牵引式排水管道清淤机器人的研究
2014-12-18李成群马利平路春光李华明
李成群,马利平,路春光,李华明
(1.河北联合大学 机械工程学院,唐山 063009;2.承德钢铁集团有限公司,承德 067002)
0 引言
在我国,城市排水管道大多埋于地下,由于居民生活垃圾、工厂废物、基建工地泥浆等在排水管道中发生沉淀,淤积过多造成了管道堵塞,污水溢流,小则影响居民日常生活,严重时会打乱整个城市的正常生活节奏,因此必须对其及时进行清理和疏通。
目前,城市排水管道清淤主要采用的方法是:绞车清淤、高压水清淤、冲刷清淤、清淤球清淤和通沟机清淤等。其中绞车清淤和高压水清淤在我国最为常用。高压水清淤需用饮用水质的干净水,所以成本很高,而且这种清淤方法对于管径还有一定的限制。绞车清淤相对于高压水清淤来说成本低,对于管径无特定限制,但是需要人工来完成穿缆作业,井下的工作环境非常恶劣,给工人工作带来极大不便,危害工人的健康,甚至危及工人的生命[1]。所以为了改善传统清淤作业的工作环境,减轻工人的劳动强度,提高清淤作业的自动化水平,介绍了一种牵引式城市排水管道清淤机器人,此机器人采用一种新型机械结构和控制系统,为其更有效地完成排水管道的清淤工作提供了解决方案。
1 清淤机器人结构及工作原理
牵引式排水管道清淤机器人主要由清淤机器人本体、钢丝绳牵引装置、清淤斗、清淤斗举升翻转机构、监控系统和控制系统等部分组成,如图1所示。
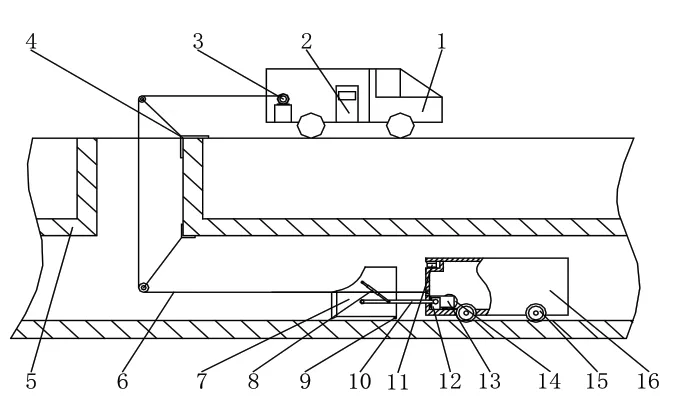
图1 城市排水管道清淤系统结构图
1)为保证清淤机器人清淤作业行程和灵活性,此清淤机器人车体,底部设有车轮,以自携的蓄电池作为动力源,采用电机驱动车轮的运动方式,带动清淤斗和牵引钢丝绳一起向远离窨井井口的方向运动至计划清淤的位置。
2)考虑到排水管道为圆柱状,为了与排水管道内壁的圆形轮廓相吻合,清淤机器人车体的车轮制成具有一定弧度的形状。车轮的材料采用耐磨、耐腐蚀的橡胶,并在轮子的表面制有凹凸花纹[2],以达到增加车轮与管壁间接触摩擦系数的目的,以此防止清淤作业过程中的打滑现象。
3)清淤机器人在管道内部清淤作业需要有足够的牵引力,为此设计了钢丝绳牵引装置,牵引钢丝绳的一端和清淤机器人车体连接,另一端通过牵引钢丝绳支架的过渡和安装于工程车里的牵引钢丝绳电机连接;用于拖拽清淤机器人车体连同清淤斗向靠近窨井井口的方向运动,在运动过程将淤泥收入清淤斗内,完成清淤作业。
4)受到排水管道形状的限制,清淤斗整体形状为横向放置的筒体,一端封闭为斗底,另一端为开口,开口的上半部为半圆形缺口,开口的下部为圆弧状坡口,清淤斗靠近管道内壁;清淤斗底部装有清淤斗轮,便于清淤作业时清淤斗在管道内部行走。
5)此清淤机器人采用了清淤斗举升翻转机构,工作原理为:
通过清淤机器人车体上的电机带动传动轴运动,进而带动连杆翻转(转过一定角度),传动轴通过轴承底座设置在清淤机器人车体上;电动缸两端分别和清淤斗、连杆铰接,通过电动缸伸缩杆的伸长和缩短使清淤斗进一步翻转;此机构的作用是清淤作业开始前,将清淤斗调整,使清淤斗开口位于和管道内壁相切的位置,以便清淤,清淤结束后将清淤斗举升并翻转,避免清淤斗内淤泥外泄。
6)清淤作业过程中要求机器人在存有污水和污泥的排水管道内部行走,这就要求机器人具备良好的密封性,所以此清淤机器人采用动静结合的密封方式,即对于清淤车体的密封采用密封垫片进行静密封,对于输出轴处的密封采用旋转格来圈进行动密封[3]。
7)清淤机器人车体上安装有配带雨刷的红外防水摄像头[3]。通过工业摄像头CCD实时采集排水管道内部的工作状况,采集的数据通过无线传输至位于地面上方工程车内部的上位机进行显示,操作人员根据显示画面实时进行操作。
2 控制系统的硬件设计
2.1 总体设计
本控制系统采用上、下位机的二级分布结构,控制组成框图如图2所示。上位机主要负责检查清淤机器人的运行情况并显示管道内部清淤作业现状。下位机选用S7-200系列CPU226的PLC即可,主要完成对直流电机、步进电机和电动缸的动作控制。直流电机M1用于驱动清淤机器人车体在排水管道内部空载运动,步进电机M2和电动缸用于驱动清淤斗举升翻转机构运动。具体操作过程为:当用升降机将清淤机器人吊送至排水管道的窨井井口后,按下启动键S1,启动清淤机器人行走机构驱动电机M1正转,当清淤机器人运动至计划清淤位置后,按下停止键S2,行走机构驱动电机停止转动。按下启动键S3,启动电动缸电机M3,使电动缸伸缩杆伸长至极限位置,电动缸停止运动,此时在电动缸的带动下清淤斗斗口朝向和连杆平行,随后按下启动键S4,举升翻转机构电机M2正转,将清淤斗放下,当清淤斗和管道内壁相切时,按下停止键S5,电机M2停止转动。接下来启动钢丝绳牵引装置电机正转,收缩钢丝绳,拖拽清淤车体连同清淤斗向靠近窨井井口方向运动,在运动过程中,将清淤斗前方的淤泥收入斗内。淤泥收集结束后,钢丝绳牵引装置电机停转,按下启动键S6,使电机M2反转,将清淤斗举起一定高度,按下停止键S5,电机M2停转。按下电动缸停止键S7,电动缸伸缩杆缩短至最短位置后停止运动,此时清淤斗反向翻转一定角度,使斗口朝上,避免斗内淤泥外泄。启动钢丝绳牵引装置电机正转继续带动牵引钢丝绳运动,拖拽清淤机器人车体连同清淤斗运动至窨井井口位置。

图2 清淤机器人控制系统组成框图
2.2 无线通讯
清淤机器人在狭窄的排水管道内部作业,若采用有缆作业,机器人就需要拖带动力电缆和信号电缆进行作业,当机器人行至一定距离时,电缆与管壁之间的摩擦力变大,甚至超过驱动电机的牵引力,严重影响清淤作业效率。相比之下,无缆机器人工作时所需能量由自携式蓄电池提供,省去了沉重的电缆,不但简化了系统的结构,而且机器人的作业行程及运动灵活性均得到提高[4]。基于上述优缺点,本清淤机器人采用无线通讯方式。设计采用西门子DTD433M无线收发模块,该模块是西门子PLC专用远距离数据传输模块,可以通过MDBUS协议与上位机进行数据的交互。

表1 PLC控制I/O功能分配表
2.3 PLC控制电路
2.3.1 PLC控制直流电机调速
清淤机器人在清淤作业过程中,当空载行走于计划清理的淤泥上方时,要求清淤机器人以较慢的速度行驶,当清淤机器人空载行走于已经清理干净的管道内部时,要求机器人快速行驶,以节省清淤作业的时间。机器人在管道内部以不同的速度行驶,通过PLC输出PWM信号控制机器人驱动电机转速来完成。
2.3.2 PLC控制步进电机运动
清淤机器人在清淤作业时要求清淤斗被放下,清淤斗装满淤泥后要求被举起。通过PLC控制步进电机M2正反向转动45°,带动连杆使清淤斗被举起和放下。此动作简单,只需PLC正反向输出一定量的脉冲数即可。
2.3.3 PLC控制电动缸运动
电动缸的作用是当清淤斗被举起后,电动缸伸缩杆缩短,使清淤斗翻转一定角度至斗口朝上的位置,防止斗内的淤泥回流至管道内部。当准备清淤作业时,电动缸伸缩杆伸长,使清淤斗复位。此动作通过PLC控制两个继电器KM1和KM2的通断电来完成。
2.3.4 PLC控制各I/O口功能分配表
S7-200系列PLC有两个PTO/PWM发生器,分别为Q0.0和Q0.1,因此I/O功能分配如表1所示。
3 控制系统的软件设计

图3 控制系统主程序流程图
系统采用模块化结构设计,控制系统主程序流程图如图3所示,主要包括主模块和功能子程序模块。
主模块主要完成系统初始化、与上位机建立连接和机器人测试运行。
功能子程序模块主要包括直流电机(行走机构)模块、步进电机(清淤斗举升机构)模块和电动缸(清淤斗翻转机构)模块。各功能子模块采用顺序控制,当接收到上位机指令后,严格按照程序指定顺序执行相应动作。
4 结论
设计的牵引式排水管道清淤机器人,简单可靠的机械结构保证了机器人在管道内部的自由行走,钢丝绳牵引装置的引用使得清淤机器人在有载清淤作业过程中具有足够的动力。模块化的控制系统软件设计,保证清淤机器人严格按照指定程序顺序执行相应动作。监控系统适时监控管道内部清淤作业情况,并通过无线通讯设备传输数据,进而通过S7-200系列PLC对直流电机、步进电机以及电动缸进行控制完成清淤动作。整个清淤系统大大提高了清淤作业的自动化水平,具有广阔的市场推广前景。
[1]杨清梅,王立权,王知行.一种新型排水管道机器人研究[J].机床与液压,2006(3):125-127.
[2]王丰,董小蕾,蔡玉强,段润保.中小直径排水管道缆控清淤机器人的研究[J].机械设计与制造,2008(4):165-167.
[3]嵇鹏程,沈惠平,邓嘉鸣,朱伟,许建国,计玉根.一种新型排水管道清淤机器人控制系统的设计[J].中国农村水利水电,2010(7):69-71.
[4]王丰,秦保新,刘学东.无缆式城市排水管道清淤机器人的通讯设计[J].机床与液压,2009(5):101-103.
