发动机和路面激励下的摩托车平顺性仿真分析及评价
2014-12-14汪雅丽
汪雅丽,雷 刚
(重庆理工大学 a.车辆工程学院;b.重庆理工大学汽车零部件制造及检测技术教育部重点实验室,重庆 400054)
摩托车乘骑平顺性是摩托车的重要性能指标之一。本文应用多体动力学分析软件ADAMS建立了基于路面和发动机激励下某企业摩托车整车刚柔耦合多体动力学模型并进行平顺性仿真分析,参照汽车振动舒适性的评价方法对其平顺性进行评价[1-2]。
1 整车刚柔耦合系统动力学建模
摩托车实际零部件结构相对较为复杂,摩托车动力学模型由车架、前后悬架、后叉、发动机、前后轮胎、方向把和人体座椅系统等9部分组成。本文研究的是摩托车驾乘平顺性,主要研究某摩托车在B级路面直线行驶工况下,由路面不平整度和发动机共同激励下整车的振动响应。本文对所建立的摩托车整车动力学模型做如下假设[3]:①在行驶过程中,车身只做垂直于地面的直线运动,车身相对于地面的侧倾不予考虑;②取消前叉相对于车架的转动自由度,不考虑摩托车转向;③没有建立链条传动的驱动力施加模型,而是将驱动力矩以运动的形式直接加在后轮上;④在模型的建立过程中,不考虑油箱和车身等覆盖件相对方位的变化,只考虑各自的重量和转动惯量,并且采用固定约束将各构件固定连接到车架上;⑤ 用理想约束替代各构件的实际接触,比如操纵架与车架之间用固定副约束,不计两者之间的相互碰撞作用效果;⑥摩托车前后减振器主要起支撑车体、减缓振动和冲击的作用,在模型中前后减振器用具有相应刚度和阻尼的弹簧代替;⑦ 用理想铰链代替后叉与车架之间的约束,两者之间可以相互转动,不能上下窜动和相互扭动。
1.1 多刚体模型的建立
首先借助CATIA软件建立摩托车的三维实体模型(如图1),根据摩托车实际结构和相对连接关系,利用虚拟装配功能将各构件进行虚拟装配,利用 CATIA与 ADAMS的数据交换接口,将在CATIA中装配好的三维数据结构导入到ADAMS多体动力学分析系统中,以获得几何模型。

图1 摩托车主要零部件装配
各构件保留各自的质量惯性信息和各构件之间相对位置信息。为使仿真结果更加真实、精确,创建球体来模拟人体。人体质量75 kg,其中60 kg作用在座椅上,左右手把各分布2.5 kg,左右脚踏各分布5 kg。球体与座椅、手把、脚踏之间均简化为固定铰链。通过对摩托车各零部件之间的运动约束关系和作用力关系的分析,以及基于对模型简化的假设,本文在ADAMS环境中建立运动约束关系如下[4-6]:①后叉与车架后臂支撑之间用Revoluted Joint连接,后叉只能绕安装轴转动;②前减振器内筒与方向把之间采用Fixed Joint连接,前减振器内外筒之间采用Translation Joint连接,前减振器内外筒在运动中始终保持前伸角不变;③在直线行驶仿真时,因为方向把与车架之间不考虑转向,所以方向把与车架采用Fixed Joint连接;④进行直线行驶仿真时,在车身上添加了3个面内约束Inplane Joint,而且每一个面内约束至少保证一个约束点始终保持在给定的平面内,确保摩托车始终在垂直于地面的平面内做直线运动,不发生侧倾;⑤前轮与前减振器外筒、后轮与后叉分别使用转动铰链相连;⑥由于摩托车发动机、油箱、坐垫和消声器实际上是通过螺栓刚性连接到车架上,故简化为固定铰链;⑦通过在前后悬架安装位置处建立弹簧单元模拟悬架,并定义其阻尼和刚度参数值。在ADAMS中建立多刚体动力学模型如图2所示。

图2 多刚体动力学模型
1.2 发动机建模
发动机的振动主要来自发动机气缸内的气体爆发压力以及活塞-连杆-曲轴机构因运动而产生的惯性力和惯性力矩,包括往复惯性力和旋转离心惯性力。本文以缸内燃烧爆发压力为激励源,对发动机进行运动学和动力学分析,计算发动机在工作状态下对整车的激励。发动机实体模型是将厂家提供的发动机CAD模型转换成Parasolid格式,将其导入到Adams中,在MSC.Adams中真实定义曲柄、连杆、活塞和发动机缸体的约束条件:箱体和曲轴之间、曲轴和连杆之间、连杆和活塞之间、飞轮和箱体之间均采用旋转副,箱体和大地之间采用固定副连接,活塞和箱体采用移动副,采用耦合副将飞轮和飞轮传动齿轮连接。建立如图3所示的发动机动力学模型。
1.3 刚柔耦合模型的建立
车架是摩托车的骨架。建模时,将车架视为刚体,就会忽略车架在外载荷下的变形和对路面不平度的传递性,这将对平顺性的分析结果造成较大误差。鉴于此,本文将车架视为柔性体进行分析。在HyperMesh软件的工作环境下建立车架有限元模型(1),导出bdf格式文件,通过Nastran软件将车架bdf格式转换为mnf的车架柔性体文件。通过ADAMS软件中的Flexible Bodies工具箱将多刚体动力学模型的刚性体车架替换成为柔性体车架,最后生成的刚柔耦合动力学模型如图4所示。
2 摩托车平顺性仿真平台建模
摩托车在路面上行驶时,振动主要由发动机等摩托车发动机和道路路面的不平整引起。这些振动最终作用于乘骑人员,对其产生复杂的生理和心理影响。因此,本文将建立基于发动机和道路激励的整车动力学模型。
2.1 仿真平台建模
为模拟摩托车在道路上的运动情况,在摩托车整车动力学模型基础上建立前后轮测试平台。该平台只能沿垂直方向运动,而摩托车整车做垂直方向的移动、俯仰运动。在车架与大地之间建立点在面上约束,测试平台和大地之间采用垂直方向的移动副,轮胎与测试平台之间的点建立在面上的约束副,并在前后测试平台上添加垂直方向SPLINE函数,通过ADAMS/Contact接触副来模拟轮胎与前后测试平台的接触关系。轮胎是弹性体,前轮与前测试平台接触的刚度系数取1 400 N/mm,阻尼为1.4(N·s)/mm,后轮与后测试平台接触的刚度系数取1 800 N/mm,阻尼为1.8(N·s)/mm,前后悬架的刚度分别为6 N/mm、15 N/mm,阻尼分别为0.3(N·s)/mm、0.6(N·s)/mm。建立基于道路模拟试验的摩托车平顺性仿真平台,如图5所示。选取手把、脚蹬、座椅3点的3个方向的加速度为测试点。

图5 刚柔耦合动力学模型
2.2 发动机激励的模拟
为模拟发动机的实际工作情况并施加气体作用力,将厂家利用燃烧分析仪测得的缸内压力曲线作为气体作用力施加到活塞和缸头上,并在曲轴上施加随时间变化的曲轴转角来模拟发动机的工作情况和对车架的作用力。
将试验测得的气缸压力曲线导入ADAMS中生成活塞压力曲线。发动机2 000 r/min时,测得曲轴在2 000 r/min平衡时阻力曲线均值为-8 074.87 N·mm,活塞压力曲线和平衡时阻力曲线如图6、7所示。然后将发动机压力曲线导入ADAMS中的AKISPL函数中,以此来定义在活塞和发动机体之间的相互作用力。在ADAMS中建立曲轴转角的测量MEA_ANGLE_1。分别在活塞和箱体上施加大小相同、方向相反的压力函数,以此来模拟发动机运转过程中的实际运动过程(燃油燃烧释放的气体压力对发动机的作用),即发动机对整车产生的激励。

图6 2 000 r/min时活塞压力曲线

图7 平衡时阻力曲线
2.3 B级路面激励的模拟
摩托车平顺性分析时,路面不平度是路面相对于某个基准平面的高度随道路走向而变化的程度,具有完全随机的性质。本文根据1984年国际标准化组织在文件ISO/TC108/SC2N67中提出的“路面不平度表示方法草案”和长春汽车研究所制定的GB7031《车辆振动输入——路面平度表示》标准相关计算公式。根据采样定理和离散的傅里叶变换,利用Matlab可编写随机路面谱,如图8所示。其中:手把各轴向的频率根据ISO5349推荐的6.3~1 000 Hz分析范围取 fu=1 000 Hz;座位处频率根据ISO2631推荐的0.5~80 Hz分析范围取 f1=0.5 Hz;车速ν=40 km/h。

图8 B级路面谱
将在Matlab中生成的车速为40 km/h的B级路面导入试验台与台座之间的平动副模型中,使试验台可以产生B级路面激励,最终建立整车平顺性仿真模型。
3 摩托车平顺性仿真
3.1 平顺性评价指标
目前国际上通用的关于振动的标准为ISO2631《人体承受全身振动评价指南》和ISO5349《人体接触手传动振动的测量和评价指南》2种标准[7]。ISO2631是全身振动方面标准;ISO5349是局部振动方面国际标准。其中,ISO2631-1:1997(E)适用于交通工具的振动环境;ISO5349-1:2001(E)适用于手持式动力工具及用手操作的机器的振动测试与评价。
ISO2631采用加权加速度均方根值aw来评价舒适性。将加权加速度均方根值aw换算为加权振级Law、aw和Law与人体主观感觉的关系,见表1。

表1 Lahw和ahw与人的主观感觉之间的关系(坐椅、脚踏处)
ISO5349认为人体对不同频率手传振动的敏感程度不同。在ISO5349的2001版本中推荐使用3轴向振动的总值评价指标。将手把振动总加权加速度均方根值ahw换算为加权振级Lahw、ahw和Lahw与人体主观感觉的关系,见表2。

表2 Lahw和ahw与人的主观感觉之间的关系(手柄位置)
3.2 摩托车平顺性仿真
ADAMS内部提供一些数值分析中常用的求解器,包括 ABAM、GSTIFF、Constant_BDF、WSTIFF等,其仿真时间和步长针对模型求解的不同要求进行设置,时间越长越能观察系统的长期运动学和动力学行为,而步长选择得越小就可以获得越精确的解答,但是计算时间也更长。不同的求解器有不同的特点。综合考虑计算精度和时间,选择Dynamics进行分析,试验参数设置时间为20 s,步长为10 000。本文以B级路面40 km/h车速模拟迭代驱动信号,同时添加发动机2 000 r/min爆破曲线压力函数产生的样条函数SKISPL作为输入进行仿真。由于篇幅限制,仅列出部分响应信号,如果图9~14所示。

图9 手把处X方向加速度时域曲线

图10 手把处X方向功率密度谱曲线

图11 脚蹬处Z方向加速度时域曲线

图12 脚蹬处Z方向功率密度谱曲线

图13 座位处Z方向加速度时域曲线

图14 座位处Z方向功率密度谱曲线
3.3 平顺性评价
应用本文3.1节的主客观评价指标,分别将测试点3个方向的功率密度谱曲线导入Matlab,按ISO2631和ISO5349的相关公式和加权系数计算出坐垫、脚踏和手把处的加权加速度均方根值aω,换算为加权振级 Lahw进行主客观评价,结果见表3。
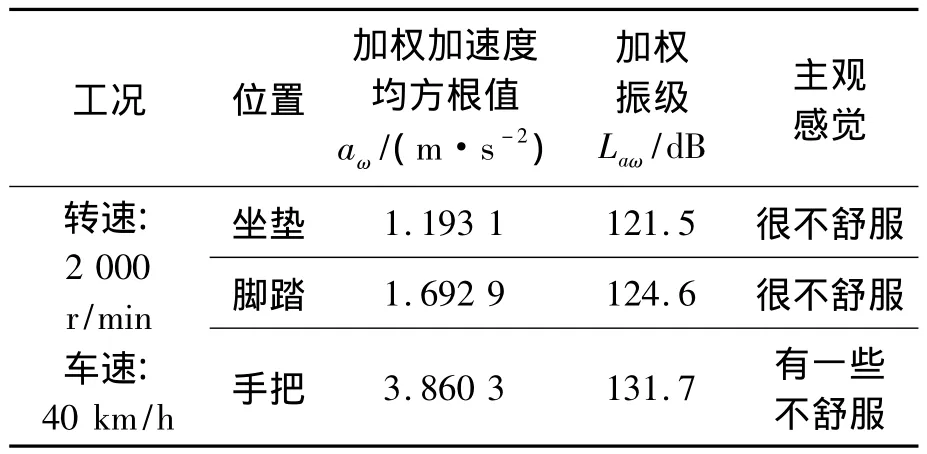
表3 顺性评价(频率加权)
从表3可以看出:根据频率加权加速度均方根值评价法,该摩托车以发动机转速为2 000 r/min,车速为40 km/h在B级路面上行驶时,坐垫、脚踏和手把处的平顺性分别表现为很不舒服和有些不舒服,其中手把处的频率和振级超过乘坐感觉舒适时的频率和振级较多。
4 结束语
本文对摩托车基于路面和发动机激励下的平顺性进行分析研究。应用多体动力学分析软件ADAMS建立了整车刚柔耦合多体动力学模型。在此基础上,以B级路面和发动机激励为输入,参照汽车振动舒适性的评价指标及其计算方法对其平顺性进行仿真分析及评价。仿真分析结果与实际驾乘感受相符合,为摩托车平顺性的改进奠定了基础。
[1]汪雅丽,雷刚.某两轮摩托车车架模态特性分析[J].重庆理工大学学报:自然科学版,2010,24(12):98-101.
[2]徐中明,张志飞,陈刚,等.摩托车平顺性主观评价分析[J].重庆大学学报:自然科学版,2007,35(6):5-8.
[3]张勇,欧健.汽车平顺性仿真模型及试验研究[J].现代制造工程,2012(6):38-41.
[4]邹喜红.基于道路模拟的摩托车平顺性研究[D].成都:西南交通大学,2010.
[5]林砺宗,潘大亨,傅招国,等.基于ADAMS的六自由度液压动感平台建模及运动学仿真[J].机床与液压,2012(12):166-169,174.
[6]钱士才,高宏力,李文涛.基于ADAMS的机床主轴刚柔耦合系统建立及性能分析[J].四川兵工学报,2012(6):69-70.
[7]徐中明,张志飞,李俊鹏,等.应用ISO2631和ISO5349评价摩托车平顺性[J].小型内燃机与摩托车,2006,35(6):5-8.