机载雷达的数据处理算法仿真研究[D].成都:电子科技大学,2010.
[6]马玲.边扫描边跟踪雷达航迹跟踪算法的研究[D].西安:西北工业大学,2004.
[7]刘宇.雷达数据处理中的航迹相关[D].成都:四川大学,2003.
