基于无线传感器网络的室内停车场定位系统研究
2014-12-09黄勇,徐耀,曾刚,王波,黄林
黄 勇,徐 耀,曾 刚,王 波,黄 林
(湖北民族学院 信息工程学院,湖北 恩施445000)
经济的高速发展,使更多的公民拥有了私家车,这就造成了交通的拥堵,也使得人们在许多室内停车场难以方便取得车辆.因此急需在大型室内停车场中装备相应的定位系统,于是本系统的研究具有很大的实用性.
现有主要测距算法RSSI、TOA、TDOA 等均存在各自的误差,给准确定位造成了一定困难,难以高效用于室内停车场内车辆的定位.综合RSSI、TOA、TDOA 算法应用在不同领域的各自特点.本系统采用RSSI 算法来实现停车场的测距,并通过高斯模型优化测距算法,然后利用准确的测距数据,再使用三边定位算法实现定位.
1 硬件部分
本系统以Zigbee 技术和CC2530 为硬件支撑.CC2530 是德州仪器推出的用于2.4GIEEE802.15.4/Zigbee 的片上系统解决方案.CC2530 采用2.4GHz 频率作为射频收发器,该频段特性符合IEEE802.15.4标准,收发功能良好,并由一个能执行简单指令自动运行的处理器8051 来控制整个模拟射频模块.此外它还集成一些常用的外设,如4 个不同功能的时钟、I/0 控制器、闪存控制器、高精度ADC、DMA 控制器、看门狗、定时器等.可以说,CC2530 具备实现Zigbee 技术的各种底层硬件需求,是市面上针对低功耗无线传感网络定位的最具竞争力的解决方案[1].CC2530 的外围电路连接图以及硬件框图[2]如下图1,2.

图1 CC2530 外围电路Fig.1 CC2530 peripheral circuit
2 测距技术

图2 节点硬件框图Fig.2 The node hardware block diagram
2.1 几种常用测距算法
无线传感网络测距有三种常见的方法,分别为TOA(基于到达时间)、TDOA(基于到达时间差)和RSSI(基于接收信号强度),这三种方法[3]分别适合于在不同环境下的固定节点与车载节点之间相对距离的测量.
2.1.1 TOA 基于到达时间算法是用光速和信号传输消耗时间之积转化为两个节点之间的距离,TOA 测距具有比较高的准确性,但由于其对时间的严格要求,对硬件要求高,增加了其设计的复杂度.
2.1.2 TDOA 基于时间差的测距技术是利用不同信号在同一介质传输速率不同来得到相差时间,从而测量两节点之间的距离,此方法精度达厘米级,但硬件需求量大,提高测距的成本.
2.1.3 RSSI 基于接收信号强度的测距方法是利用信号在传输过程中能量的损耗程度得出相关节点之间的距离,此测距方法是本系统测距算法的基础.
2.2 停车场测距算法的选择
本系统在上述综述讨论过程中,得出先用RSSI 算法.由接收端的信号强度与传输距离间的对应关系[4],得出RSSI 的公式由下式(1)所示:

式中:RSSI 表示接收信号强度(单位:分贝),A表示为单位距离时的接收信号强度,k是在不同环境下的一个常数,d是距离.由式(1)可得d与RSSI 之间的转换公式,结果如式(2)所示:

2.3 RSSI 测距算法改进-高斯模型
高斯模型:对两节点之间的相对距离的测量,在同一距离下多次测量,接收到n个RSSI 值,其中由于实际环境的干扰,必然会产生一些错误数据[5].通过高斯模型的数据处理原理只选取其中的大概率发生事件的RSSI 值,对于个别由于环境干扰而存在的小概率事件给予滤除.经过这种数据滤波处理后,可以有效减少一些环境干扰对测量结果的影响,一定程度上增大了基于接收信号强度的测距精度.在软件编程方面思路简单,即在移动节点位置时,快速的发送n组数据给连接节点存储于数组Rssi_val[]中,再通过高斯模型进行数据的滤波处理.
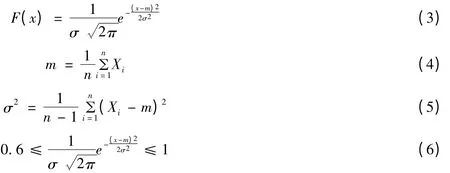
依据以往的经验以及简单测试的结果,本系统以0.6 作为临界值.即通过式(3)高斯模型的分布函数输出其概率结果,当其值小于或等于0.6 时,认为是受到干扰的后而产生的出错事件;当其值大于0.6 时,认为是符合标准的是正常事件.式(4)是求出均值m,式(5)是求出方差σ2,式(6)是用来确定输出数据的具体选值范围.软件处理时,依据此范围,从存储了尚未经过处理的数据数组Rssi_val[]中选值,并存放到最终确知数组Rssi_val_gauss[]中.数据处理并存储后,由式(7)求其几何均值,式中N即为经过高斯模型滤波筛选后得到RSSI 的个数.

基于RSSI 的测距方法,在实际的应用中,硬件要求低,成本低廉,而且在市场上具有多种常见的无线通信模块可以测出RSSI 值,其技术、市场已经相当的成熟,但其又有易受环境干扰、稳定性较差且精度不高等不足.故本系统在软件上采用了基于高斯模型的滤波处理方法,简单有效的解决了其易受环境干扰、稳定性较差的问题,一定程度上提高了其测距精度,给后续的定位算法提供了良好的数据依据,但高斯模型在对于长时间的干扰问题的处理效果有限.
3 定位算法设计
3.1 定位技术在停车场的应用
在ZigBee 定位技术[6]应用在室内停车场中,节点通常分为三种:车载节点,固定节点和连接节点.选定一个无线网络区,此区域包含一些固定节点,一般选4 个到9 个固定节点,一般情况下,定位精度随选取节点数增多而增大.图3 为停车场的节点分布定位图模型,在Zigbee 众多定位算法中,应用于停车场中最典型的是三边定位.

图3 停车场定位图模型Fig.3 The parking lot location map model
3.2 三边定位
假设车载节点O接收到k(k≥3)个固定节点发送的信号,选取这k个节点中信号最强的3 个节点L、M、N作为固定节点来进行计算,根据RSSI 测距方法测量到的距离分别为dL,dM,dN.由dL,dM,dN求出车载节点O的坐标.
如图4 所示,已知L、M、N,3 个节点的坐标分别为(XL,YL)、(XM,YM)、(XN,YN).在选用(XO,YO)作为车载节点O对应的的坐标,则可得车载节点到固定节点之间的距离公式如下式(8)所示:


图4 三边定位Fig.4 Trilateration
4 RSSI 测距实验
使用基于Zigbee 的硬件平台为无线通信平台,采用德州仪器CC2530 来完成固定节点和车载节点的通信以及RSSI 的采集实验.采用两种数据处理模型进行对比分析.其中一种是几何均值法,实测100 次RSSI 不作任何处理直接进行几何均值所得RSSI 值;另一种是基于高斯模型原理的数据滤波处理后,再求其几何均值.两种算法的实测数据经过公式(2)转换输出测距数据(根据实际情况选取式(2)中的k=2.15,A=-43 dBm),实验结果如表1.

表1 高斯滤波前后数据对比Tab.1 Gaussian filter data before and after contrast
通过MATLAB 仿真平台对以上的两种模型所得数据进行进一步的比较:在第一种模型中,我们取实验的次数N=100;在后一种模型中,选取临界值为0.6. 根据表1 中所测得数据,在分别求出其对应误差,在MATLAB 中分析,结果由图5 所示.由直接均值法得出测距数据在4m 测试范围内最大误差达到0.58 m,为对应测量距离的14.5%,通过了高斯模型对出错事件数据的滤波处理后,在4 m 范围内最大误差降到只有0.24 m,仅为对应测量距离的8.2%.实验证明,采用了基于高斯模型的滤波处理后,有效减少了一些不利环境干扰对测量结果的影响,一定程度上提高了基于接收信号强度的测距精度.
5 结语
本系统很好的将Zigbee 技术和TI 公司CC2530 芯片应用于停车场定位,设计了基于接收信号强度的无线传感网络,分析了常见测距算法,并在此基础上基于对接收信号强度测距算法运用高斯模型进行优化,使测距数据更准确,最终实现车辆的较准确定位. 本系统具有高稳定性、低成本、高精度等特点,满足了室内停车场定位的基本要求,具有较高的实用价值.

图5 高斯滤波前后误差对比Fig.5 Gaussian filtering error before and after contrast
[1] 杨松,胡国荣,徐沛成.基于CC2530 的ZigBee 协议MAC 层设计与实现[J].计算机工程与设计,2013,34(11):3840-3844.
[2] 郭建广,贾进滢,黄建刚,等.基于无线传感器网络的环境温度监测系统设计[J].湖北民族学院学报:自然科学版,2010,28(3):353-356.
[3] 孙利民.无线传感器网络[M].北京:清华大学出版社,2005.
[4] 白旭华,张瑞峰,张肖萌.基于ZigBee 网络的室内定位系统的设计与实现[J]. 天津理工大学学报,2012,28(2):11-15.
[5] 章坚武,张璐,应瑛,等.基于ZigBee 的RSSI 测距研究[J].传感技术学报,2009,22(2):285-288.
[6] 彭宇,王丹.无线传感器网络定位技术综述[J].电子测量与仪器学报,2011,25(5):389-399.
