基于Fluent仿真的ORVR加油管液封设计
2014-12-14汪智,何仁
汪 智,何 仁
(江苏大学汽车与交通工程学院,江苏镇江 212003)
汽车排放污染物的来源主要有3个方面:尾气排放、曲轴箱排放和汽油蒸发排放。汽油蒸发排放约占整个汽车排放的20%,其中加油排放则是汽油蒸发排放的主要部分。美国从20世纪90年代开始开发车载加油蒸气回收(ORVR)系统,作为加油站STATE-II回收技术的补充。研究结果表明,ORVR系统能够回收90%以上的加油排放污染物[1]。2011年美国加利福利亚州开始实施零排放汽车(ZEV)计划,而ORVR系统是ZEV计划中重要的一部分。近年来,随着国内空气质量的恶化,国内法规对汽车排放的要求也越来越严格,许多学者和企业也开始研究和关注国外先进的排放控制技术,其中ORVR技术更是得到学界的重视。
ORVR系统与现有的燃油系统相比,需要对一些部件做出改进。其中,汽车加油管是重要的一部分。ORVR系统要求在加油时,加油管内必须密封,以阻止油箱内的汽油蒸气经过加油管从加油口逃逸到大气中。加油管密封主要有2种方法:机械密封和液封,目标都是在加油过程中让汽油在加油管内部形成一段液体密封,使气体不能通过。液封有2种形成方式:第一是安装单向阀。安装单向阀后,加油时在单向阀上方会有一定的汽油,当汽油量达到一定值时,才会打开单向阀;第二是利用加油管自身在加油时产生液封。利用加油管的内径和结构,在加油时使汽油在加油管内部形成一段液封。这种液封不需要使用单向阀,不仅能降低成本,而且能避免因单向阀的损坏而造成的损失和危险。
在利用加油管的结构形成液封时,目前主要依靠多次试验的方法和设计工程师的经验来确定加油管的结构,因而会增加试验成本以及延长开发周期。福特公司早在1997年就对汽车燃油系统和加油管进行了数值仿真,并将其引入设计过程中[2]。之后,Missouri-Rolla大学的研究人员利用Fluent软件对加油管的加油过程进行了仿真分析[3]。Fluent软件是目前流体仿真中的主流商用软件,可以对大部分CFD模型进行仿真分析。在设计过程中应用Fluent软件对模型进行仿真分析,能极大地降低设计过程中产生的试验验证成本,同时缩短开发周期。本文介绍了基于FLUENT软件的ORVR系统的自液封加油管的设计过程。
1 计算模型
1.1 几何模型
在加油管开发过程中,Fluent流体仿真主要应用在加油管结构和形状的设计过程中。ORVR系统中取消了传统加油管中的排气管,因此加油管结构相对简单。对于燃油箱可做简化,只需要保证加油管和燃油箱连接口的位置不改变。ORVR系统燃油箱一般有2个排气阀:一个是非ORVR燃油箱也具有的重力阀;一个是作为汽油蒸气主要通道的油气阀。本模型中燃油箱与碳罐连接的排气口被简化成一个圆柱形出口。在仿真分析中,所需要的只是燃油箱和加油管内部流场的几何模型(模型1),如图1所示。

图1 模型1的燃油箱和加油管几何模型
图1是根据某车型加油口位置、油箱接口位置、汽车底盘其他边界条件初步设计的加油管。因为目前国内加油站加油枪流速范围为30~60 L/min,所以国内非ORVR加油管内径一般为28~36 cm。带有ORVR系统的汽车的加油速度是15.9~37.2 L/min,故本模型中ORVR加油管内径初步设计为28 mm。ORVR加油管不需要传统加油管上的排气管,燃油箱内的汽油蒸气全部排向碳罐。因此,与碳罐相连的排气管口径比非ORVR加油管稍大,本模型中设计为20 mm。加油枪口直径为20 mm,插入加油管内62 mm。加油管有2个弯道,第1弯道的空间角度是115°,加油管总长890 mm。
1.2 模型的网格划分
使用ANSYS ICEM CFD网格划分软件对模型1进行网格的划分。ICEM CFD能够划分质量非常高的结构化网格。模型1的结构并不是十分复杂,因此先划分为3D六面体结构化网格,然后转成非结构化网格导入 Fluent中[4],网格如图2所示。

图2 模型1的网格
网格信息:Min=0.485 8,max=1,mean=0.860 4。网格质量的直方图值(histogram of quality values)见表1。
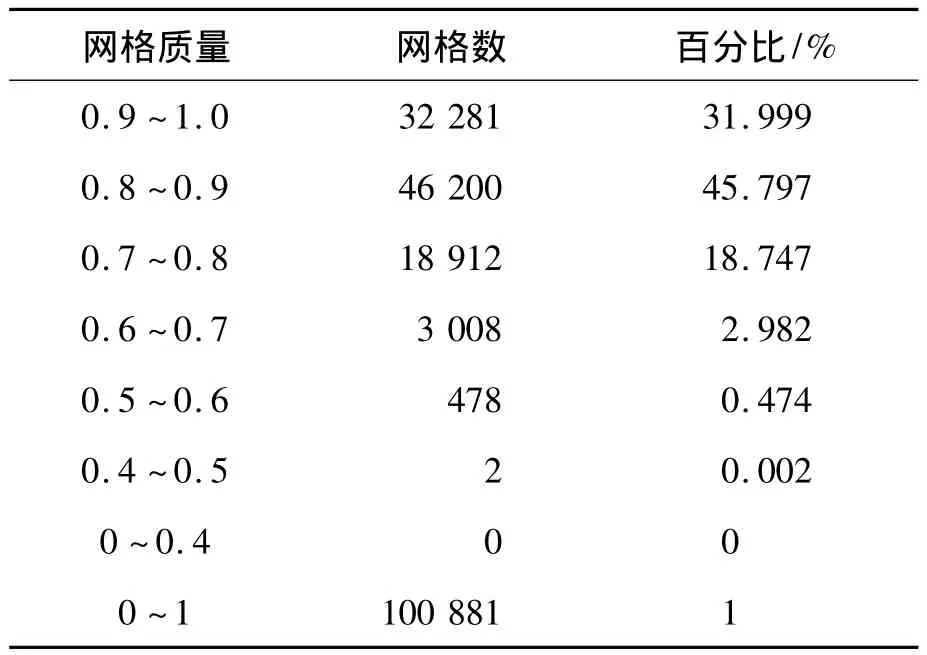
表1 模型1的网格质量分布情况
体积统计(Volume statistics)
Minimum volume(m3):7.841 570 e-11
Maximum volume(m3):3.690 565 e-06
Total volume(m3):3.663 499 e-02
表面积统计(Face area statistics)
Minimum face area(m2):1.635 104 e-07
Maximum face area(m2):2.761472e-04
由此可见,模型的网格质量非常好,完全能够满足Fluent计算要求。
1.3 仿真模型设定
1.3.1 模型设置
一般加油前,燃油箱内底部会有一定量的汽油液体,液体之上是汽油蒸气。本模型中假设燃油箱内加油前全部充满汽油蒸气,加油时加入的汽油是100%的液体,没有空气进入燃油箱,燃油箱内的汽油蒸气从排气口排向炭罐。加油过程一般仅1~2 min,因此可以假设整个模型在等温环境下进行,各部分之间没有能量的交换[5]。
Fluent中多相流模型中的VOF模型适用于分层流、自由面流动、灌注、晃动、液体中大气泡的流动等。在VOF模型中,气液两相共用压力和速度等体积平均变量,因此本模型多相流模型使用VOF模型。Fluent湍流模型中的RNG k-ε模型适用于急转弯、高湍流的情况。考虑到加油速度相对于加油管内径较高,故本设计中湍流模型选择RNG k-ε模型。模型中的流体介质使用Fluent数据库中默认的材料,其属性分别是:
Gasoil-liquid:ρ=830 kg/m3
μ=3.32×10-3kg/(m·s)
Gasoil-vapor:ρ=9.4 kg/m3
μ=7×10-6kg/(m·s)
对于模型边界条件的设置,模型将加油枪出口设置为速度进口(velocity-inlet),汽油以一定的速度从加油枪喷入加油管,进口汽油的体积分数设置为1;燃油箱和加油管的全部固体外壁面都设置为壁面(wall);排气管出口设置为压力出口,出口压力设置为大气压,即表压(gauge pressure)为0 kPa;进口和出口的湍流参数都设置为湍流强度和水力直径(hydraulic diameter),湍流强度根据经验值选择5%[6],水力直径取各自的管道直径。
1.3.2 求解器设置
Fluent压力-速度耦合算法中的PISO算法可以在每个迭代步中增加动量修正和网格畸形修正过程,能够获得更准确的压强以便更快地收敛。PISO算法通常使用在非定常的计算模型中,因此本模型中压强-速度耦合算法使用PISO格式算法。Fluent需要设置控制方程的离散化,必须选择每个方程的离散格式。压力差值PRESTO格式对于具有高涡流数、高Rayleigh数自然对流、高速旋转流动、包含多孔介质的流动和高度扭曲区域的流动非常合适,因此本设计压力差值选择PRESTO格式;动量方程和湍流方程使用精度较高的二阶迎风格式;体积分数方程使用Geo-reconstruct[7-8]。
在Fluent仿真开始之前,必须为流场设定一个初始值。设定初始值的过程被称为“初始化”。本设计中初始化程序如下:
Compute from:all zones;
Reference Frame:Relative to Cell Zone;
Gauge Pressure:0;
Others will change automatically
在仿真模型设置中假设加油开始之前燃油箱内全部是汽油蒸气,因此需要在初始化之后在patch里补充设置整个流体域内的汽油蒸气体积分数为1。
Fluent在每一个迭代步结束时都会对变量残差进行计算,残差的极限值代表计算的精度。但是在实际计算中,残差不可能达到0,因此需要设置残差极限值。本模型中continuity、x-velocity、y-velocity、z-velocity、k、epsilon 均设置为0.001,0.001的精度可以满足一般的仿真计算要求。
Fluent非定常计算需要设置计算步长和每一个计算步长内的迭代次数,合适的计算步长和迭代次数能使每一步计算结果快速收敛并且节省计算时间。根据网格大小、流体速度和若干次测试计算,确定Time Step Size为0.000 5 s,每一个时间步长内最大迭代次数(max iterations)为30次,这样模型能在每一个时间步内很快完成计算。模型总的仿真计算所需时间根据燃油箱体积和不同的加油速度计算,总步长是计算时间除以计算步长。
其他设定使用Fluent软件非定常计算推荐默认值。
2 Fluent仿真分析
在开始加油仿真计算前,要确定仿真的加油速度。美国标准规定具有ORVR系统的汽车的标准加油速度是15.9~37.1 L/min[9]。在进行仿真计算时,选择从高速加油开始。如果高速加油能形成液封,再进行低速仿真;如果高速加油不能形成液封,则说明模型不能满足要求。根据文献[10],加油过程中只是在开始阶段和最后阶段燃油箱内压力会发生变化,加油过程中大部分时间是保持稳定的。因此,如果高速和低速加油仿真都能在4~5 s内使加油管内形成液封,则说明模型为能够形成液封的ORVR加油管。
在模型仿真边界条件设定时,需要设定速度进口的流体速度,其单位是m/s。因此需要换算单位。公式为

式(1)中:v是速度进口的流体速度,单位是m/s;V是法规中的加油枪体积流量,单位是L/min;R是速度进口的半径。已知V1=37.1 L/min,V2=15.9 L/min,R=1 cm,得到 v1=1.97 m/s,v2=0.84 m/s。故高速加油仿真时速度进口的流体速度取2 m/s,低速加油仿真时速度进口的流体速度取0.8 m/s。
2.1 加油管模型的仿真计算
在加油仿真中,计算到10 s时加油管内的汽油体积分数云图如图3所示。

图3 模型1在高速加油仿真10 s时的汽油体积分数云图
为了更好地观察液体汽油的体积分数,云图中只显示体积分数大于90%的液体体积部分,小于90%的视为不能形成液封。由图3可知:管内并没有形成液封,尚有很大部分的空间没有液体汽油,因此可以认为此模型不能形成液封。
模型1的加油管结构不能产生液封,因此需要进行结构改进。为使加油管内形成液封,需要使加油管内汽油流线复杂以降低液体在管内的流速或者减小加油管内径。根据汽车底盘边界条件的限制,设计出2种不同结构:模型2和模型3。其中,模型2将模型1的内径减小至25 mm;模型3在模型1的第1弯道后又增加1个弯道,使加油管有3个弯道,第2弯道的空间角度是138°,如图4所示。模型2和模型3的网格划分参照本文1.2节中对模型1的网格划分,网格质量和网格数量与模型1相差不大。

图4 模型3的几何模型
模型2和模型3使用本文1.3节中的仿真模型设定。当速度进口的流体速度设置为2 m/s时,模型2在10 s时的汽油体积分数云图如图5所示。
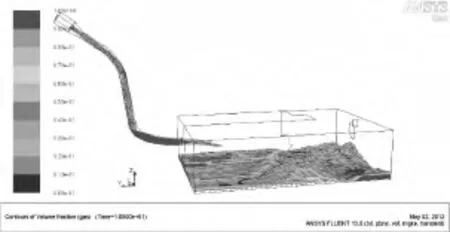
图5 模型2在高速加油仿真10 s时的汽油体积分数云图
仿真计算结果中,模型2在10 s时仍然没有形成液封,可以判断模型2不能形成液封。
当进口速度是2 m/s时,模型3在2.5 s时的仿真计算结果如图6所示,计算云图显示管内有液封形成,因此可以判断模型3在2 m/s的加油速度条件下能够形成液封。在进行低速加油仿真计算时,即速度进口的流体速度是低速0.8 m/s时,模型3在4.2 s时的仿真计算云图如图7所示。仿真计算结果显示:模型3在4.2 s时没有液封,且汽油量明显较少。可以判断模型3在低速时不能形成液封,因此模型3不满足要求。
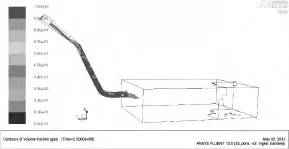
图6 模型3在高速加油仿真2.5 s时的汽油体积分数云图
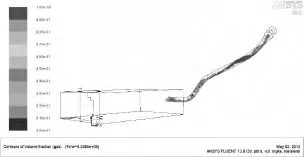
图7 模型3在低速加油仿真4.2 s时的汽油体积分数云图
由于模型3在低速加油时不能形成液封,因此可以减小模型3的内径,得到模型4。模型4的结构和模型3相同,只是内径减小为25 mm。模型4使用本文1.2节中的网格划分方法和本文1.3节中的仿真设定。当边界条件中速度进口的流体速度是2 m/s时,在1.46 s时的汽油体积分数云图如图8所示。
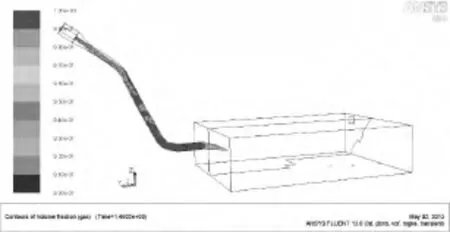
图8 模型4在高速加油仿真1.46 s时的汽油体积分数云图
从图8的仿真计算可知:1.5 s时模型4在2 m/s时形成液封。
当边界条件中速度进口的流体速度是0.8 m/s时,模型4在3.5 s和5 s时的体积分数云图分别如图9和图10所示。
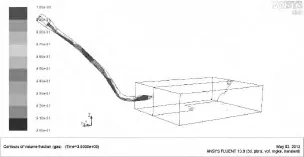
图9 模型4在低速加油仿真3.5 s时的汽油体积分数云图
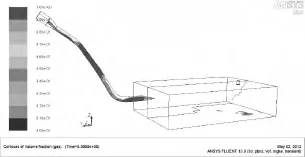
图10 模型4在低速加油仿真5 s时的体积分数云图
由图9和图10中的仿真分析结果可以看出:低速时,模型4在3.5 s时在第1弯道和第2弯道之间的直段内产生一段的液封;在5 s时,该直段内会产生明显的液封。因此,可判断模型4在高速和低速时均能及时形成液封,可以认为是自液封加油管。
2.2 仿真结果分析
由以上分析可知:模型1和模型3的内径是28 mm,两种结构都不能形成液封;模型2内径为25 mm,但结构简单,只有2个弯道,在高速加油时不能形成液封,效果更差,因此可认为弯道结构对液封的影响较大;模型4内径是25 mm,结构复杂,有3个弯道,在高速加油时和低速加油时均能在5 s内形成液封,且液封段较长,液封效果明显,能够满足ORVR加油管液封要求。
3 结束语
在本研究中,将Fluent软件应用到ORVR加油管自液封的设计中,能够从仿真云图中直观地看到有无液封的形成。从仿真过程可以看出:要想形成液封,首先需要降低汽油在加油管中的流速,并增加加油管的弯道设计;其次是需要减小加油管的内径,使汽油形成液封。这2个因素相互联系。一般的经验设计和试验验证浪费大量时间且很难得到结果,而Fluent软件的仿真分析能够很好地解决这个问题。它可以随时改变加油管内径和结构形状进行计算以满足ORVR系统的要求。此外,Fluent软件的仿真计算既能应用在ORVR加油管设计中,又能应用在普通加油管设计中。
[1]蔡锦榕,何仁,韦海燕.控制轿车加油排放的ORVR技术综述[J].车用发动机,2009(2):1-5.
[2]Sinha N,Thompson R,Harrigan M.Computational Simulation of fuel shut-off during refueling[S].SAE Paper 981377,1998.
[3]Banerjee R,Isaac K M,Oliver L,et al.A numerical study of automotive gas tank filler pipe two phase flow[J].E-valuation,2001,2013:4-8.
[4]纪兵兵,陈金瓶.ANSYS ICEM CFD网格划分技术实例详解[M].北京:中国水利水电出版社,2012:154-205.
[5]Reddy S R.Mathematical models for predicting vehicle refueling vapor generation[P].2014-10-05.
[6]陈家庆,张男,王金惠,等.机动车加油过程中气液两相流动特性的CFD数值模拟[J].环境科学,2011,32(12):3710-3716.
[7]李鹏飞,徐敏义,王飞飞.精通CFD工程仿真与案例实战[M].北京:人民邮电出版社,2011:186-196.
[8]任光远,杨海青.某型活塞发动机气道稳流试验台测试与CFD仿真[J].重庆理工大学学报:自然科学版,2012,26(2):11-16.
[9]Instrumentation and Techniques for Vehicle Refueling E-missions Measurement[S].SAE J1045.
[10]FACKRELL S,MASTROIANNI M,RANKIN G W.Model of the filling of an automotive fuel tank[J].MATHEMATICAL AND COMPUTER MODELLING,2003(38):519-532.