车牌倾斜校正算法研究
2014-12-18刘威
刘 威
(廊坊市广播电视大学,廊坊 065000)
0 引言
车牌识别作为智能交通系统关键组成部分,占有重要的作用。通过车牌识别技术,可以准确获得路面上车辆的车牌信息,为实时交通监控、安全防盗等提供重要依据。车牌识别[1]是利用计算机视觉、图像处理和模式识别等技术,对摄像机拍摄的车辆图经由计算机的识别软件进行分析处理识别车牌上字符的一种技术。通常,由于拍摄角度与位置关系,会出现摄像机拍摄的车辆图片倾斜的现象,导致车牌分割错误,进而降低字符识别率。因此,倾斜车牌的校正就成为车牌识别过程中重要环节,通过对倾斜车牌校正,进一步正确分割车牌。
车牌倾斜主要有三种模式[2],即水平方向、垂直方向和混合方向上(水平和垂直方向上的综合)的车牌倾斜。水平倾斜指车牌在垂直方向上的扭曲造成的,边框为一个平行四边形;垂直倾斜是由于车牌旋转一定的角度造成的,边框仍为矩形。现在采集的图像大多是混合倾斜的车牌图像,因此在校正过程中,需对两个方向上的倾斜同时进行校正。
现有的车牌倾斜校正算法主要有以下三种:1)Hough变换法;2)旋转投影变换法;3)基于主元分析的车牌倾斜校正方法[3~7]。以上方法尽管在实际应用中都取得一定效果,但还存在一些不足。例如,Hough变换通过求取车牌边框来确定倾斜角,当车牌边框存在一些边框不明显、噪声等干扰因素影响时,该方法效果不理想;旋转投影变换法,需要在各个方向上进行投影计算,因而计算量大。基于此,本文提出一种新的车牌倾斜校正方法,即利用Sobel算子对车牌图像进行边缘检测,接着对其进行Radon变换,确定出车牌在水平和垂直方向上的倾斜角度,结合不同方向上倾斜角度分别对水平倾斜、垂直倾斜的车牌进行双线性插值旋转校正和错位偏移校正,使得车牌正确分割。
1 边缘检测与Radon变换
1.1 边缘检测
为了标识图像中亮度变化明显的点需要对其进行边缘检测,还大大减少了数据量,检测出边缘图像就可以进一步分析和提取特征。现在已有很多算法和算子的改进用于边缘检测,但各有优缺点,应用领域不同。本文采用Sobel边缘检测算子[8~10],它是离散性差分算子,由两个卷积核对原图像进行卷积,可得到横向与纵向亮度差分近似值。先对某一像素点(x ,y) 周围像素值进行加权平均,判断该像素点是否处于极值,若是,则认为是边缘点。该算法具有计算简单有效,速度快对噪声具有平滑作用等优点。
对于一个连续图像函数 f (x, y),在水平和垂直方向上的梯度分别用GX,GY表示,GX则用来检测垂直边缘,GY用来检测水平边缘。GX,GY可通过如下式来计算。
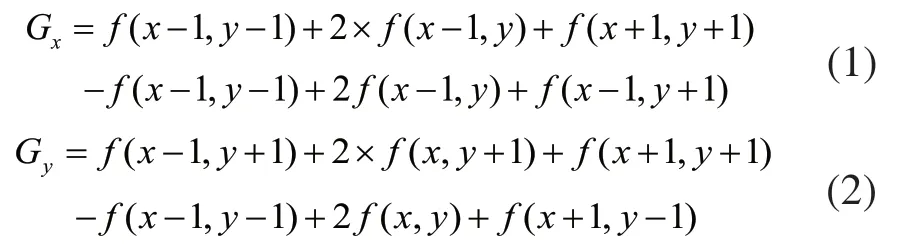
设定一阈值TH对图像进行二值化处理,通过与图像像素点的梯度值进行比较大小确定是否为边缘点。边缘点即为梯度值等于或大于TH的点,小于TH的点则不是边缘点,以此实现边缘检测。具体算法步骤如下所示[11]:
Step1:分别按水平和垂直方向从左到右,从下到上遍历图像的每个像素点;
Step2:对图像中的像素值与水平、垂直梯度系数的乘积作累加和;
Step4:比较新像素值与TH大小,判断出图像的边缘点。
1.2 Radon变换
Radon变换是指图像矩阵沿着某一角度进行投影,投影后对数据进行一阶导数绝对值相加,得到一极值时的角度即为倾斜角。二维图像f(x,y)的投影即某一方向上的线积分,如f(x,y)在x轴、y轴上的投影分别表示在垂直和水平方向上的线积分。f(x,y)在任意角度θ计算投影亦即图像的Radon变换。Radon变换的定义如下:

其中:

其几何关系如图1所示。
2 车牌倾斜校正算法
车牌倾斜校正算法如下:首先对车牌图像转化为灰度图像,接着进行水平和垂直方向上边缘检测,然后利用Radon变换计算出车牌在水平和垂直方向上的倾斜角度,根据倾斜角度进行双线性插值旋转校正和错位偏移校正。其流程如图2所示。
2.1 车牌边框、铆钉等去除

图1 Radon变换的几何对应关系
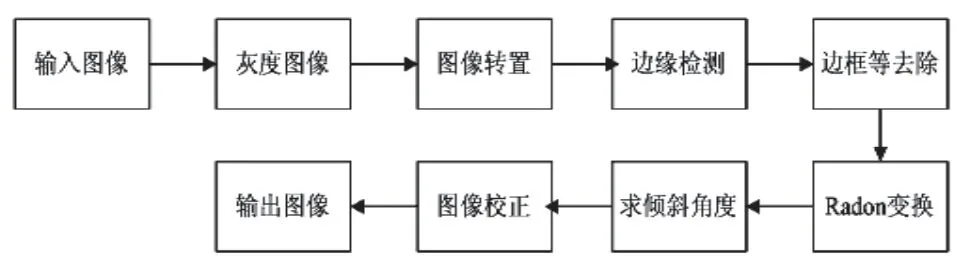
图2 倾斜车牌校正的流程序
车牌边框以及钉在车牌上的铆钉会对字符切割产生一定影响,因此,在进行车牌倾斜校正前需对其去除。对二值化图像进行水平和垂直方向上边缘检测,就可去掉车牌边框;车牌字符区域投影值较大,且纵向扫描车牌时铆钉等黑白跳变次数不频繁,根据黑白跳变次数来判断是否为字符,设定一阈值,若黑白跳变次数大于T,则投影区域为字符。
2.2 车牌倾斜角获取
车牌倾斜角求取分为水平倾斜角和垂直倾斜角,原始车牌图像进行转换后,对其进行Radon变换分别获取车辆倾斜角。利用Radon变换计算车牌倾斜角原理如下:
Step1:通常车牌倾斜角度范围[-45°,+45°],对车牌进行-45°,+45°的Radon变换;
Step2:针对Step1中结果进行一阶导数绝对值求和;
Step3:当计算到最大累加和时对应的角度,即为倾斜角度。
2.3 车牌校正
倾斜车牌校正同样分为水平方向校正和垂直方向校正。利用上节提到的车牌倾斜角度获取方法,计算得到车牌在水平方向的倾斜角度α 和垂直方向上的倾斜角度β。对于水平倾斜校正来说,根据α 大小进行双线性插值旋转,若α >0,则进行顺时针旋转,否则反之,然后进行转置,就可以校正水平倾斜的车牌图像;对于垂直倾斜校正,即位于同一行间像素错位偏移,需要对其进行移位来确定校正后像素坐标点。具体过程如下:

计算得到校正后像素点坐标后,接着利用双线性插值运算其灰度值。
3 实验结果
为了验证本文校正算法性能,利用本文提出的算法对拍摄图像进行测试,其中倾斜角度获取有两种方式,主要包括利用本文算法求得倾斜车牌的倾斜角度以及人工方式测得其倾斜角度。倾斜车牌校正过程如图3所示。

图3 倾斜车牌校正过程
本文算法对图3中的倾斜车牌进行Radon变换,然后对其结果进行求一阶导数绝对值累加和,计算得到一极值,所对应角度即为倾斜角度,计算倾斜车牌的水平角度为25°,垂直角度为40°。为了和本文车牌倾斜校正算法得到的校正后的图片进行对照,进行人工测量倾斜车牌的倾斜角度,人工测得图3中倾斜车牌的水平倾斜和垂直倾斜角度分别为:23°和41°。将人工测得车牌倾斜角度代入到算法中进行车牌校正,得到校正结果如图4所示。

图4 车牌校正结果
对于有污迹的车牌,采用本文算法进行倾斜校正后结果如图5所示。

图5 污迹倾斜车牌的校正过程

图6 本文算法和文献算法校正结果比较
将本文算法分别与采用文献[12]中基于子区域投影分析的车牌倾斜校正算法和文献[13]中基于Radon变换的车牌倾斜校正算法进行比较,比较结果如图6所示。
由图3、图4和图5可以看出,本文算法进行车牌倾斜校正取得了较好的效果。校正后图片清晰,表明采用该算法进行车牌倾斜校正的可行性,且操作简单,对有污点、光照等影响不敏感。通过本文算法和文献提出的算法进行车牌倾斜校正实验,进一步分析得出,本文算法比文献中提出的两种算法校正效果更明显,并能有效去除铆钉等,运算效率高。
4 结束语
本文在分析Sobel算子和Radon变换的基础上,提出一种新的倾斜车牌校正方法。该方法采用Sobel算子进行图像边缘检测,利用倾斜车牌的Radon变换,对变换结果求取一阶导数绝对值累加和,得到极值所对应的角度来确定倾斜车牌的水平和垂直倾斜角度。然后对车牌进行旋转校正。通过与文献算法比较实验结果表明,该方法进行车牌倾斜校正的可行性,操作简便,运行速度快,并对污迹、光照等影响时的倾斜车牌校正仍然可以取得令人满意的结果。因此,具有一定的应用前景。
[1]王晓雪,苏杏丽.数字图像处理在车牌识别中的应用[J].自动化仪表,2010,31(7):22-25,28.
[2]薛迎卫.基于小波变换与支持向量机的车牌识别[D].北京化工大学,2009.
[3]许智榜,石晓瑛.基于RBF神经网络的车牌自动识别系统设计与实现[J].南昌大学学报(工科版),2009,31(2):147-150.
[4]朱梦哲,陈志华,赵钟,尤越.基于OpenCV的车牌定位和校正方法[J].计算机应用.2013,33(S1):223-226,225。
[5]马腾飞,郑永果,赵卫东.基于边缘检测与Hough变换的车牌字符分割算法[J].系统仿真学报,2006,18(Z1)391-392
[6]申继龙,车牌定位和倾斜校正的关键技术研究[D].南京邮电大学,2013.
[7]朱程辉,吴德会.基于主元分析的倾斜车牌图像校正方法研究[J].微电子学与计算机,2006,23(1):177-180.
[8]袁春兰,熊宗龙,周雪花,等.基于Sobel算子的图像边缘检测研究[J].激光与红外,2009,39(1):85-87.
[9]Health A,Sarkar S,Sanocki T,et al.Comparision of edge detections.A methodology and initial study[J].Computer Vision and Image Undersstanding.1998,69(1):38-54.
[10]沈峰亭,魏红.基于改进Sobel算子的螺纹边缘检测[J].微计算机信息,2008,24(1-1):261-262.
[11]陈含,吕行军,田凤珍,等.基于Sobel算子边缘检测的麦穗图像分割[J].农机化研究,2013,35(3):33-36.
[12]马洪霞.基于子区域投影分析的车牌倾斜校正[J].计算机应用与软件,2012,29(6):253-255,293.
[13]贾晓丹,李文举,王海姣.一种新的基于Radon变换的车牌倾斜校正方法[J].计算机工程与应用,2008,44(3):245-248.
