基于逐像元和面向对象分类方法的分析研究
2014-12-13靳欢欢
靳欢欢
(河南理工大学测绘与国土信息工程学院,河南焦作 454000)
0 引言
随着遥感技术的迅速发展和高科技社会时代的需求,遥感影像数据成为数字智能地球的主要数据来源之一,随之而来的高光谱、高时空分辨率影像也越来越受人们欢迎。与中、低分辨率遥感影像相比,高分辨率影像在景观结构、形状、纹理和细节等方面都具有非常突出的信息,能够在较小的空间尺度上观察地表的细节变化。目前,遥感影像的分类可以采用逐像元分类或面向对象分类。逐像元分类主要考虑像元的波段光谱特征强度信息,但忽视空间结构关系和上下文语义信息特征。面向对象分类可以结合使用光谱、空间、上下文等更多特征信息进行分类。由于高分辨率遥感影像上地物的光谱信息较少,基于像元的分类方法并不能提供有效的专题信息。但面向对象分析方法可以在对高空间分辨率遥感影像分类时结合更多的特征,从而可以更有效地提取专题信息。另外,传统的逐像元分类是以像素为单元分类的,易造成分类精度低。面向对象分类的对象不再是单个像素而是由多个具有相关关联的像素组成的对象,不仅利用了影像的光谱信息,还利用了空间信息。本文以GeoEye 数据为实验数据,开展了如下研究:
(1)以监督分类和非监督分类评价逐像元方法在试验区土地分类的有效性;
(2)评价基于面向对象方法在试验区土地分类中的有效性;
(3)对于高分辨率影像,通过计算总体分类精度和Kappa系数比较逐像元分类和面向对象分类方法的分类精度。
1 试验数据特点
本次实验影像数据由GeoEye 卫星获得,GeoEye-1 卫星是美国的一颗商业卫星,于2008 年9 月从美国加州范登堡空军基地发射。GeoEye-1 是太阳同步轨道卫星,轨道高度684km,运行周期98min,该卫星携带高分辨率的CCD 相机。GeoEye 系列2 颗卫星,亚米级分辨率;GeoEye-1 全色影像分辨率0.41m,多光谱影像分辨率1.65m;其中,全色波长:450~800nm;多光谱中的蓝光波长:450~510nm;绿光波长:510~580nm;红光波长:655nm~690nm;近红外波长:780nm~920nm。简而言之,GeoEye-1 卫星具有分辨率最高、测图能力极强、重访周期极短的特点,在实现大面积成图项目、细微地物的解译与判读等方面优势突出。
2 逐像元分类方法
传统的监督分类和非监督分类都是基于像元的分类方法,分类处理时的最小单元是像元,主要考虑单个对象的光谱信息。
2.1 非监督分类
非监督分类是指人们事先对分类过程不施加任何的先验知识,而仅凭数据(遥感影像地物的光谱特征的分布规律),即自然聚类的特性,进行“盲目”的分类;其分类的结果只是对不同类别达到了区分,但并不能确定类别的属性。
ENVI 软件包括K-Means 和ISODATA 两种非监督分类方法。K-Means 是通过计算像元的聚类相似度对地物进行迭代聚类分析,而ISODATA 是使用最小距离技术对像元进行迭代聚合。可以看出,在这2 种方法中,迭代次数越多,得到的分类结果越精确,本试验中选取的迭代次数为6 次。非监督分类总体上一般分为4 个过程:执行非监督分类、类别定义、合并子类和评价结果。定义类别的根据可以通过在高分辨率图像上目视解译获得,也可以基于野外实地调查数据。本次通过目视判读将试验区分为耕地、林地、裸地、沙地、村庄、其他6 类。通过ENVI软件评价分类结果,其中总精度和Kappa 系数越大表明分类效果越好。从表1 中可以看出,Isodata 方法分类精度比K-Mean分类精度高。但总的来说都比较偏低,不能满足要求。
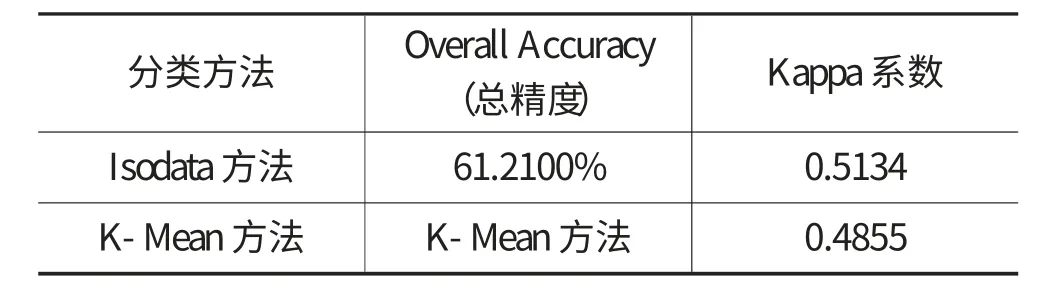
表1 非监督分类精度结果
2.2 监督分类
监督分类是利用训练样本(即先验知识)去识别其他未知类别像元的一种分类方法。ENVI 中监督分类的分类器有平行六面体、最小距离、马氏距离、最大似然、神经网络、支持向量机等。用户根据分类精度要求选择合适的分类器,选择不同的分类器需要设置的参数不一样,但是都需要训练样本。ENVI 中是利用ROI Tool 来定义训练样本的,也就是把感兴趣区当做训练样本,因此定义训练样本的过程就是创建感兴趣区的过程。训练样本的定义主要靠目视解译。定义好样本后可以使用ENVI 中的ROI 可分离性(Compute ROI Separability)工具来计算任意类别间的统计距离,这个距离用于确定2 个类别间的差异性程度。这个参数值的范围是0~2,大于1.8 为及格,数值越大表示类别间的可分离性效果越好。本次试验中计算的数值为1.914,表示本次选择的训练样本可分离性较好。
本文中选用了常用的4 种监督分类器:最小距离、马氏距离、最大似然、支持向量机对影像分别分类,然后对分类结果进行精度评价。这4 个分类器中图像的像元值意义分别为:到类中心的距离和、到类中心的距离、像元属于该类的概率、距分类超平面最近的像素。这4 种监督分类的精度评价结果如表2 所示。从表中可以看出,在监督分类中,支持向量机分类的精度较高。
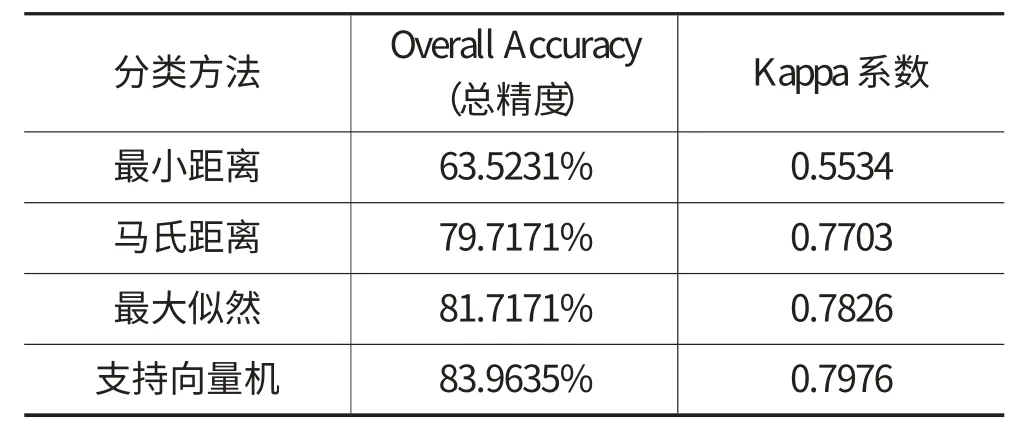
表2 监督分类精度结果
3 面向对象分类
面向对象分类是指根据影像的光谱信息及形状信息,设置一定的均质标准参数,将遥感影像进行分割以形成影像对象,每一个影像对象都是具有相似光谱特征的像素的集合。此方法不是以单个像素为分析目标,而是以影像中的像素集合为分析单元,充分考虑了对象和周围环境之间的联系等因素,借助对象特征知识库来完成对影像信息的提取。随着高分辨率遥感影像技术的发展,越来越多的遥感软件具有这个功能,本文运用的是ENVI 的EX 模块,是基于影像空间以及影像光谱特征的面向对象空间特征提取模块—Feature Extraction。EX 先对影像进行分割,然后针对分割出来的斑块对象,利用光谱、纹理和几何信息对目标进行分类和提取。
3.1 影像分割
影像分割是一种重要的影像分析技术,是指把影像分成各具特性的区域的技术和过程。比较常用的分割算法是多尺度分割法,多尺度分割是指从一个像素的对象开始进行一个自下而上的区域合并技术,小的影像对象可以合并到稍大的对象中。在这个聚集过程中,相邻的影像对象只要符合设置的异质最小生长的标准就合并,如果这个最小的扩张超出尺度参数定义的阈值范围,合并过程结束。在多尺度影像分割过程中要达到满意的分割结果,分割参数的选定很重要。选择高尺度影像分割将会分出很少的图斑,选择一个低尺度影像分割将会分割出更多的图斑,分割效果的好坏一定程度上决定了分类效果的精确度,我们可以通过预览分割效果(见图1),选择一个理想的分割阀值(范围是0~100),尽可能好地分割出边缘特征。本次试验中选择的分割阈值为40。

图1 影像分割预览图
3.2 分块合并
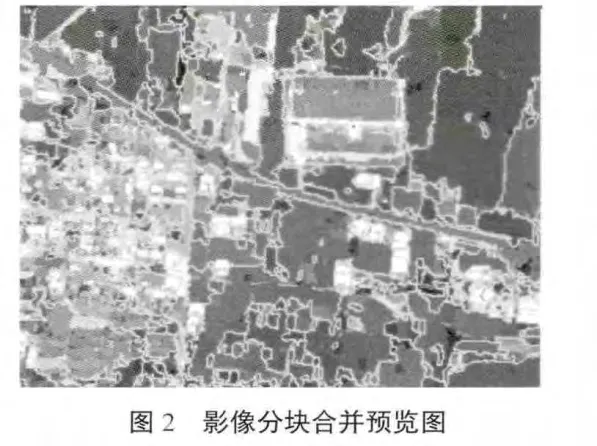
在影像分割时,由于设置的阈值过低,一些特征会被错分,一个特征也有可能被分成很多部分。我们可以通过分块合并来解决这些问题。同样也需要选择一个理想的合并阈值(范围是0~100),本次试验中选择的合并阈值为90(见图2)。
3.3 分类结果和精度分析
ENVI 的EX 中的特征提取方法有3 种:监督分类、规则分类和直接矢量输出。本文选择的是监督分类,这里的监督分类和上面提到的监督分类是有区别的,它不仅仅包括光谱信息,还包括空间、纹理等信息。从目视结果可以看出,面向对象的分类结果优于基于像素分类。面向对象的分类总体精度为89.2830%,Kapaa 系数为0.8516,明显高于之前的基于像素的分类方法的精度。图3 和图4 为面向对象和基于像元的分类结果图。总的来说基于像素的信息提取方法对高分辨率的影像信息提取效果不好,因为高分辨率的光谱信息不是很丰富,而基于像素的分类方法主要是根据地物的光谱信息特征来进行分类的。另外,传统的基于像元的分类方法易受高分辨率影像局部异质性大的影响和干扰,同物异谱同谱异物的现象比较多并且存在大量的椒盐现象,分类结果也不易矢量化。而用面向对象的方法进行信息提取能够克服同物异谱同谱异物现象的影响,有效地消除了椒盐噪声,而且利用面向对象的方法提取的信息结果比用基于像素的方法提取的信息具有更好的目视效果。
4 总结
通过对分类结果的精度评定和目视判读,我们可以发现面向对象技术更适合高分辨率遥感影像的分类处理。因为基于像元的分类方法主要依据是像元的光谱特征。而高分辨率遥感图像的细节信息丰富,光谱信息较少,图像的局部异质性大。面向对象分类方法可以利用高分辨率图像上丰富的光谱、形状、结构、纹理、相关布局以及图像中地物之间的上下文信息对地物进行分类,具有较高的分类精度,而且使分类后的图像含有丰富的语义信息,便于解译和理解。对高分辨率影像来说,面向对象分类是一种非常有效的信息提取方法,具有很好的应用前景。
图3 面向对象分类图

图4 基于像元分类图
[1]邓书斌.ENVI 遥感图像处理方法[M].北京:科学出版社,2010.
[2]John A.Richards Xiuping Jia.遥感数字图像分析[M].张晔,张钧萍,谷延锋,等,译.4 版.北京:电子工业出版社,2009.
[3]祝振江.基于面向对象分类法的高分辨率遥感影像矿山信息提取应用研究[D].北京:中国地质大学,2010.
[4]韦玉春,汤国安,杨昕,等.遥感数字图像处理教程[M].北京:科学出版社,2007.
[5]汪秋来.面向对象遥感影像分类方法及其应用研究[D].南京:南京林业大学,2008.
[6]张俊,于庆国,朱晓东,等.面向对象的高分辨率影像特征选择研究[J].测绘科学,2011(3).