基于VersaMotion的单轴位置控制装置设计与调试
2014-12-18刘艺柱
刘艺柱
(天津中德职业技术学院,天津 300350)
0 引言
随着自动化水平的不断提高,越来越多的工业控制场合需要精确的位置控制。因此,如何更方便、更准确地实现位置控制是工业控制领域内的一个重要问题。位置控制的精确性主要取决于伺服驱动器和运动控制器的精度。高端的运动控制模块可以对伺服系统进行非常复杂的运动控制。但在有些位置控制的场合,其对位置精度要求比较高,但运动轨迹简单,这就没有必要选择昂贵的高端运动控制系统[1]。GE智能平台VersaMotion作为一款独立型单轴控制器,常用于低端位置控制应用。因此,如何利用VersaMotion实现对伺服电机运动位置精准控制是本文的研究重点。
1 控制系统描述
1.1 控制对象
单轴位置控制对象原理如图1所示。
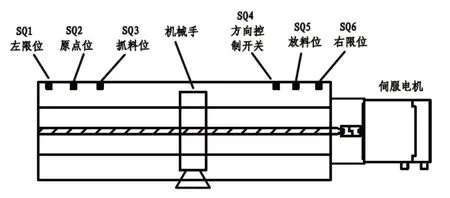
图1 单轴位置控制对象原理图
1.2 控制流程
单轴位置控制工作流程图如图2所示。

图2 单轴位置控制流程图
1.3 结构设计
结构设计如图3所示。伺服电机、THK1605型精密滚珠丝杠(含滑台)、THK90精密数控直线导轨和支架等组成传动装置。组合气动机械手安装在滑台上,滑台由导轨支撑、滚珠丝杠驱动;丝杠经联轴器与伺服电机连接。操控指示台与传动装置分离,便于远距离监控。
THK1605型精密滚珠丝杠具有摩擦小、精度高、满足于高低速场合应用等特性。全长600mm,丝杠导程5mm,滚珠圈数4圈,重复定位精度误差为±0.02mm。THK90型精密数控直线导轨具有摩擦小、机械强度高等特性。导轨直径16mm,导轨全长600mm。铝制型材工作台由4080型和4040型铝合金型材通过专用直角连接件拼接而成。
安装时SQ2距SQ326mm,SQ3距SQ5387mm;SQ4在SQ5的左侧,两者距离L1=28mm;滑台宽度W=60mm。L1<W是指机械手到达放料位SQ5时,能够同时触碰到SQ4和SQ5,目的是为电机反转发出控制信号。
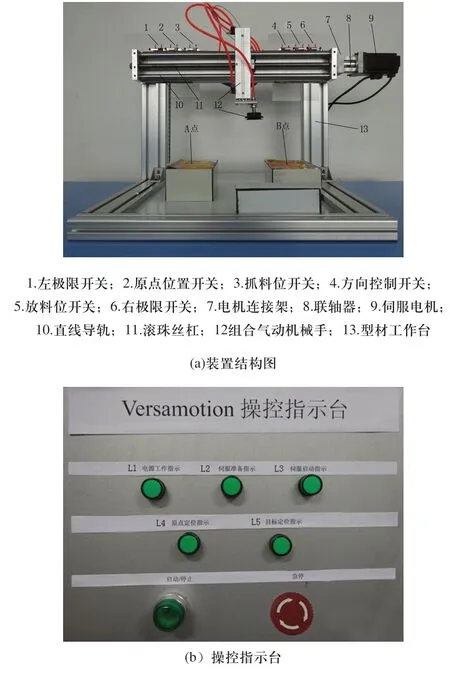
图3 单轴位置控制对象实物图
2 系统硬件设计
控制系统包括电气控制回路和气动控制回路两部分。电气控制回路主要是由IC800VMA022-BB进阶泛用型伺服驱动器、IC800VMM02LNKSE25A伺服电机、时间继电器、开关和指示灯等组成;而气动回路则是由多组电磁阀气缸与若干气路组成[2]。
2.1 硬件选型
2.1.1 伺服驱动器
图4所示为IC800VMA022-BB进阶泛用型区数字伺服驱动器及接口接线图。伺服驱动器的铭牌参数如表1所示。

表1 伺服驱动器铭牌参数表
伺服驱动器使用方便、操作维护简单,可以处于长时间连续运行状态,具备位置、速度、扭矩三种标准控制模式,可实现原点归位、分度、自动循环定位、瞬时停电再启动、参数跳变、模式切换等功能,及过电流、过电压、欠电压、过负载、编码器故障等自我保护功能,具有较高的环境适应和抗干扰能力。
2.1.2 伺服电机
IC800VMM02LNKSE25A型伺服电机的铭牌参数如表2所示。

表2 伺服驱动器铭牌参数表
伺服电机可实现位置、速度和力矩的闭环控制;克服了步进电机失步的问题;低速运行平稳、高速性能好、加减速的动态相应时间;发热慢、噪音低、抗过载能力强;特别适用于有瞬间负载波动和要求快速起动响应的场合。
2.1.3 时间继电器
欧姆龙H3Y-2S通电延时型继电器的名牌参数如表3所示。

表3 时间继电器铭牌参数表
欧姆龙H3Y-2S通电延时采用集成电路作主要元件,具有延时范围广,延时精度高,可靠性好,寿命长以及体积小,重量轻等优点,广泛应用于各种要求高精度、高可靠性的自动控制系统。
2.2 电气控制回路设计
电气控制回路主要由主电路和控制电路两部分组成,主电路主要是指伺服电机的驱动电路,控制电路主要是指伺服驱动器的控制接口电路。伺服驱动器的接线图如图4所示。
伺服驱动器的CN1接口通过专用线缆扩展为CN1端子接线排,端子接线排上有50个端子接口,分为上下两排,每排25个端子;每个端子接口标有接口序号和接口功能代码。接线端子排实物图及具体电路接线图如图5所示。
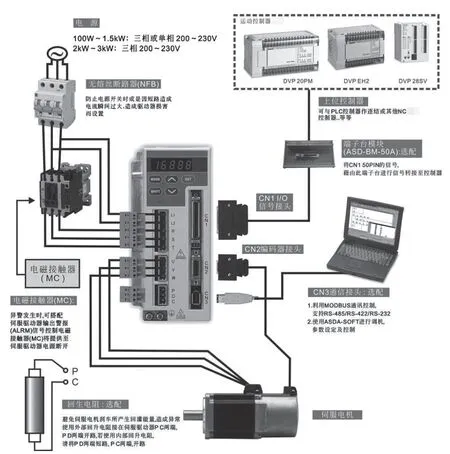
图4 伺服驱动器各功能口应用接线图
3 系统参数设置
3.1 参数计算
系统中定位控制距离、丝杠导程和伺服电机转数三者之间的关系如公式(1)所示。

其中,r为电机转数,L为定位控制的距离,l为误差距离,Ph为丝杠的导程。
对于误差距离l需要设置一定的脉冲数加以修正,以 IC800VMM02LNKSE25A型伺服电机旋转编码器每转产生10000个脉冲为例。脉冲数、误差距离、丝杠导程三者的关系如公式(2)所示。
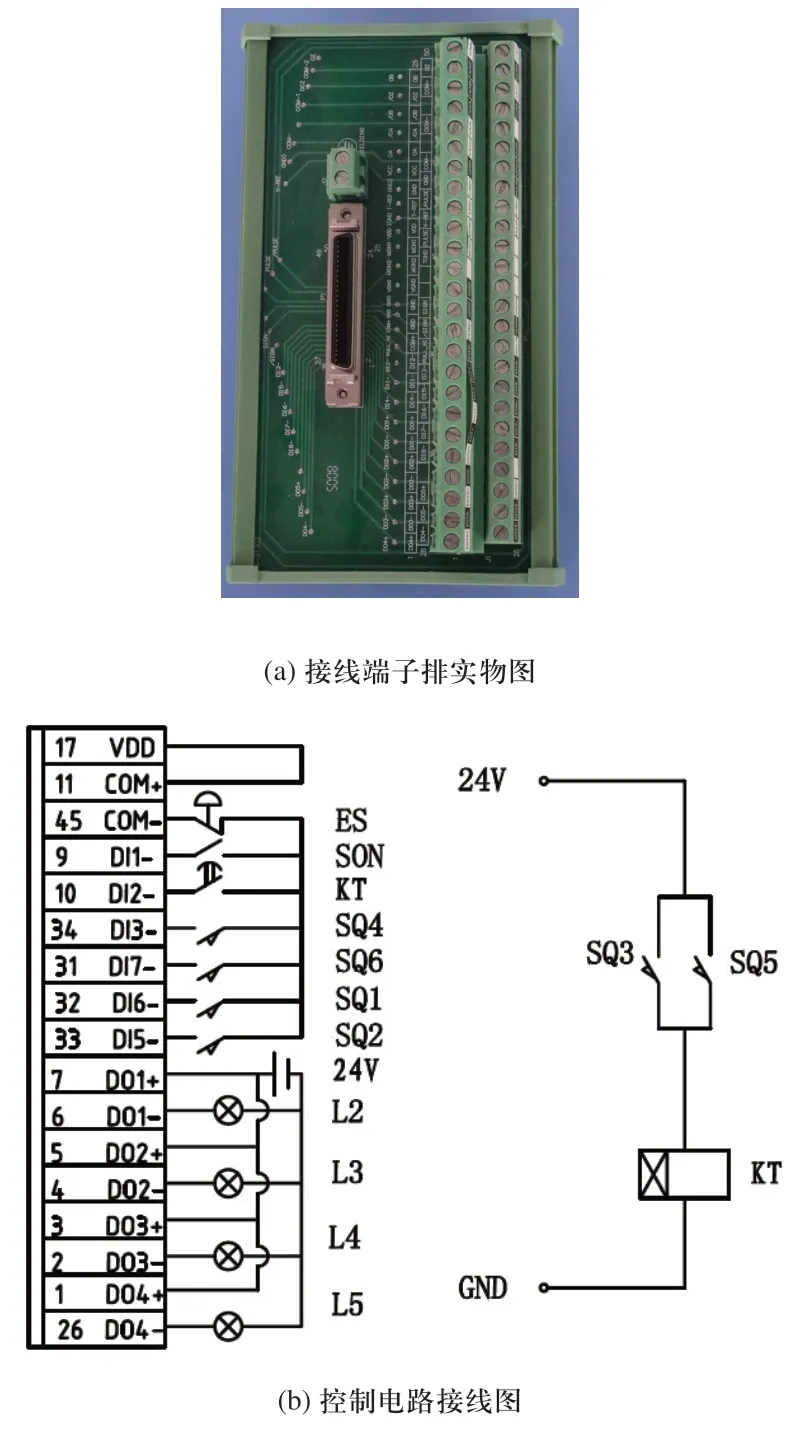
图5 接线端子排实物图及接线图
其中,n为脉冲数,l为误差距离,Ph为丝杠导程。
以原点位SQ2为基准,抓料位SQ3距SQ226mm,即:L=26mm,丝杠导程Ph=5mm,代入公式(1)计算得:r=5,l=1mm;l=1mm代入公式(2)计算得n=2000。
实际运行中,滚珠丝杠自身误差、机械行程开关触点误差、装配误差都影响控制精度。经过现场调试修订,最后r=5,n=2540。
机械手抓料位SQ3距放料位SQ5387mm,即L=387mm;代入公式(1)计算r=77、l=2mm;l=2mm代入公式(2)计算得n=4000。调试修订,最后r=77,n=4840。
3.2 参数设置
伺服驱动器参数是通过操作伺服驱动器面板进行设置的,设置数值保存在驱动器的内部寄存器中。伺服驱动器参数设置流程如图6所示。
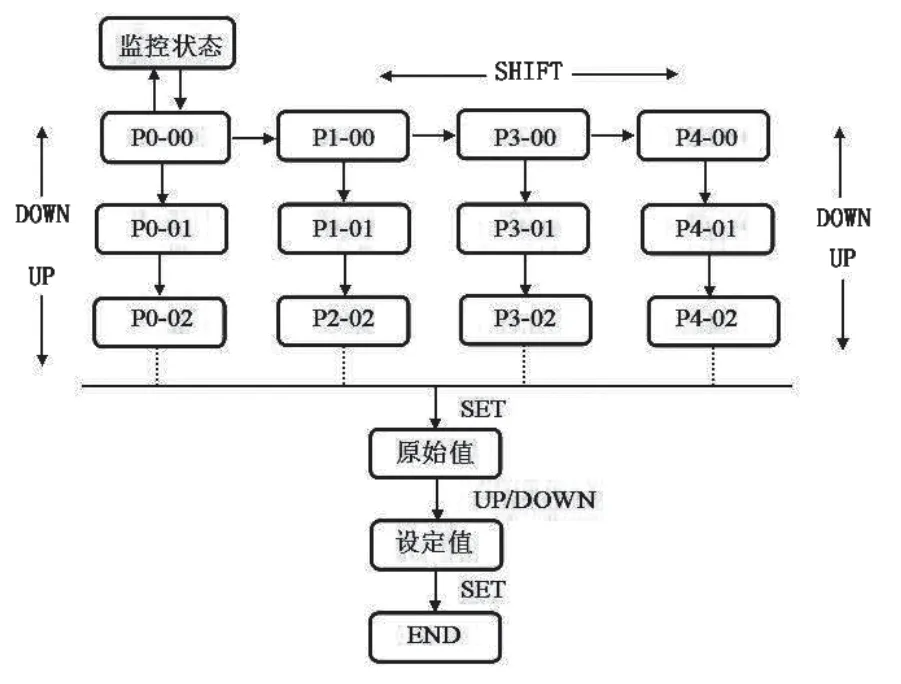
图6 伺服驱动器参数设置流程图
单轴位置控制系统中伺服驱动器的具体参数及设定值如表4所示。
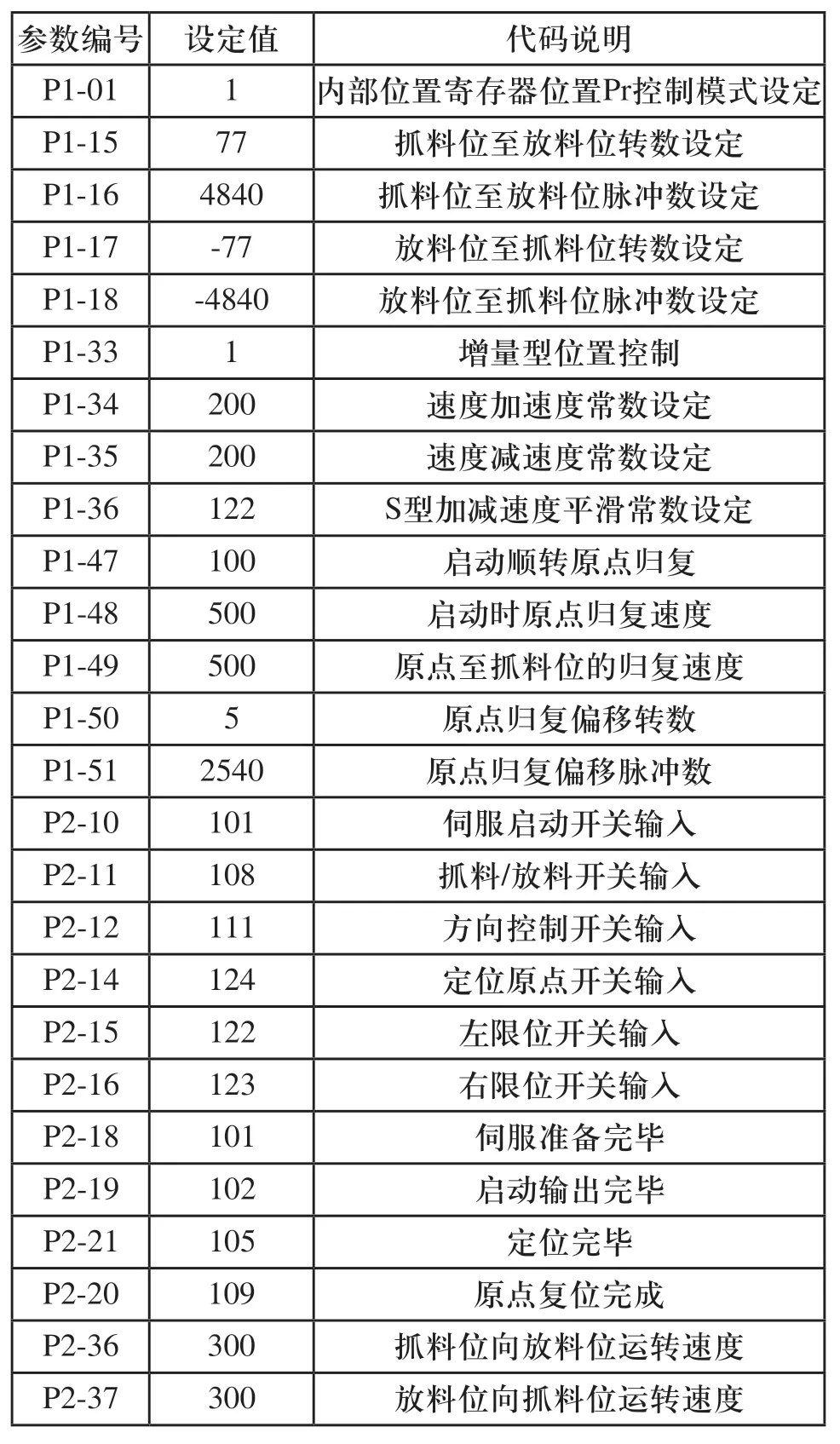
表4 参数设置表
4 调试中问题及处理
问题:机械手循环流程不稳定、时常失效。
原因分析:系统循环同时满足两个重要条件:1)伺服电机运转脉冲数达到伺服驱动器的设定值;2)伺服驱动器接收到返程脉冲。现场测试伺服电机和伺服驱动器质量没有问题,返程脉冲是由放料行程开关发出的也没有问题。分析原因是两个条件不同步,时间上条件2)早于条件1),而驱动器是在条件1)满足的情况下才去判断条件2)造成的。因此对于高精度的伺服驱动机构,机械装置和开关行程误差就不能忽略不计。
处理办法:设计通电延时型时间继电器作为调节部件。原理是利用行程开关控制时间继电器定时,以时间继电器的动合触点作为产生条件b的脉冲。有效地消除了行程开关直接作为动作指令开关所导致的故障,降低调试难度,提高了系统运行的稳定性。
5 结束语
充分利用伺服驱动器的功能,实现了伺服电机精确、快速、有效的定位控制。目前该装置已在“暖宝宝”自动发热贴包装设备上得到了较好的应用,成本低,维护方便、运行可靠。
[1]胡佳丽,闫宝瑞,张安震,李庆春,何亚东,信春玲.S7-200PLC在伺服电机位置控制中的应用[J].自动化仪表2009,30,12:38-41.
[2]吴於,李方圆.欧姆龙自动化产品在单轴控制系统中的应用[J].国内外机电一体化技术 2009,04:27-30.
[3]李国平,时圣勇,李宏伟,艾长胜,孙选.基于PLC的气动机械手实验装置的研制[J].液压与气动,2003,1:28-29.
[4]朱应煌.变频器在空气压缩机恒压控制中的应用[J].自动化仪表,2009,30,1:66-69.
[5]曹奇,龙稳,李亚娥,李涛.伺服驱动器与传感器在缝制设备中的应用[J].机电产品开发与创新,2011,24,1:41-42.
[6]苏义鑫,张平.伺服系统实验装置的开发[J].武汉理工大学学报,2005,27,3:30-32.
[7]张晓杰,王君艳.基于触摸屏,PLC及伺服驱动器的伺服系统[J].微特电机,2010,3:53-54,58.
[8]吕振,何武林,姚刚.基于PLC和交流伺服单轴控制系统[J].制造业与自动化,2011,33,9:99-101.
[9]杨红波,徐振越,肖和平.PLC伺服驱动器控制在飞锯机中的应用[J].机械与电子,2009,11:31-33.
