高精度数字稳定平台控制系统设计与实现
2014-12-10李绍军
雷 杨,李 军,吴 晨,李绍军
(南京理工大学 自动化学院,江苏 南京 210094)
0 引言
陀螺稳定平台作为稳定视轴或瞄准线的主要手段[1],一直是国内外科研机构的主要研究对象。陀螺稳定平台主要作用是消除平台受到的干扰,使平台能够按照既定的方向运动或者在惯性空间中保持稳定,保证平台负载能够精确、稳定地跟踪目标[2]。
稳定平台控制系统实现数字化,能克服以模拟电路实现为主的控制系统中体积大、成本高、故障频繁、很难将控制精度提高到1%以上的级别、漂移误差影响等缺陷。鉴于国内大部分稳定控制系统的控制芯片为定点型芯片,其浮点运算能力有限,参考文献[3]设计伺服跟踪控制器以定点DSP芯片为核心、FPGA为辅助处理器的控制结构。而本设计以浮点型DSP芯片为主控芯片,提高数据处理速度和计算精度,使实现电流环、速度环、位置环多闭环复合控制成为可能。
1 稳定平台系统结构及原理
稳定平台结构设计常采用双轴或三轴框架式结构,不同方向轴结构类似,均由负载、执行器、测量元件、功率放大器组成。为满足各项技术指标,实现高的稳定和跟踪精度,不仅需要精心设计机械结构和合理选择各类元器件,而且需要设计可靠的控制方案。本设计采用电流环、速度环、位置环组合的多闭环复合控制方案。
稳定平台装置控制框图如图1所示,稳定平台装置控制分为两种模式:系统静止状态下的伺服控制和系统运动状态下的稳定控制。其中载体静止时系统工作于伺服控制模式,系统的作用是使稳定平台转角相对基座保持固定不变或跟随指令信号进行跟踪运动,采用旋转变压器作为角度反馈器件;载体运动时系统工作于稳定控制模式,控制系统主要功能是隔离载体运动及平台受到的各种扰动信号,保持平台相对于惯性空间稳定,以保证光电装置可以获得稳定的视场,采用陀螺仪作为平台速度反馈器件。
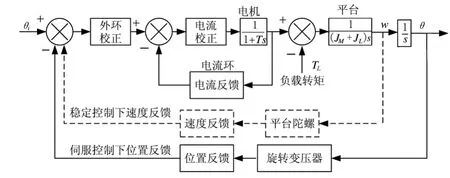
图1 稳定平台装置控制框图
2 控制系统硬件设计实现
该稳定平台控制系统分为方位轴和俯仰轴两个自由度的运动控制,控制系统在这两个方向上硬件结构基本一致,方位控制板硬件结构示意图如图2所示,主要可以分为信号采集、电机驱动和信息交互三部分。
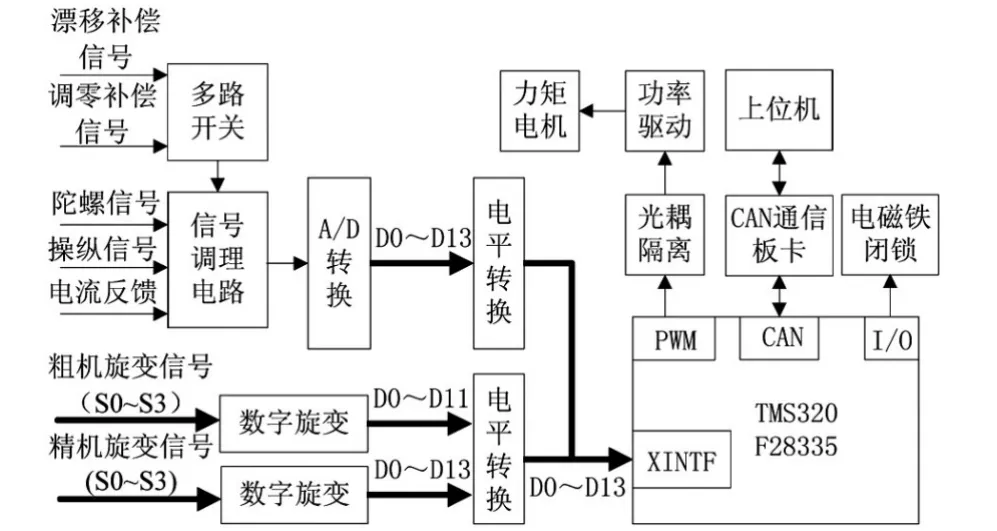
图2 控制系统硬件组成框图
稳定平台系统的控制过程:采样电阻采集力矩电机电流大小传送给DSP主控制器,同时陀螺敏感到平台在惯性空间的角速度信号,经过A/D转换后变为数字信号传送给DSP主控制器,并且旋转变压器感应到的平台位置信号经过轴角粗精通道编码后,也传送到DSP主控制器,在DSP主控制器中经过信号处理和多闭环组合控制算法处理后,产生控制力矩电机的信号,以抵消扰动力矩使平台稳定并跟踪目标。
2.1 检测元件的选择
2.1.1 角度测量元件选择
由于系统使用环境存在大冲击等恶劣因素,电机角度采样装置除了需要能精确地反映电机真实的转角外,还需要有较强的抗冲击和抗误差能力。旋转变压器是在测角系统中广泛采用的一种高精度角度传感器,其精度高,动态性能好,抗干扰能力强,尤其适用于高温、严寒、潮湿、高速、振动等环境恶劣、旋转编码器无法正常工作的场合。由于粗机测量范围大但精度低,精机测量范围小但精度高,在测量电机角度时一般都采用粗精组合的方式获取准确角度。本系统设计根据要求可以将粗精通道数据组合成测量范围为180°的16位整型数据,即测量精度可达到0.047 9 mrad。
2.1.2 速度敏感元件选择
动力调谐陀螺仪与常用的输出位置信号的液浮陀螺不同,该陀螺输出的是速率信号。光纤陀螺输出为速率信号,但其对供电电源要求很苛刻,而且信号输出范围大,频率高,易受干扰[4]。经过调研,动力调谐陀螺仪是目前国内同等体积下精度较高的一款陀螺仪。动力调谐陀螺仪是一种双自由度陀螺仪,它利用可以准确补偿摩擦力矩的挠性支承悬挂陀螺转子,消除了摩擦干扰力矩,结构简单,性能可靠。
2.2 电流反馈模块分析与设计
电流环控制电机电枢电流同时使电枢电流严格跟踪控制电压指令的变化,从而准确控制电机输出力矩[5]。电流环作为控制系统内环提高系统响应速度和精度,实际系统中还可以提高系统静态力矩刚度。在实际系统中PWM电压输出与电机电流输出并非线性关系,其比值在低电流段较大,随着电流增加而减小,故增加电流环可以提高控制输出与电机输出力矩线性度,优化系统控制特性。同时电流环能够削弱电机在低速运行时出现的“爬行”现象和换向时的“平顶”情况。电流采样的硬件电路如图3所示,通过电阻采样、电压信号差分放大、低通滤波、A/D采样实现,低通滤波采用二阶Butterworth滤波电路。A/D采样采用快速、低功耗的14位A/D转换芯片 AD7899。
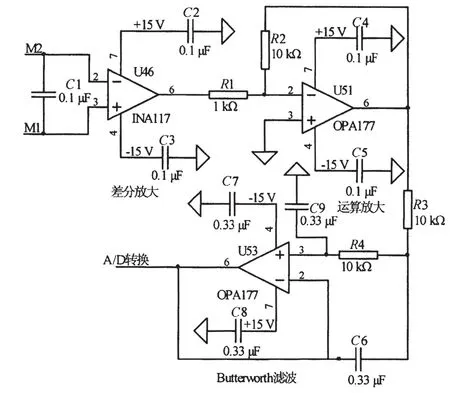
图3 电流反馈电路图
2.3 电机驱动模块
电机功率驱动模块由专门的24 V电源供电,由于电机驱动工作于高频、大电流状态,对控制电路容易产生信号干扰,需将控制信号与电机驱动信号可靠隔离,防止高频干扰。DSP控制芯片输出的两路PWM驱动信号经过光耦HCPL2601隔离后送至集成驱动器MC33486用以驱动电机,MC33486的控制信号以及反馈信号也通过光耦进行隔离。由7805构成的电压转换电路给光耦位于电机侧信号提供单独的+5 V电源。
3 陀螺信号处理
3.1 调零调漂补偿电路
本系统所选陀螺仪的标度因数为8.5μV/℃,对应10Ω采样电阻的标度因数就为 65.3 mV/°/s,但陀螺仪在检测速度为零时输出存在零位偏差。除元器件本身随着温度、时间会产生信号漂移以外,由于地球自转,当陀螺指向不同时,其自身输出信号漂移量也有所变化,由此设计调零调漂补偿电路,补偿陀螺信号零位偏差和漂移影响。其电路图如图4所示,调零补偿电路与调漂补差电路相同,故图中省略调漂补偿电路。该系统使用两个不同电阻值分辨率的旋钮式滑动变阻器实现0~5 V电压的粗、精补偿。利用稳压芯片BS0505S-2W隔离系统电压波动对输出补偿信号的影响。陀螺速率信号的漂移补偿和零偏补偿电路使用多路开关来分时选通,并经过同一个A/D转换器转换为数字量进行补偿。
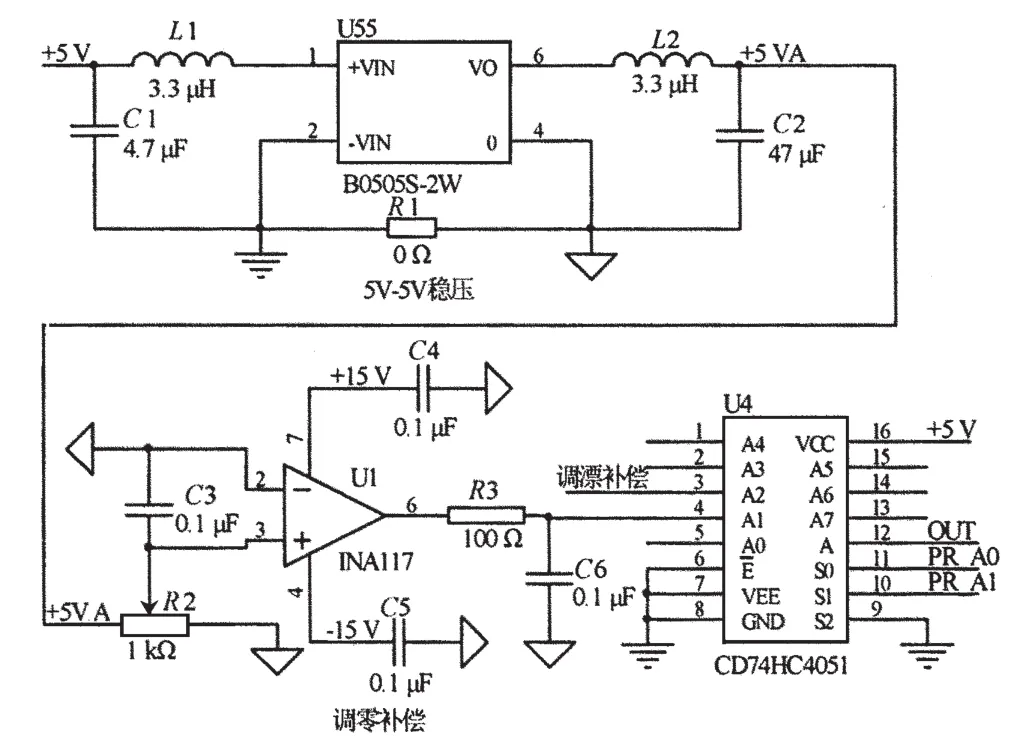
图4 调零调漂补偿电路
3.2 信号调理电路
为了提取有用的信号,保证稳定环路的输出精度,必须对陀螺输出信号进行滤波预处理[6]。处理电路如图5所示,利用差分放大电路抑制共模信号的特性进行减噪处理。运算放大器INA117的偏置电压为25μV且其温漂典型值只有8.5μV/℃,该温漂值与常用的运算放大器相比并不小,但是此处主要是利用其搭建差分放大电路来抑制共模信号,而且其内部集成典型放大电路,可以省去外接电阻,简化电路。由于陀螺受随机干扰力矩及不确定因素影响,输出信号含有很多高频干扰信号,常用的无源RC低通滤波器能够达到一定的滤波效果。本系统所要求的陀螺仪带宽需要≥60 Hz,并不是无限宽的,为了避免高频振动时低通滤波器造成陀螺信号失真同时兼顾对陀螺信号的滤波效果,需要合理地选取电阻值和电容值。为了隔离前后级间的影响,运算放大电路中一般都接一个电压跟随器,这里选用OP177运算放大器来构成电压跟随器,相比较常用的LM158,其最大的优点是温漂非常小,典型值只有0.1μV/℃。对于具有陀螺随机漂移信号的系统,选用低温漂的器件是必要的。
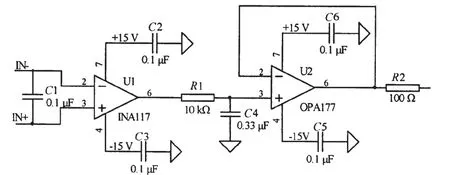
图5 信号调理电路
3.3 数字滤波处理
经过信号调理电路、A/D转换后的陀螺采样信号波动范围仍达到±3 mV,利用此信号作为陀螺反馈信号控制力矩电机,系统隔离精度达不到设计要求。滑动平均滤波器计算时所需的内存空间少,运算时间短。它实质上是一个低通滤波器,在平滑信号、滤除高频分量方面有显著的作用。
滑动平均滤波的原理:将长度固定为M的连续采样数据队列,在每次新的测量之后,去掉队列的第一个数据,剩下的M-1个数据依次向前移动,在队尾插入新的采样数据,然后对此队列作算数运算,其结果记为本次测量结果。M项滑动平均滤波器的表达式为:

该系统中对陀螺信号的采样时间间隔为 100μs,即采样频率fs=10 kHz。陀螺仪的带宽为≥60 Hz。取M=100,每次用100个最新的采样数据对其求算数平均。得到的结果如图6所示。
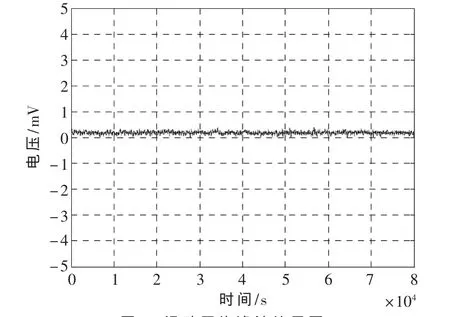
图6 滑动平均滤波效果图
4 控制系统软件设计实现
4.1 主程序设计
系统中用到了DSP芯片的多个模块,在系统正常工作前需对其进行初始化。首先关闭所有中断,对系统初始化,然后对用到的模块进行初始化,再设置中断向量表,完成这些工作后打开中断,等待中断。中断程序是用来处理信号采集、控制算法计算等工作。
4.2 中断程序设计
整个系统的运行主要依赖于中断程序的运行,中断程序的设计直接关系到系统的信号采集、算法计算以及控制执行。因此,中断程序的设计是整个软件设计的核心。
由于电流采样信号和陀螺信号的精度对系统影响非常重要,因此对于电流采样和陀螺信号的采集频率要求很高。这就要求定时中断的间隔时间尽可能短。又由于信号采样、信号处理、控制计算都要在中断程序内完成,在中断的间隔时间内必须保证能完成这些工作。因此在综合考虑了这两个因素后,将定时中断的时间定为100 μs。
电流采样和陀螺采样需要在每次中断执行中都完成一次,而旋转变压器的采样则不用这么频繁,控制算法的执行频率也不用这么高。因此在定时中断程序内定义一个计数器CNT,将中断任务分为7次一组,CNT在不同的值时对应不同的任务。具体安排如表1所示。
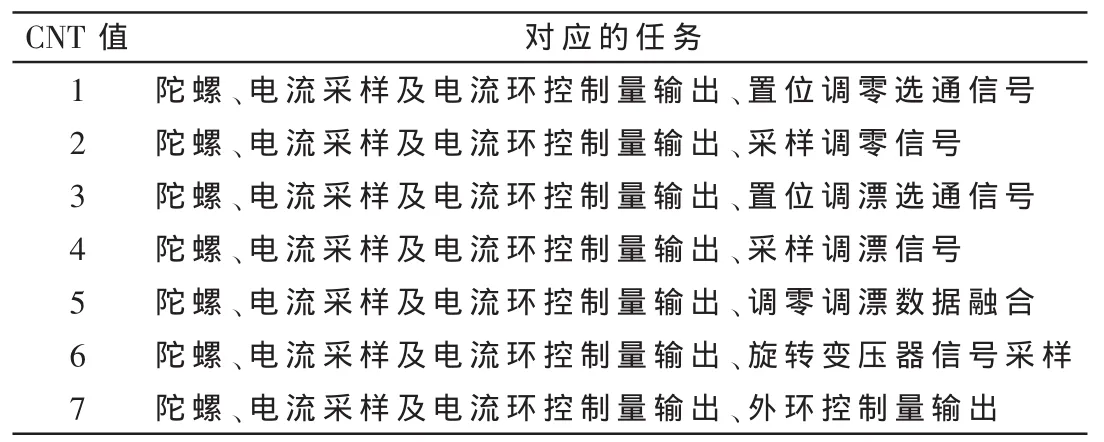
表1 中断任务分配表
5 系统性能测试
当系统处于静止状态下的伺服控制时,跟踪指令使光电装置在水平方向上0°跟踪到 22.5°,跟踪曲线如图7所示,跟踪过程运动平稳,且最后稳定在22.5°位置,稳定误差在±0.047 9 mrad范围内。当系统处于运动状态下稳定控制时,如图8所示,在7.2 s处给系统基座水平方向加入最大幅值约为3°/s的扰动,系统能够很好地隔离扰动速度的影响,保持位于俯仰环的视轴稳定。在没有给定操纵速度时,基座在水平方向扰动下,光电装置水平方向保持在±0.25 mrad范围内,垂直方向保持在±0.05 mrad范围内。扰动速度撤去后能够迅速回到零位且保持稳定状态,总体稳定性良好,能有效隔离载体扰动。
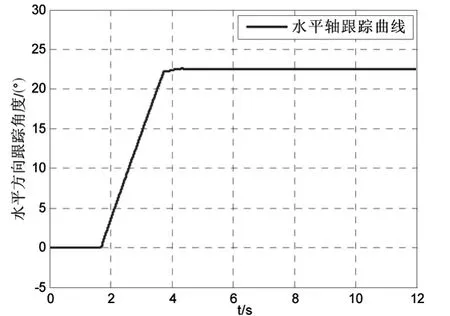
图7 水平轴跟踪曲线图
6 结论
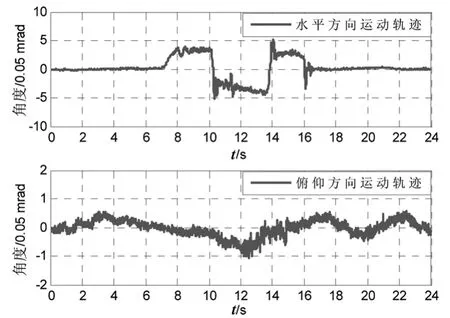
图8 光电装置受扰动运动轨迹
本文介绍了一种高精度数字稳定平台控制系统的设计与实现。电流环设计在伺服控制系统设计中比较常见,而且实现方法多种多样,本文基于采样电阻的电流采样方法简单易实现,使系统稳定度和控制精度有明显提高。采集的陀螺信号经过调零调漂补偿电路、低通滤波电路及数字滤波处理,能够准确反映陀螺角速率变化,使力矩电机能够有效抵消扰动力矩。实验测试结果表明,此稳定平台系统能够精确、稳定地跟踪目标并能有效地隔离载体扰动。
[1]杨蒲,李奇.陀螺稳定平台自适应分层滑模速度控制[J].兵工学报,2008,29(7):864-869.
[2]Zhang Hua,Ke Xizheng,Jiao Rong.Experimental research on feedback Kalman model of MEMS gyroscope[C].The 8th International Conference on Electronic Measurement and Instruments,2007(1):253-256.
[3]代根学,刘朝晖,刘军.基于DSP与 FPGA的跟踪伺服运动控制器设计[J].电子技术应用,2010,36(1):64-70.
[4]米月星,林辉.光纤陀螺在稳定平台伺服系统中的应用[J].电子技术应用,2012,38(9):58-60.
[5]庞新良.机载光电稳定平台数字控制关键技术研究[D].湖南:国防科学技术大学,2007.
[6]杨蒲,李奇.三轴陀螺稳定平台控制系统设计与实现[J].中国惯性技术学报,2007,15(2):171-176.
[7]王德江,张涛.陀螺去噪算法对航空相机像移补偿系统的影响[J].红外与激光工程,2010,39(5):967-971,978.
