同步变桨系统一致性问题研究
2014-12-14黄悦超凌志斌曹云峰李睿
黄悦超,凌志斌,曹云峰,李睿
(上海交通大学 电力传输与功率变换控制教育部重点实验室,上海 200240)
0 引言
风能是清洁、可再生、蕴藏量大的新型能源,是世界上最具增长潜力的新型能源。随着能源的紧缺问题越来越严重,变桨距控制技术作为风力发电系统的关键技术之一,已成为世界各国能源技术领域研究的热点[1]。风力机组的变桨系统分为液压变桨和电动变桨两大类。电动变桨应用比较广泛,而液压变桨系统存在非线性、容易泄漏等缺点,在机组安全运行和检修方面,电动变桨具有比较大的优势。
目前,国内外风电变桨距控制主要有二种方法,即同步变桨距控制和独立变桨距控制[2]。同步变桨距控制是在主动失速型机组的基础上发展起来的,也是目前世界范围内应用最广、最为成熟的技术。同步变桨系统通过保持叶片的最佳攻角,即保证风机获得较好的气动性能,从而使变桨控制的风电机组有可能在不同风速下始终保持其风轮能量的最佳转换效率,使高速传动主轴输出的功率最大。
但是,由于风机各风轮叶片在实际运行中受力情况是不同的,导致变桨过程中桨叶位置会出现偏差,可能会影响风机的输出功率和风机运行的安全稳定性能。本文就统一变桨系统中3个桨叶实时位置的一致性问题进行分析,并提出了加入速度调节器的方法,通过MATLAB仿真和实验来进行验证[3]。
1 变桨系统性能要求
由于风场所处位置的特殊性,风机工作的环境十分恶劣。变桨系统长期在高温或低温下工作,维护困难,对于其有较高的可靠性要求。为了保证平稳控制风机功率,风力机组在正常运行时要求变桨速度达到5°/s~7°/s。在风力机组出现故障需紧急停机时,原则上要求在机械部件允许的应力下,变桨加速度和速度越快越好,在0.8 s内从静止加速到最大速度8°/s~10°/s。为保证功率控制的精度和稳定性,位置误差要求在0.1°以内[4-5]。
由于桨叶在不同桨距角受到的力不同,风力机组3个桨距角不同步将造成风轮的不平衡,严重时会对风力机组的安全运行造成影响。因此对3个桨叶位置定位精度及运动过程的同步性有一定要求,要求同步误差小于1.5°。
2 影响同步变桨的因素
由于风速在高度上存在与高度相关的切变,风速在整个风轮扫掠面内是不相同的。风速会随高度的增加而增加,增加的程度是由风的切变现象决定的。计算风速的高度切变一般用的公式为统计公式。

式中V0距地面H0米观测到的风速,H0为测的风速V0时所在高度,一般H0的值为10 m,V是高度H的风速,H为风速V时的高度。
统计公式在统计计算上是基本准确的,它的缺点是对地面粗糙度长度因素考虑不够。考虑地表面粗糙长度z0后,上式变为以对数法表示如下[6]:

此式适用范围为30 m~50 m高度。H和H0为距零风速平面的高度。
对n取值计算时可按下式:

目前,WM级风机高度一般都在60~90 m左右,与之相对应的桨叶直径也有30~40多米,风轮的最高与最低点的高度差还是比较大的,不能忽略由于高度差而引起的风速变化。
假定桨叶处于静止状态,令空气以相同的相对速度吹向叶片,作用在桨叶上的气动力将不改变其大小。由此可知,气动力只取决于相对速度和攻角的大小。
由于风机风轮扫掠面内风速的不同导致实际运行中的风机叶片在一个扫掠面内的尖速比是不同的[7],按照升力系数和攻角以及阻力系数和攻角的关系可以知道各叶片得到的升力和阻力是不同的,这样风机在运行中就存在额外的阻力差。尤其是在实际运行中,风机桨叶处于上、下位置时所得到的升力存在明显的不同,即叶轮运行中存在额外阻力不同,会导致电动变桨过程中电机负载力矩不同。变桨过程中速度不一致,导致3个桨叶的位置出现一定的差值,会影响风机运行的性能。
3 同步方案
为避免三个桨距角不一致造成的对风机运行的不利影响,可以采取以下两个方案之一加以解决。
方案一
从硬件的角度,功率大的电机设计时的转动惯量也比较大,对于同一负载转矩来说,提高电机功率可以缩短电机到达要求转速的时间。但是这一方法对于功率的充分利用上来说,有点浪费,功率因数和效率都不高,且造成电能浪费。而对于轮毂这种较为狭小的安装空间,此方案受到一定的限制。
方案二
通过加入合适的控制策略加以解决[8]。在速度给定时加入速度调节模块,增加3个桨叶之间的运动一致性。这种控制策略的主要思想是将某一台电机的速度反馈同其它电机的速度反馈分别作比较,然后将得到的偏差相加作为该电机的速度补偿信号,增益用来补偿各个电机之间的转动惯量的不同[9-10]。对于轴i的反馈信号为:式中 Δωi为反馈的转速矫正量;ω1,ω2,ω3分别为轴 1,轴2,轴 3的转速值;k1,k2,k3为增益调节参数。

这种控制策略能够保证同步性的精度要求,并且适合多电机使用,符合同步变桨一致性的要求。
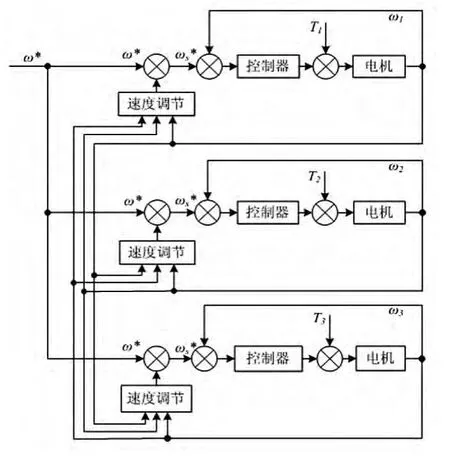
图1 增加速度调节模块的控制策略
4 仿真验证
仿真中,采用永磁同步电机三环控制系统,位置环采用PI调节,速度调节采用变频调速,SPWVM矢量控制方式。电机额定功率6.6 kW,额定转矩30 N·m,过载转矩90 N·m,额定转速2 100 r/min。
考虑到桨叶处于不同位置时,存在不同风阻。桨叶上收到的阻力不同,电机的负载转矩也不同。给定的负载力矩按照正弦量T=45+30sin(wt+ϑ)变化,三个桨叶对应的变桨负载力矩初始角分别设为 π/6,5π/6,3π/2,周期为 3πs(9.4 s)。给定最大转速为2 100 r/min,目标位置为90°。
从图2没有采用同步控制策略时的3个电机转速曲线中,很明显可以看出由于负载不同,直接影响到电机从启到达额定转速的时间,3个轴分别在不同时间达到给定转速,而之前的速度差则会使得3轴的位置产生偏差。
从图2中的3个轴位置曲线,可以看到由于转速的不同,影响到了位置的一致性。两轴之间最大位置的差值达到了3°,在这种情况下,桨叶力矩会产生严重的偏移,使得杆塔发生倾斜震荡,甚至严重的会导致风机倒塌。
通过提高电机功率的方法,使得原本达到给定转速较慢的电机能够更快的达到给定转速,缩短达到给定转速的时间。仿真中,采用的电机改为额定功率9.9 kW,额定转矩41.4 N·m,额定转速2 300 r/min。
图3为大功率情况下仿真转速和位置波形,与原转速波形比较,可以看出对原本较快到达额定转速#3轴而言没有有任何改变,但是对于转速上升比较缓慢的#2轴有明显的改善,#2轴到达额定转速的时间也缩短了,使得3轴到达指定位置的时间相当一致。
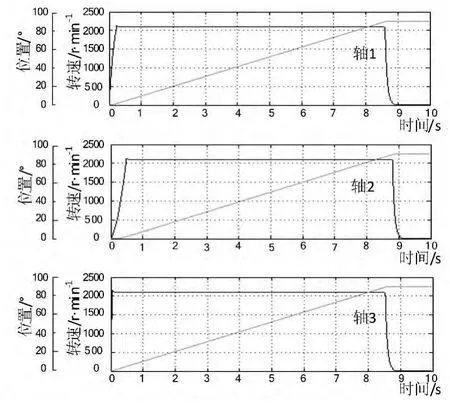
图2 原始情况下仿真转速和位置波形
由于转速差的减小,位置差也明显减小了,说明通过增加电机功率可以解决由于负载变化,引起的桨距一致性问题。速度响应性能和一致性的提高使得位置差可以保持在0.05度之内。

图3 大功率情况下仿真转速和位置波形
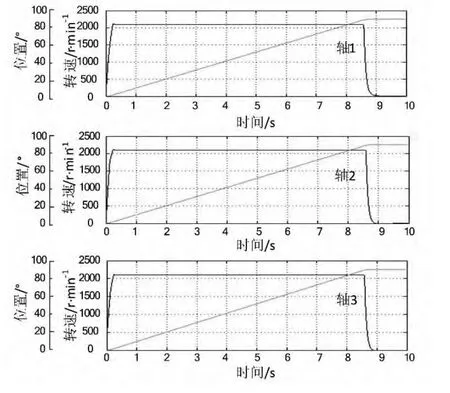
图4 改进情况下仿真转速和位置波形
在速度环的速度给定输入前加入速度调节模块,该电机与另两个电机的转速差分别乘上一个比例系数的总和作为速度调节模块的输出,这样可以减少3个轴之间的速度差,从而达到减小位置差的作用。从图4中可以看到原本上升速度较快的#3轴转速变化变慢了,而原本上升速度较慢的#2轴转速变化变快了。因为功率的问题限制的原因,无法使得3个轴都跟上#3轴,无法将时间缩短到原来#3轴到达给定位置的时间。
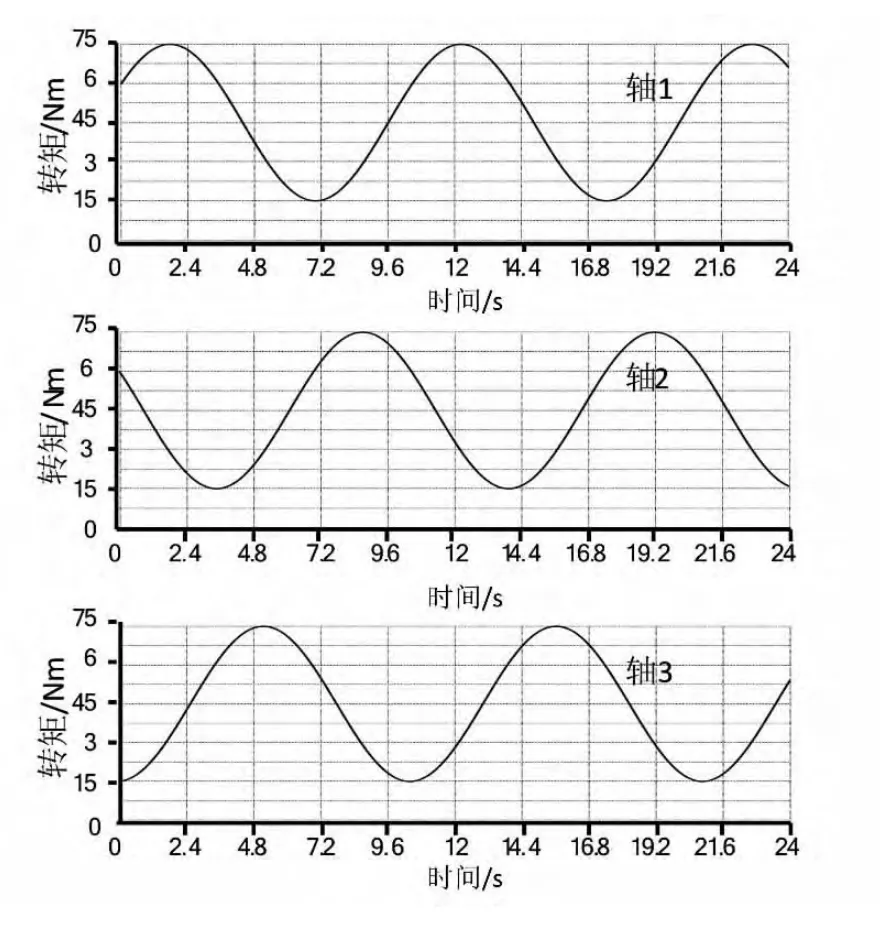
图5 3轴的转矩变换波形
5 平台实验
本实验平台由伺服控制和负载运行两部分组成。主要的设备组成是永磁同步电机,减速齿轮箱,磁粉制动器,PLC和伺服驱动器。PLC实现位置环控制以及状态监测功能,伺服器实现速度环和电流内环控制,变负载通过磁粉制动器来实现,电机的实际参数和之前仿真时所用的参数一致。进行变桨一致性实验时,所有的参数和设置与MATLAB仿真是完全一致。
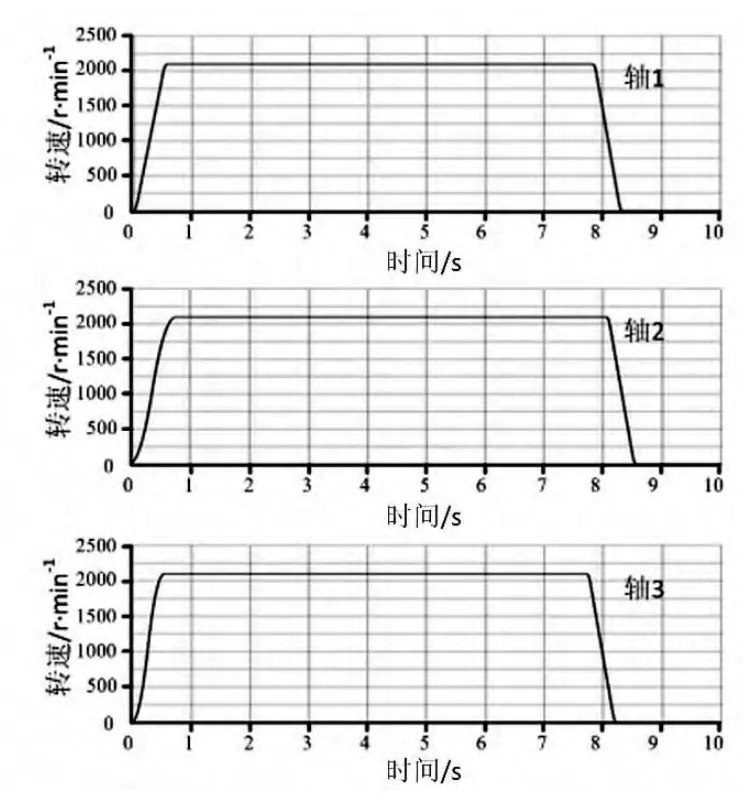
图6 (a) 原始情况下实际转速波形
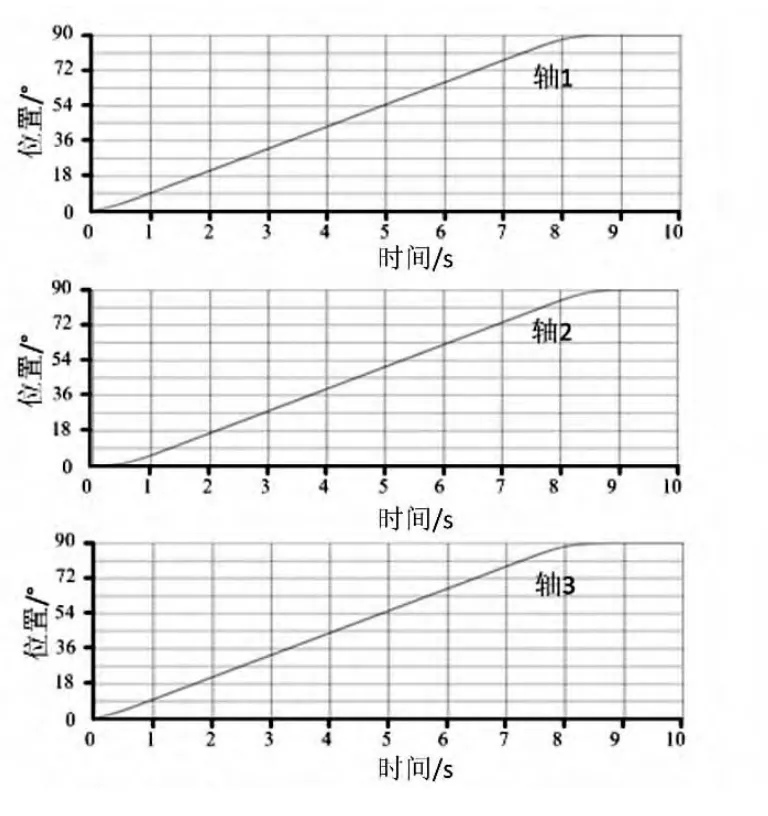
图6 (b) 原始情况下实际位置波形
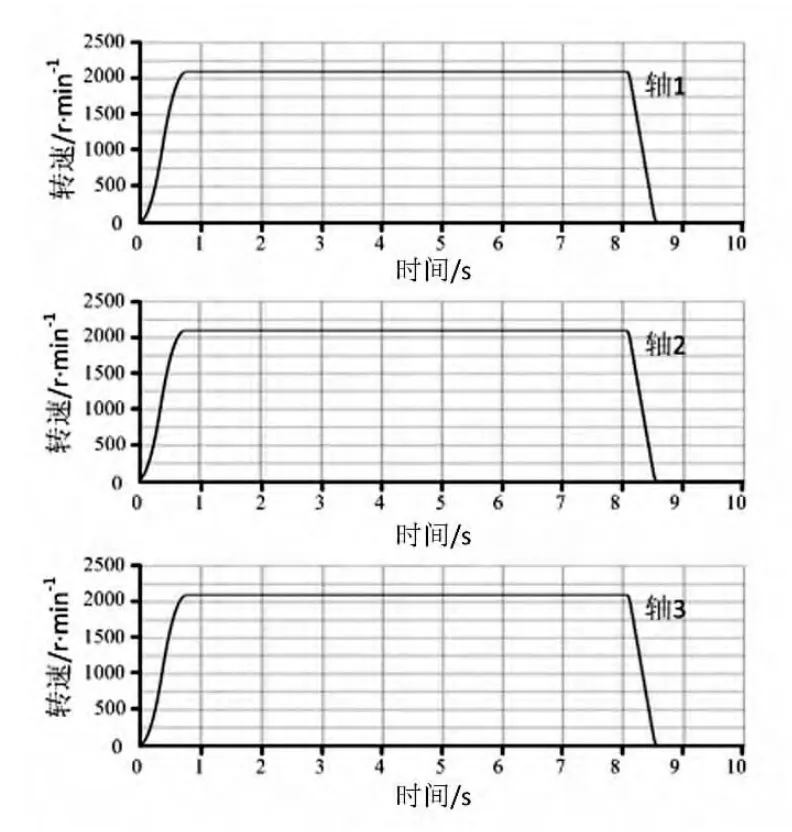
图7 (a) 改进情况下实际转速波形
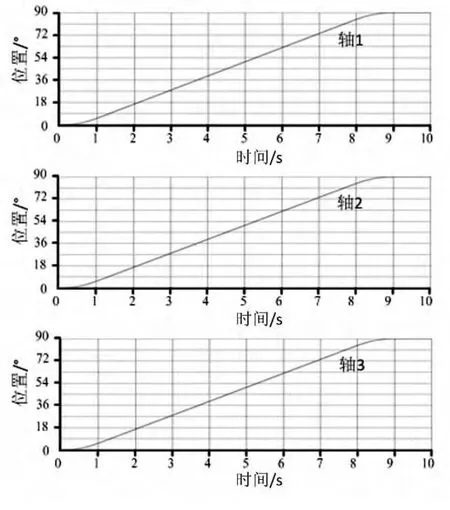
图7 (b) 改进情况下实际位置波形
PLC通过电压输出来控制电源转换器来为磁粉制动器提供电流输入,电压与负载输出关系为 T=100×V,电压输出如图5所示。
在未加入速度调节模块前,3个轴的转速和位置有一定的偏差,其曲线如图6(a),6(b)所示。从图6(a)中可以看到3轴到达额定转速的时间不同,最快与最慢的相差了0.3 s左右,也就是这导致了,位置差最大处出现了2.1度的偏差,也就是#2轴达到额定转速的时候,如图6(b)所示。
加入速度调节模块后,3个轴的转速和位置曲线如图 7(a),7(b)所示。3个轴基本可以同时达到额定转速,位置偏差也就消除了。当然整体到达指定位置的时间比原来最快的轴所花的时间要多,这是因为电机功率和伺服控制限制,也是为了确保一致性性能。
6 结束语
本文针对同步变桨中由于桨叶位置不同而引起的风速不同,即受到的阻力不同,分析桨叶受力情况,根据同步变桨运行的性能和安全性要求考虑,对同步变桨中桨叶位置不一致的问题进行分析,并提出了从软件上增加一个速度调节模块,改变转速环的给定转速来实现同步的解决方案。相比增加伺服电机功率的硬件解决方案,其不增加设备体积,成本低。按照实际参数进行的仿真和试验,验证了本文所提出的解决方案的可行性,对于变桨不同步有着明显的改善。
[1]曹野.兆瓦级风力发电机组电动变桨距控制策略的研究[M].沈阳:沈阳工业大学,2010.
[2]张纯明.大型风电发电机组独立变桨距控制策略研究[D].沈阳:沈阳工业大学,2011.
[3]叶成城,曹云峰,蔡旭.兆瓦级风机电动变桨距系统的设计与实现[J].电力电子技术,2012,46(8):101-103.
[4]窦真兰,王晗,凌志斌,等.电动变桨距控制系统设计与实现[J].电力电子技术,2011,45(7):1-4.
[5]凌志斌,窦真兰,张秋琼,等.风力机组电动变桨系统[J].电力电子技术,2011,45(8):101-103.
[6]吴永忠,苏志勇.关于风力机异步变桨的初步研究[J].应用能源技术,2007,24(3):39 -41.
[7]窦真兰,王晗,凌志斌,等.基于叶素理论的风力机模拟系统研究[J].电工电能技术,2011,30(3):1 -5.
[8]刘坤.多永磁同步电机同步控制策略的研究[M].湖南:中南大学,2011.
[9]杨晨娜,多电机同步控制方式的研究[J].知识经济,2011,13(12):99-100.
[10]王永平.多电机同步控制策略在液体药品灌装机中的应用研究[D].湖南:中南大学,2009.