多模式GNSS接收机的数字AGC电路设计
2014-12-10胡伟迪何文涛李晓江
胡伟迪 ,何文涛 ,李晓江
(1.中国科学院 工程管理与信息技术学院,北京 100049;2.中国科学院微电子研究所,北京 100029)
0 引言
低功耗、小体积便携导航设备是当今导航接收机发展的主流趋势。在导航GNSS(Global Navigation Satellite System)接收机中,卫星信号经大气环境的衰减,实际经天线接收到的信号功率远小于系统噪声功率,而且由于环境变化和干扰的影响,接收到的信号会在很大的动态范围内变化,对精度和幅度范围均有限的模数转换器ADC(Analog-Digital Converter)来说,直接对接收信号进行模数转换会造成很大的信号损失。普遍做法是增加一个自动增益控制电路AGC(Automatic Gain Control),自适应调节信号功率,使ADC输入的信号处于ADC的动态范围内同时尽量减小信号损失。AGC的性能很大程度上影响着模数转换后的信号的稳定性和抗干扰能力以及卫星信号的定位跟踪。
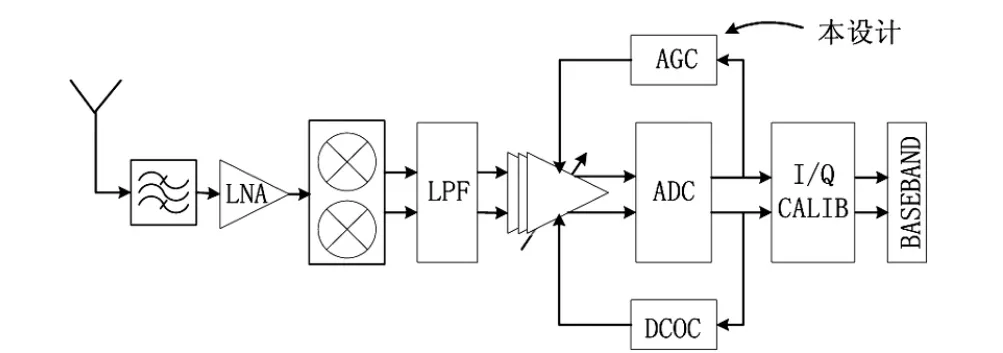
图1 多模式GNSS接收机结构框图
图1为本文采用的多模式GNSS接收机结构。天线接收的信号经声表面滤波器保留有用卫星信号频带,经低噪放大器放大、正交下变频和低通滤波产生I/Q两路中频信号,模数转换后送入数字基带。ADC环路由可变增益放大器 PGA(Programmable Gain Amplifier)、ADC、AGC 和直流偏移校正电路DCOC(Direct-Current Offset Calibration)组成。PGA有两个控制电路:DCOC和AGC。DCOC控制PGA的直流偏置点,以消除信号中的直流成分;AGC控制信号的增益,以满足ADC的动态范围和信噪比需求。
[1]提出的I/Q两路独立进行增益调节的控制方式实现增益步阶误差小于0.06 dB,但由于其采用固定的更新周期和增益步长,信号的动态范围较大时不能实现快速调节。参考文献[2]提出的自动增益控制算法利用2 bit ADC的幅度位进行功率统计,增益控制由加/减计数器完成,从其算法也易看出,其增益调节的速度较差,建立时间相对较长,不能满足增益快速收敛的需求。
本文提出一种三级自动增益控制方法及电路实现。I/Q两路共享一个AGC电路,增益控制过程仅用到I/Q路ADC输出数字信号的1 bit数据,采用三级增益步阶算法自适应地调整增益步阶,达到快速且稳定的增益收敛。仿真表明,此AGC电路具有很好的稳定性能和抗带内连续波干扰性能。
1 结构描述
本文提出自动增益控制方案如图2所示。数字AGC环路由PGA、ADC和AGC三部分组成。I/Q两路的PGA共享同一增益控制信号,可由AGC产生,也可由软件通过SPI接口配置;ADC采用 Flash结构,满足高速转换需求。AGC电路对ADC输出信号进行实时监测统计,得到PGA的控制信号对输入I/Q路信号进行增益控制,输出经放大后的模拟信号,模数转换后得到数字输出。
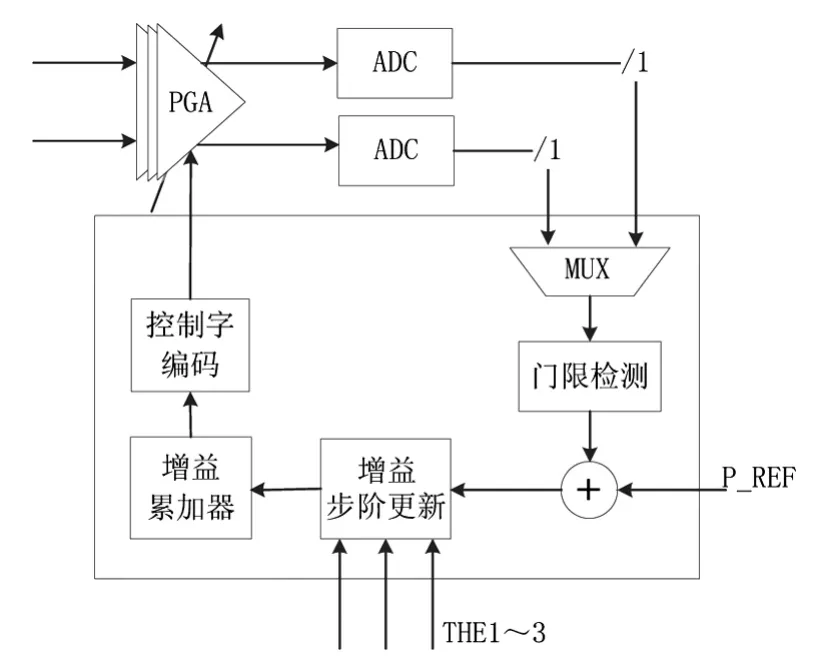
图2 数字AGC环路结构图
2 PGA电路结构
PGA的功能是对输入信号的功率进行调节,主要性能指标有增益范围、频率响应等。图3为本文的PGA结构。PGA本质上是一个无限多路反馈滤波器,其传输函数为:

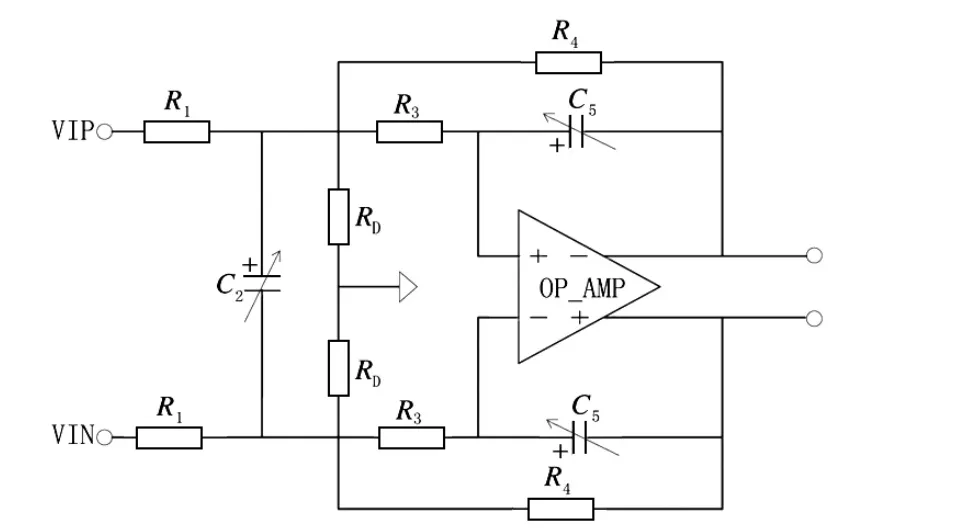
图3 PGA结构原理图
中频响应函数为:

图 3中,R4为固定电阻。由中频响应可知,R1决定增益范围,减小R1将增大增益,反之减小增益。RD的作用是稳定频率参数,由PGA的传输函数容易得出其极点分布。分析其极点分布易知,若不存在RD,则R1变小使得增益变大的同时也会减小频率带宽,使频率性能变差,增加RD作为频率补偿电阻与R1联动调节,使得R1变化时稳定频率带宽。PGA增益调节的范围和精度主要由R1和RD的取值决定,因此需要仔细设计R1和RD的取值范围和离散区间以满足设计需求。
3 AGC原理与实现
AGC的主要原理是通过实时监测信号功率来控制输入信号幅度以满足ADC的量化要求和性能需求[3]。由于接收到的GNSS信号功率远小于系统噪声功率,而环境中的人为干扰或其他频段信号(如WCDMA、GSM等宽带信号)的功率通常远大于GNSS信号功率,实际上检测到的是系统噪声或干扰和信号的总功率。理论表明[4],在仅有白噪声的情况下,最优的ADC最大阈值L与白噪声标准差的关系为≈1,而有带内连续波干扰存在时,最优值为1.1~1.4。参考此理论指标,本文提出一种快速稳定收敛的三级自动增益控制算法与实现。
图2中给出了为本文提出的数字AGC电路的结构图。本设计电路由多路选择器MUX、门限检测器、门限比较器、增益步阶更新电路、增益累加器、控制字编码器等部分组成。MUX用以选择I/Q路任一路ADC输出采样数据的最高幅度位作为输入;门限检测器在时间窗口内检测信号的门限值;检测值与参考门限比较得到差值;差值送入增益步阶更新电路与三级比较阈值THRE1~3比较以更新增益步阶;增益累加器对增益步阶累加更新当前增益控制字;控制字编码器对增益控制字编码以适应PGA的控制字格式。时间窗口、参考门限和三级比较阈值均可由软件配置。
3.1 门限检测电路
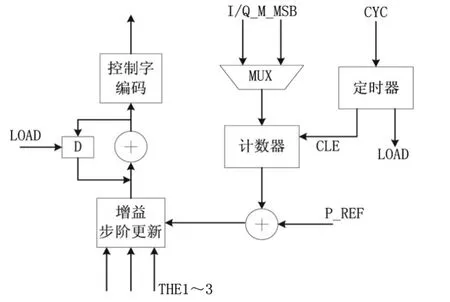
图4 数字AGC电路结构图
图4为具体的电路结构。其中门限检测电路由计数器和定时器两个电路组成。定时器根据时间窗口值CYC产生更新信号LOAD和计数器控制信号CLE。计数器在CYC内检测信号的实际门限值,即数据为“1”的个数比率。CLE有效时,计数器输出当前检测值并置0重新开始计数。LOAD控制定时器的重载并作为增益累加器的使能信号。LOAD有效时,增益累加器对输入数值进行一次累加并锁存到寄存器中。各参数的配置值也是在LOAD有效时或初始化时被相关电路锁存。
上述门限检测电路输出检测值的数学表达式为:

其中 N 为时间窗口,i(n)∈[0,1]。
3.2 增益步阶更新电路
增益步阶更新电路产生增益步阶,实现三级可变增益步阶算法,算法主要思想是通过比较门限检测电路得到的检测值与参考门限的相对大小而设置不同的增益步阶,检测值与参考门限相差越大,增益步阶绝对值越大,以达到增益的快速稳定收敛。增益步阶的数学表示为:

其中Pref为最优参考门限,Pcal即为检测得到的门限值,Coef x为第 x级(x=1,2,3)增益步阶系数。具体算法流程如图5所示。

图5 三级增益控制算法流程图
首先,在AGC电路开始工作之前配置时间窗口、参考门限、第1~3阈值5个参数,也可以在工作中改变配置,但新的配置值要等当前更新周期完成之后才被锁存。时间窗口为每个更新周期的采样点数;参考门限为理想情况下的信号最优高电平比率;第1~3阈值取值依次从大到小,分别对应于检测值距离参考门限的相对大小。增益系数选择流程可分为以下4步:
(1)对统计结果与参考阈值的差值取绝对值。
(2)将此绝对值与第一阈值比较,若大于第一阈值,则增益步阶系数选择最大步阶系数1输出,流程结束;否则转入步骤(3)。
(3)若绝对值在第一阈值与第二阈值之间,则增益步阶系数选择较大步阶系数2输出,流程结束;否则转入步骤(4)。
(4)若绝对值在第二阈值与第三阈值之间,则增益步阶系数选择最小步阶系数3输出,流程结束;否则增益调节达到稳定,增益步阶为0,流程结束。
4 仿真结果与分析
AGC的性能极大程度影响着量化后的信号性能,本文中给出输入信号功率变化时AGC的调节灵敏度和稳定度以及存在带内连续波干扰时的性能。表1为仿真参数。
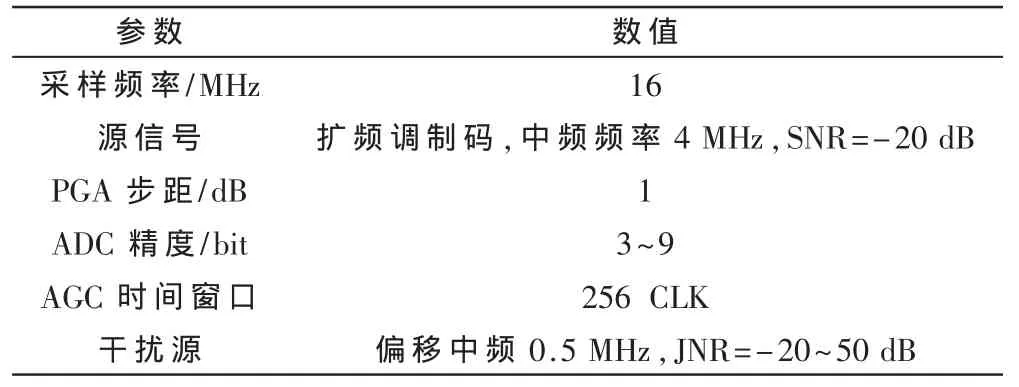
表1 仿真参数
图6为信号功率变化时的增益调节过程。最上面的波形为源信号,中间的波形为经PGA后的输出信号,最下面的波形为增益的变化过程。仿真可以看出,当信号很小或很大时在增益调整的初期可以达到5 dB的增益步阶,信号功率越接近理想功率,增益步阶越小,直至稳定,增益收敛快速,在给定仿真参数下信号可以在70 ns内达到14 dB范围的变化。图中也可以看出,稳定时增益可以在很长时间内保持不变,稳态性能很好。
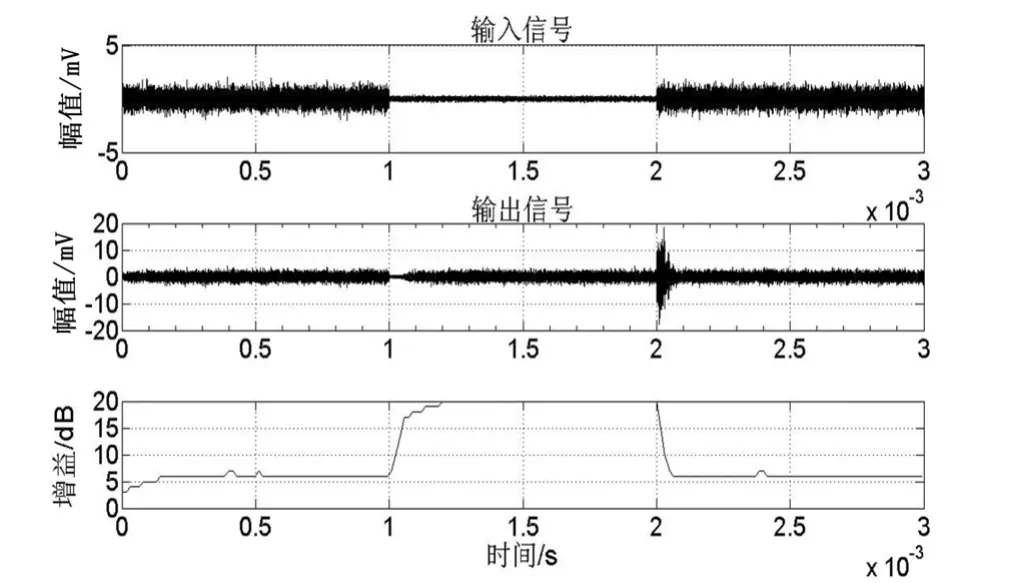
图6 MATLAB仿真结果
图7为不同量化精度下信号的信噪比损失[5]随带内连续波干扰的功率变化的仿真结果。图中标出了输出信噪比的1 dB和3 dB损失点。容易看出,其抗干扰的能力随着量化比特数增加而增强。干扰信号增加到一定程度时信噪比损失剧烈增加,其主要原因是由于有限的量化位宽引入杂散频率,仿真所得的电路抗干性能与理想性能[6]吻合,且量化精度越高,性能越接近理想性能。
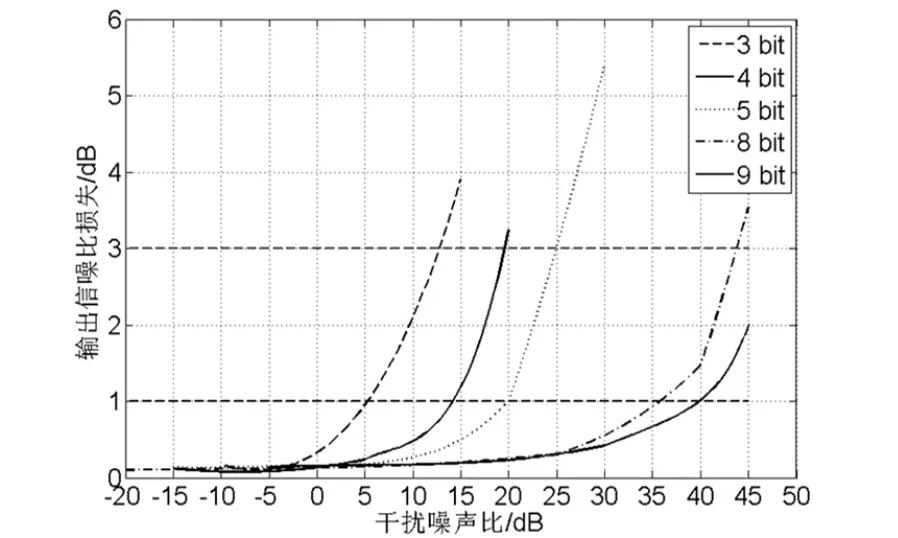
图7 不同量化精度时输出信噪比随着干扰噪声比的变化
本文基于SMIC的55 nm SS工艺库,用Synopsys的Design Compiler工具对AGC电路进行综合,AGC工作时钟设为100 MHz,综合后电路总面积为 1 379.3μm2,约合985个逻辑门,时序余量为2.54 ns。
5 结束语
本文设计了一款应用于多模式GNSS接收机的数字自动增益控制电路AGC。AGC的三级自动增益控制算法提高了增益调节的灵敏度和稳定度。仿真表明,在接收到的信号功率发生变化时,增益能够快速收敛达到稳定。同时通过仿真得到对不同干扰强度情况下ADC的输出信噪比损失,ADC的量化精度越高,仿真性能越接近理想性能。本设计电路结构简单,可移植性强,适用于2 bit及以上的ADC的增益控制。
参考文献
[1]Xie Jun,Chi Baoyong,Xu Yang,et al.A low power 45 dB DR all-digital assisted AGC loop for a GNSS receiver in 0.18 um CMOS[C].IEEE International Conference on ICSICT,2012:1-3.
[2]Zhou Mingxing,Fan Chaojie,Chen Dongpo,et al.A compact automatic gain control loop for GNSS RF receiver[C].IEEE International Conference on ICSICT,2010:284-286.
[3]谢刚.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[4]BALAEI A T,DEMPSTER A G,AKOS D.Quantization degradation of GNSS signal quality in the presence of CW RFI[C].IEEE International Symposium on Spread Spectrum Techniques and Applications,2008:42-47.
[5]何文涛,徐建华,叶甜春.GPS弱信号的自适应载噪比估计算法[J].电子技术应用,2010,36(6):111-114.
[6]SCHULTZ C,HAMMES M,KREIENKAMP R,et al.Interferer performance dependency on analog-digital-conversion of GNSS-class signals in GPS receivers[C].IEEE International Conference on ICECS,2010:675-678.
