基于光谱信息和支持向量机的绿色植物检测方法研究
2023-04-29徐敏雅朱路生刘永华王苗林王慧
徐敏雅 朱路生 刘永华 王苗林 王慧


摘要:针对精准农业中靶变量施药时对植物靶标探测的实际需求,研究红色LED、蓝色LED和卤钨灯照射下基于光谱信息和支持向量机的绿色植物检测方法。分别在室外阳光直射、室外阴影和室内黑暗环境下采集三种光源照射下绿色植物样本和非绿色植物样本的反射光谱。研究常数1和标准差倒数1/SDev两种变量权重对支持向量机SVM模型精确度的影响,结果表明两种变量权重对线性核SVM模型的影响不大,但径向基函数RBF核模型在变量权重为1时效果较差,最低精确度只有51.85%,变量权重为1/SDev时所有RBF核SVM模型精确度较为正常,最低精确度为95.06%。之后建立变量权重为1/SDev的绿色植物检测SVM模型。结果表明,三种光源对于线性核SVM模型的性能影响较小,所有线性核SVM模型的F1-score均超过99.00%,其中卤钨灯照射下建立的SVM模型精确度达到100.00%,蓝色LED照射下建立的SVM模型F1-score最高,达到99.79%;RBF核SVM模型中效果最好的为蓝色LED照射下建立的模型,训练集和测试集F1-score分别为99.59%和99.17%。本研究结果可为开发基于主动光源的绿色植物探测传感器提供理论依据。
关键词:支持向量机;绿色植物;靶标探测;精准农业;光谱信息
中图分类号:S24
文献标识码:A
文章编号:20955553 (2023) 12013706
Research on green plant detection methods based on spectral information and
support vector machine
Xu Minya1, Zhu Lusheng1, Liu Yonghua1, Wang Miaolin2, Wang Hui1
(1. Jiangsu Vocational College of Agriculture and Forestry, Zhenjiang, 212400, China;
2. School of Agricultural Engineering, Jiangsu University, Zhenjiang, 212013, China)
Abstract:
Aiming at the actual demand for plant target detection during target variable pesticide application in precision agriculture, a green plant detection method based on spectral information and support vector machines was studied under the illumination of red LED, blue LED, and halogen tungsten lamp. The reflectance spectra of green and non green plant samples irradiated by three light sources were collected under outdoor direct sunlight, outdoor shadow, and indoor dark environments. The effects of constant 1 and 1/SDev variable weights on the accuracy of support vector machine SVM models were studied. The results showed that the two variable weights had little impact on the linear kernel SVM model, but the RBF kernel model had a poor effect when the variable weight was 1, with a minimum accuracy of only 51.85%. When the variable weight was 1/SDev, all RBF kernel SVM models had a relatively normal accuracy, with a minimum accuracy of 95.06%. After that, a SVM model for green plant detection with variable weight of 1/SDev was established. The results showed that the three light sources had a small impact on the performance of linear kernel SVM models, and the F1-score of all linear kernel SVM models exceeded 99.00%. The accuracy of the SVM model established under halogen lamp irradiation reached 100.00%, while the F1-score of the SVM model established under blue LED irradiation reached the highest, by 99.79%. The RBF core SVM model with the best effect was the model established under blue LED illumination, and the training set and test set F1-score were 99.59% and 99.17%, respectively. The results of this study can provide a theoretical basis for the development of green plant detection sensors based on active light sources.
Keywords:
support vector machine; green plants; target detection; precision agriculture; spectral information
0 引言
农作物生长过程中易受病、虫、草害影响,严重影响产量和品质。如防治不力,易造成大量减产甚至绝收,进而影响国家粮食安全[12]。我国针对病、虫、草害防治的植保作业仍普遍采用大面积均匀喷施化学药剂的方法,这一方面会导致农药的大量浪费,也会造成食品农药残留增加和环境污染问题。为控制农药用量,国内外都出台了相关政策和法规[34]。我国在2018年2月4日中央发布的一号文件《中共中央国务院关于实施乡村振兴战略的意见》中强调了化肥农药的减量增效。农药减量增效的有效措施之一为精准对靶施药,即根据传感器探测的植物靶标信息进行精准施药,无靶标处则不施药。通过这种间歇式的精准对靶施药,可有效提高农药利用率、减少农药使用量[5]。
精准对靶施药的关键在于靶标的探测,目前获取田间靶标信息的途径主要有光谱、图像和光谱成像等方法[6]。基于图像的靶标识别技术通过颜色、纹理、形状等特征结合机器学习方法不仅可区分植物和背景,还能区分作物和杂草,但算法往往较为复杂,处理速度一般,且易受环境光影响[7]。基于光谱信息的田间绿色植物识别技术通过作物、杂草和背景在可见/近红外波段的光谱差异区分植物和背景,该方法的处理速度较快、成本较低,在实际应用中具有较大潜力[8]。光谱成像技术通过融合光谱信息和图像信息能够精确检测出绿色植物且能将作物与杂草区分开来,但其设备成本较高、检测速度较慢,难以在田间进行实际应用[9]。光谱检测方法已被研究用于植物的检测和分类。在国外能检测绿色植物的光谱传感器已经商业化,如美国的WeedSeeker、荷兰的Weed-IT等,但国外产品对国内进行技术封锁且售价较高。国内相关产品还在研究阶段,邓巍等[10]利用植物和背景在可见/近红外光谱“红边”两侧反射率的差异,确定了探测绿色植物靶标的指数,并将判别阈值确定为5.54,实现了绿色植物靶标的快速探测。李林等[11]选取了595nm、710nm、755nm和950nm四个波长,并设计了一种能自动识别杂草的光谱传感器。王爱臣等[5]建立了基于荧光光谱信息的簇类独立软模式法(SIMCA)和线性判别分析(LDA)模型,绿色植物识别率达到92%以上。Wang等[1]优选了用于绿色植物检测的单波段光谱(中心波长为725nm,半峰全宽为50nm),实现了基于单波段光谱的绿色植物快速探测。
在植物靶标实际检测中,田间可能会存在一些绿色非植物的干扰,造成误检。另外,不同环境光照条件也会对检测结果造成较大影响。因此,本文拟研究不同环境光照下植物靶标的探测方法,同时对比研究不同光源照射的效果,以优选出合适的光源,为开发基于主动光源的绿色植物探测传感器提供理论依据。
1 材料与方法
1.1 样本准备
试验选取了27种样本,每种样本数量为5,共计135个样本。如图1所示,样本中包含8种常见蔬菜(菠菜、南苜蓿、苦菊、塔菜、豌豆苗、小白菜、油菜和油麦菜)、5种杂草(泥胡菜、救荒野豌豆、荠菜、小蓬草和白车轴草)、4种土壤、3种假叶、6种绿色非植物样本和1种枯叶样本。土壤样本A大部分是土壤,含有少量石子,是田间的常见土壤;土壤样本B的情况与土壤A基本相同,但土壤颗粒更大,含水率更高;土壤样本C只有一层浮土,大多数是大小不一的石子,这种土质在田间较少出现;土壤样本D是最具干扰性的,表面覆盖有青苔,其中的少量叶绿素可能会成为一个干扰项。假叶和6种非绿色植物样本是为了增加更多的绿色干扰样本,以使训练的模型可以区分绿色植物和绿色非植物,提高模型的适应性。为了区分绿色鲜活植物和枯败植物,还设置了枯叶样本。
1.2 光谱采集
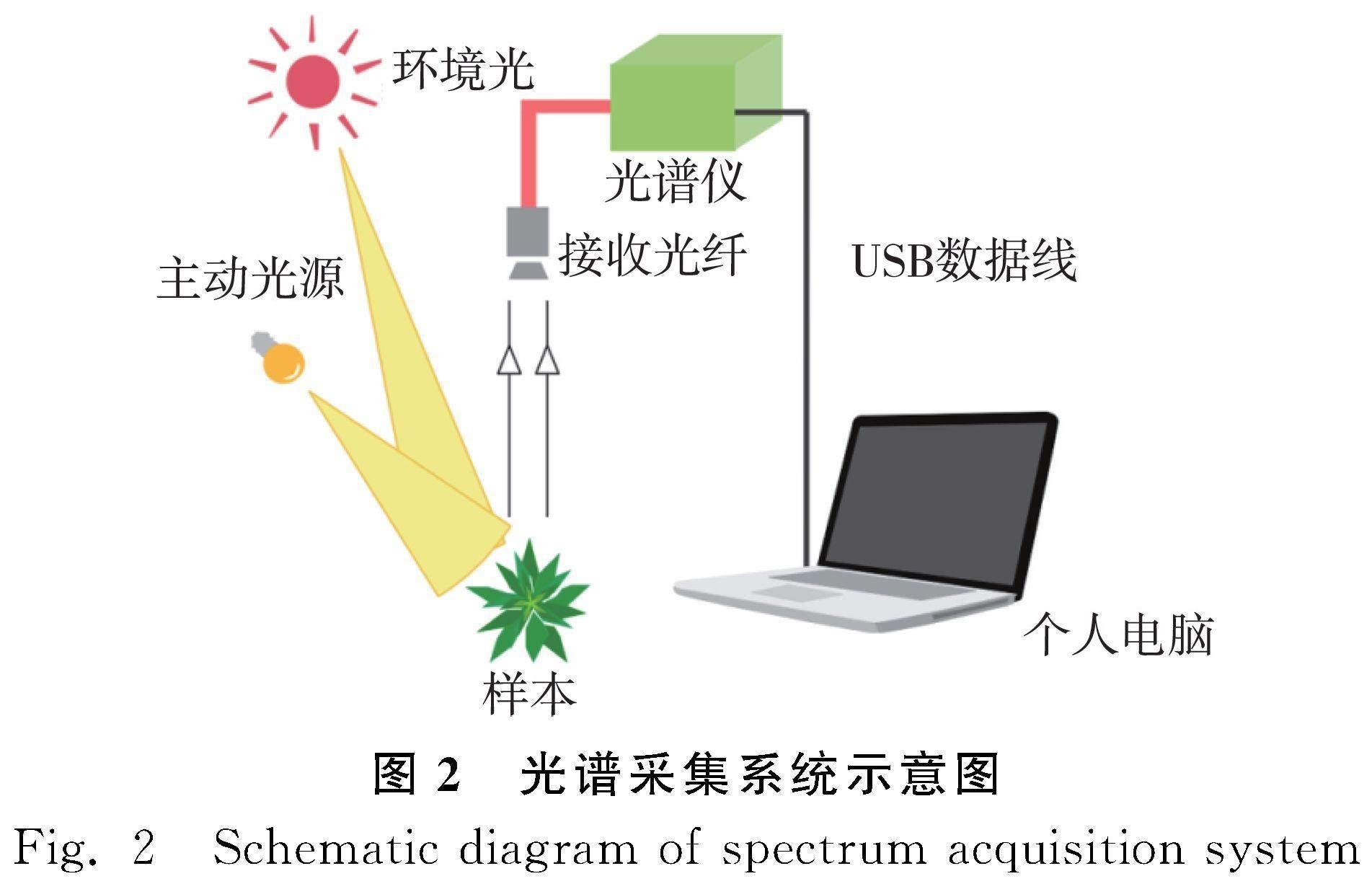
本文所用光谱信息采集系统示意图如图2所示。该系统由便携式光谱仪(USB2000+)、接收光纤(QP400-1-VIS-NIR)、主动光源、USB数据线和个人电脑组成。USB2000+光谱仪的光谱覆盖范围为340~1050nm,光谱分辨率为0.35nm,积分时间可在0.001~65s内设置。接收光纤直径为400μm,数值孔径为0.22。为优选主动光源,本文使用了三种主动光源,分别为红色LED、蓝色LED和卤钨灯。红色LED和蓝色LED光源为单波段光源,可以激发植物的叶绿素荧光。因此,在LED光源照射下采集的光谱信息主要为样本的荧光光谱信息,而卤钨灯照射下采集的光谱信息为可见/近红外波段的反射光谱信息。为研究环境光对绿色植物检测的影响,分别在室外阳光直射、室外阴影和室内黑暗环境下采集光谱信息。由于不同环境光、主动光源的强度不同,光谱仪所设置的积分时间也不同,具体积分时间设置如表1所示。
1.3 光谱预处理
考虑到光谱仪检测范围及信噪比,选取650~850nm波段进行进一步光谱数据分析。针对红色和蓝色LED照射下的光谱采集,因LED光源为单波段光源,无法采集参考光谱,因此将反射强度光谱作为数据进行分析;针对卤钨灯照射下的光谱采集,在采集样本光谱前分别采集了暗光谱和参考光谱,分别将反射强度和反射率光谱作为数据进行分析。反射率通过式(1)进行计算。
式中:
Reflectance——反射率光谱;
Intensity——反射强度光谱;
Reference——参考光谱;
Dark——暗光谱。
试验还对比了输入变量权重对分类模型准确度的影响,分别将权重值设置为常数1和变量标准差的倒数(1/SDev)。
1.4 分类模型建立与评价
在建立分类模型时,本文选用适于解决小样本、非线性、高维度数据分析的支持向量机(Support Vector Machine,SVM)。支持向量机是一种经典的监督学习方法,其根据训练样本集的数据分布特点,在训练样本空间中找到一个“超平面”可以区分不同类别的样本,并且该超平面对训练样本局部扰动具有最佳的“容忍度”,也就是使超平面距支持向量的距离最远,以达到较好的分类效果和模型鲁棒性[12]。核函数方面对比了线性核函数和径向基核函数(Radial Basis Function,RBF)。使用线性核函数时,经交叉验证试验将惩罚因子C确定为1。使用RBF核函数时有C和γ两个参数需要确定,经建立多个模型网格搜索后确定红色LED照射时C为2.001244,γ为0.03981072;蓝色LED照射时C为2.154435,γ为0.04;卤素灯照射时选择C为2.001244,γ为0.04。在建立分类模型时,将样本集按照3∶2的比例划分为训练集和测试集,验证方法选择“五折”交叉验证,即将训练集样本均分为5部分,在模型训练过程中每一部分轮流作为测试集评估模型精度,其他样本则作为训练集进行模型训练[13]。
本文通过精确度(Precision,P)、召回率(Recall,R)和F1-score评价模型的分类效果,其计算公式如式(2)~式(4)所示[14]。精确度P表示查准率,即预测为真的样本里确实为真的样本数量;召回率R表示查全率,即所有真样本中有多少被预测出来;F1-score为精确度和召回率的加权调和平均,综合考虑了查准率和查全率,是衡量分类模型综合性能的常用指标。
式中:
TP——真正例;
FP——假正例;
FN——假反例。
2 结果与讨论
2.1 光谱特征分析
不同环境下样本在不同光源照射下的反射光谱如图3所示。
红色LED和蓝色LED照射时,在LED光源的发射波长629nm和463nm附近因光源较强,存在反射强度饱和现象。考虑到这两个波长处光源强度较强,对植物判别意义不大,因此在建模判别模型时将这两处波长区域剔除。在三个反射强度光谱中,绿色植物在740nm附近有非常明显的反射峰,红色LED和蓝色LED照射下绿色植物在680nm附近也有较为明显的反射峰,而卤钨灯照射下绿色植物在680nm附近的反射峰则很微弱。这是因为较强的红光和蓝光激发出了绿色植物的叶绿素荧光[15],而卤钨灯为全波段光源,激发的叶绿素荧光较弱,且被部分淹没在了反射光谱中。在反射率光谱中,绿色植物在690~730nm波段存在着明显的红边[16]。室外场景下,反射光谱在688nm和764nm附近有明显的波谷,这是由于大气对太阳光的吸收而造成的夫琅禾费暗线[17]。在这两个波段处,可以提取出绿色植物在日光照射下微弱的叶绿素荧光。在三种光源照射下,所有绿色植物与绿色非植物样本在绿色波段(500~570nm)均有明显的反射波峰,这是因为这两类样本都反射绿色。因此,在此波段内难以区分绿色植物与绿色非植物样本。相比于绿色植物和绿色非植物,土壤和枯叶样本非常容易反射全波段的太阳光谱和卤钨灯光谱,而在黑暗环境下对LED照射没有明显的响应。
通过分析不同光源照射下不同样本的反射光谱特征可知,绿色植物样本与其他样本在光谱上最大的区别在于600~800nm之间的反射,这些不同主要是由于绿色植物的叶绿素导致。因此,本文后续将以600~850nm波段内的光谱为输入建立判别模型。另外,由于外界环境光的影响,其他类别的样本如土壤和枯叶,在600~850nm波段范围内和绿色植物仍然有光谱重叠区域,可能会对绿色植物检测带来一定的误差。
2.2 变量权重对模型精确度的影响
将输入变量权重分别设置为常数1和1/SDev时不同SVM分类模型的精确度,如表2和表3所示。可以看出,两种变量权重对线性核SVM模型的影响不大,所有线性核SVM模型的分类精确度都达到98%以上,但RBF核SVM模型在变量权重为1时出现了明显的过拟合现象,针对训练集的精确度高于99%,而测试集的精确度最低只有51.85%。变量权重为1时,卤钨灯反射率组的RBF核SVM模型的测试集精确度为97.53%,处于较高水平,这说明基于光谱强度的RBF核SVM模型受环境光影响较大,而卤钨灯反射率组通过参比光谱对反射强度进行了归一化,一定程度上解决了因外界光照不同导致的反射强度不同,达到了较好的分类效果。同样,将变量权重设置为1/SDev后,所有RBF核SVM模型精确度较为正常,这是因为设置变量权重为1/SDev也相当于对自变量值进行了归一化,减轻了因度量范围不同导致的误判别情况。因此,在后续建立分类模型时都将变量权重设置为1/SDev。
2.3 SVM模型分类结果
表4和表5分别为判别绿色植物与非绿色植物的线性核和RBF核SVM模型的分类结果。从表4可以看出,对于线性核SVM模型,所有模型的F1-score均超过99.00%,其中卤钨灯照射下两个样本组的精确度均达到了100.00%,说明所有识别为绿色植物的样本均为绿色植物;召回率为98.72%则说明该模型没有把所有绿色植物样本全部识别到,出现了少量遗漏情况。总的来说,不同主动光源对于线性核SVM模型的性能影响较小。如从对靶施药角度考虑,则召回率越高越好,即所有绿色植物样本都能被检测到,那么蓝色LED照射下的效果略好,F1-score也最高。
从表5可以看出,对于RBF核SVM模型,不同样本组下模型性能出现了一定差异。其中总体表现最好的仍为蓝色LED照射下的,其测试集召回率达到100.00%,即所有绿色植物样本都能被检测到,训练集和测试集F1-score分别为99.59%和99.17%,和线性核SVM模型性能相当。其他三个样本组模型都出现了轻微的过拟合现象,即测试集结果略低于训练集结果,这可能是由于光谱噪声较大、输入变量数较多而样本数相对较少导致。因此,从主动光源的角度来看,蓝色LED光源的综合效果最好;从SVM模型核函数角度,蓝色LED样本组模型使用线性核和RBF核基本无差别,而其他样本组则线性核效果较好。
3 结论
本文针对精准农业中靶变量施药时对植物靶标探测的实际需求,研究了红色LED、蓝色LED和卤钨灯照射下基于光谱信息和支持向量机的绿色植物检测方法。
1) 在室外阳光直射、室外阴影和室内黑暗环境下采集了三种光源照射下绿色植物和非绿色植物共27种样本的反射光谱,并对光谱进行了预处理用于后续建模分析。
2) 研究了常数1和标准差倒数1/SDev两种变量权重对支持向量机SVM模型精确度的影响,结果表明两种变量权重对线性核SVM模型的影响不大,但径向基函数RBF核模型在变量权重为1时效果较差,最低精确度只有51.85%,变量权重为1/SDev时所有RBF核SVM模型精确度较为正常,最低精确度为95.06%。
3) 对比了红色LED、蓝色LED和卤素灯照射下变量权重为1/SDev的绿色植物检测SVM模型。结果表明,三种光源对于线性核SVM模型的性能影响较小,所有线性核SVM模型的F1-score均超过99.00%,其中卤钨灯照射下建立的SVM模型精确度达到了100.00%,蓝色LED照射下建立的SVM模型F1-score最高,达到99.79%;RBF核SVM模型中效果最好的为蓝色LED照射下建立的模型,训练集和测试集F1-score分别为99.59%和99.17%。本研究结果可为开发基于主动光源的绿色植物探测传感器提供理论依据。
参 考 文 献
[1] Wang A, Li W, Men X, et al. Vegetation detection based on spectral information and development of a low-cost vegetation sensor for selective spraying [J]. Pest Management Science, 2022, 78(6): 2467-2476.
[2] 冯雷, 高吉兴, 何勇, 等. 波谱成像技术在作物病害信息早期检测中的研究进展[J]. 农业机械学报, 2013, 44(9): 169-176.
Feng Lei, Gao Jixing, He Yong, et al.Research development of spectral imaging technology in early detection of botanical diseases [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(9): 169-176.
[3] Hamuda E, Glavin M, Jones E. A survey of image processing techniques for plant extraction and segmentation in the field [J]. Computers and Electronics in Agriculture, 2016, 125: 184-199.
[4] Lee W S, Alchanatis V, Yang C, et al. Sensing technologies for precision specialty crop production [J]. Computers and Electronics in Agriculture, 2010, 74(1): 2-33.
[5] 王爱臣, 高斌洁, 赵春江, 等. 基于荧光光谱信息的绿色植物探测研究[J]. 光谱学与光谱分析, 2022, 42(3): 788-794.
Wang Aicheng, Gao Binjie, Zhao Chunjiang, et al. Detecting green plants based on fluorescence spectroscopy [J]. Spectroscopy and Spectral Analysis, 2022, 42(3): 788-794.
[6] Sun H, Li M, Qin Z. Detection system of smart sprayers: status, challenges, and perspectives [J]. International Journal of Agricultural & Biological Engineering, 2012, 5(3): 10-23.
[7] Wang W. A review on weed detection using ground-based machine vision and image processing techniques [J]. Computers and Electronics in Agriculture, 2019, 158: 226-240.
[8] 毛文华, 张银桥, 王辉, 等. 杂草信息实时获取技术与设备研究进展[J]. 农业机械学报, 2013, 44(1): 190-195.
Mao Wenhua, Zhang Yinqiao, Wang Hui, et al. Advance techniques and equipments for real-time weed detection [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(1): 190-195.
[9] Saric R, Nguyen V D, et al. Applications of hyperspectral imaging in plant phenotyping [J]. Trends in Plant Science, 2022, 27(3): 301-315.
[10] 邓巍, 赵春江, 何雄奎, 等. 绿色植物靶标的光谱探测研究[J]. 光谱学与光谱分析, 2010, 30(8): 2179-2183.
Deng Wei, Zhao Chunjiang, He Xiongkui, et al. Study on spectral detection of green plant target [J]. Spectroscopy and Spectral Analysis, 2010, 30(8): 2179-2183.
[11] 李林, 魏新华, 毛罕平, 等. 冬油菜田杂草探测光谱传感器设计与应用[J]. 农业工程学报, 2017, 33(18): 127-133.
Li Lin, Wei Xinhua, Mao Hanping, et al. Design and application of spectrum sensor for weed detection used in winter rape field [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(18): 127-133.
[12] Li J, Sun L, Li R. Nondestructive detection of frying times for soybean oil by NIR-spectroscopy technology with Adaboost-SVM (RBF)[J]. Journal for Light and Electronoptic, 2020, 206: 164248.
[13] Swami A, Jain R. Scikit-learn: Machine learning in Python [J]. Journal of Machine Learning Research, 2013, 12(10): 2825-2830.
[14] Goutte C, Gaussier E. A probabilistic interpretation of precision, recall and F-score, with implication for evaluation [M]. World Publishing Corporation, 2005.
[15] Murchie E H, Lawson T. Chlorophyll fluorescence analysis: A guide to good practice and understanding some new applications [J]. Journal of Experimental Botany, 2013, 64(13): 3983-3998.
[16] 冯海宽, 陶惠林, 赵钰, 等. 利用无人机高光谱估算冬小麦叶绿素含量[J]. 光谱学与光谱分析, 2022, 42(11): 3575-3580.
Feng Haikuan, Tao Huilin, Zhao Yu, et al. Estimation of chlorophyll content in winter wheat based on UAV hyperspectral [J]. Spectroscopy and Spectral Analysis, 2022, 42(11): 3575-3580.
[17] Cogliati S, Verhoef W, Kraft S, et al. Retrieval of sun-induced fluorescence using advanced spectral fitting methods [J]. Remote Sensing of Environment, 2015, 169: 344-357.