泥浆动力旋转导向钻井工具原理及压降计算
2014-12-08李峰飞蒋世全李汉兴周建良李迅科
李峰飞,蒋世全,李汉兴,周建良,李迅科
(中海油研究总院,北京100027)
泥浆动力旋转导向钻井工具原理及压降计算
李峰飞,蒋世全,李汉兴,周建良,李迅科
(中海油研究总院,北京100027)
旋转导向钻井工具的动力来源主要有电池、泥浆动力、涡轮发电机。由中海油研究总院牵头研制的旋转导向钻井工具是以泥浆动力为导向动力来源,通过井底钻柱内外泥浆压差驱动3个导向翼肋的伸缩,控制钻头沿目标轨迹钻进。分析了流量、钻头喷嘴组合、泥浆性能等参数对该压差的影响。现场试验结果证明了理论计算的正确性,为研制该类工具提供了理论基础。
旋转导向钻井;工具;泥浆动力;压差
旋转导向系统(RSS:Rotary Steerable System)完全抛开了传统的滑动导向方式,在钻柱旋转的状态下自动、连续、灵活地调整井斜和方位,大幅提高了钻井速度和安全性,井眼轨迹的控制精度高,在世界范围内的许多现场应用中都产生了巨大的经济效益。20世纪90年代初,国外开始研究旋转导向钻井技术,到20世纪90年代中期,已有美、英、德、意、日5个国家的8家大公司掌握并垄断了其工程应用和商业化技术服务市场。这项技术总体上仍处于快速发展之中,国际竞争十分激烈。它的先进性、优越性、方向性足以表明它是当今世界钻井技术的重大革命。国外较成熟的旋转导向工具还是以BakerHughes的Auto Trak系列、Schlumberger公司的Power Drive系列、Sperry Sun公司的GeoPilot系列最具代表性。国内以中海油研究总院为代表的多家单位展开了旋转导向的相关研究,研制出了原理样机,目前正向工程化应用迈进[1~3]。
投入商业应用的旋转导向工具其导向动力来源主要有3类:泥浆动力(以Power Drive系列为例)、发电机(以Auto Trak系统为例)、电池(以Geo-Pilot系列为例)[4~7]。中海油研究总院与西安石油大学等单位联合研制的旋转导向钻井工具也依靠泥浆动力作为导向动力的来源,对于泥浆动力性能的分析关系到旋转导向工具是否能够完成导向钻进能力。本文以泥浆动力的旋转导向工具为例,对其动力特性进行分析和研究。
1 泥浆动力旋转导向基本原理
中海油研究总院研制的旋转导向工具主要通过不旋转套上3个均布翼肋的伸出和收回形成偏心,从而形成导向能力[8]。3个翼肋的伸出和收回主要通过液压系统实现,但液压系统的动力来源并非液压泵,而是钻井循环系统中导向工具内外的泥浆压力差。其中,单个翼肋控制具体由定位总成实现,原理框图如图1所示。
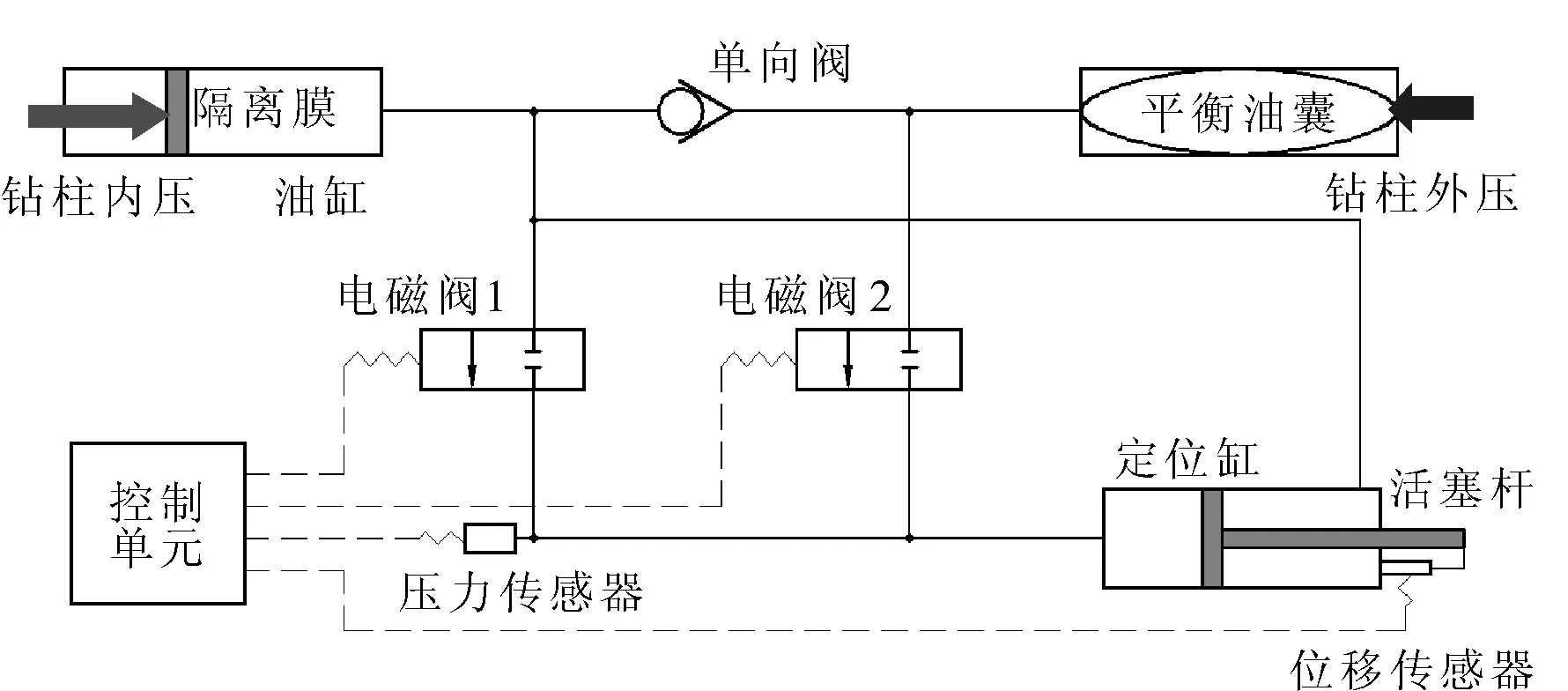
图1 定位总成原理框图
定位总成是旋转导向钻井工具翼肋动作的控制机构,其主要由机械系统、液压系统和测控系统3部分组成,基本原理如图1所示。其中,液压系统主要包括油缸、隔离膜、定位缸、平衡油囊、单向阀等;测控系统主要包括2个电磁阀、1个位移传感器、1个压力传感器和MCU控制单元。由此可知,定位总成液压系统中并不包含传统液压系统中的动力源,在本系统中定位缸活塞杆动作主要通过钻柱内外泥浆所形成的压力差来驱动,定位缸活塞杆具体的伸出、收回、锁定等动作则主要是依靠测控系统来控制实现。其具体工作过程是:
1) 翼肋伸出 当需要翼肋伸出时,1#电磁阀打开,2#电磁阀关闭,液压油在钻柱内高压泥浆作用下,在定位缸处形成差动液压系统,推动活塞杆向外伸出,推动翼肋伸出。同时测控系统实时监测活塞杆的伸出情况,当达到预定位置后,则关闭1#电磁阀,完成翼肋的伸出动作。
2) 翼肋收回 当需要翼肋收回时,1#电磁阀关闭,2#电磁阀打开,液压油在钻柱内高压泥浆的作用下流向定位缸背压腔,正压腔液压油则通过2#电磁阀流向平衡油囊,驱动活塞杆复位,拉动翼肋收回。同样测控系统在控制2#电磁阀打开的同时通过位移传感器实时监测活塞杆的收回情况,当活塞杆收回至预定位置后则关闭2#电磁阀。
3) 翼肋位置锁定 当1#、2#电磁阀均关闭时,由于液压油无法形成回路则锁定活塞位置,进而锁定翼肋伸出位置。
4) 回油 由图1可知,在工作过程中液压油并未返回油缸,除液压系统中需要外,部分液压油流向了平衡油囊。当系统多次伸、缩翼肋后,可能导致液压系统中无液压油的情况出现,为避免该情况出现,需要在系统完成一定伸缩次数后实现液压油的回油。当泥浆泵停止工作后,由于钻柱内外压差的消失,液压油在平衡油囊的挤压下则通过单向阀流回油缸。
由此可见,泥浆旋转导向钻井工具导向的动力来源为钻柱内外泥浆压差,如果需要形成导向能力,则首先需要在定位总成内外形成一定的压差。
2 泥浆动力来源压差计算
为保证旋转导向钻井工具翼肋伸出、收回等动作正常,则需要保证在井底定位总成内外形成一定的泥浆压差。对于钻井系统而言,其钻柱内外压差主要是由于泥浆的流动所造成的,针对在研旋转导向钻井系统构建其泥浆循环系统,如图2。
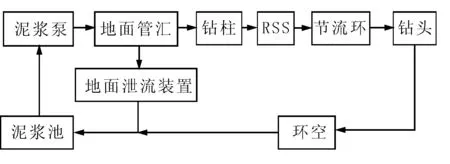
图2 旋转导向钻井系统泥浆循环流程
由图2知,假设旋转导向钻井系统(RSS)正常工作时内压为pin,外压为pout,则有如下关系:

式中:ph,pbit,pa分别是泥浆在节流环、钻头及环空中的压力损耗。
旋转导向工具所需要的内外压差:

也即旋转导向工具正常工作所需要的动力来源主要取决于钻头及内置节流环的压力损耗。因此对于该两部分的计算则对旋转导向钻井工具的现场试验有重要参考和借鉴价值。
2.1 节流环压降计算
为保证导向工具有足够压降,在旋转导向工具内部设置了节流环以提高压降,增加整个工具的驱动能力,节流环结构如图3所示。喷嘴是长度不大于直径2~3倍的短管道。由此可以将其等效为喷嘴进行计算。根据其结构特性选取收缩系数Cc=1,流速系数Cv=0.98[9]。由理想流体能量方程,得:

假设系统泥浆流量为Q,由连续方程,则:

式中:ρ为泥浆的密度;g为重力加速度;A1、A2表示截面1和截面2的过流面积;p1、p2,Z1、Z2,V1、V2,分别代表泥浆在截面1和截面2处的压力、高度、实际流速;V2i表示无水头损失时的理想流速。
对于V2i和和V2有如下关系:

忽略高度影响,联合式(4)~(6),化简后可得:

将已知的流速系数及截面积带入上式,则通过节流环的压降Δp丁有如下关系:

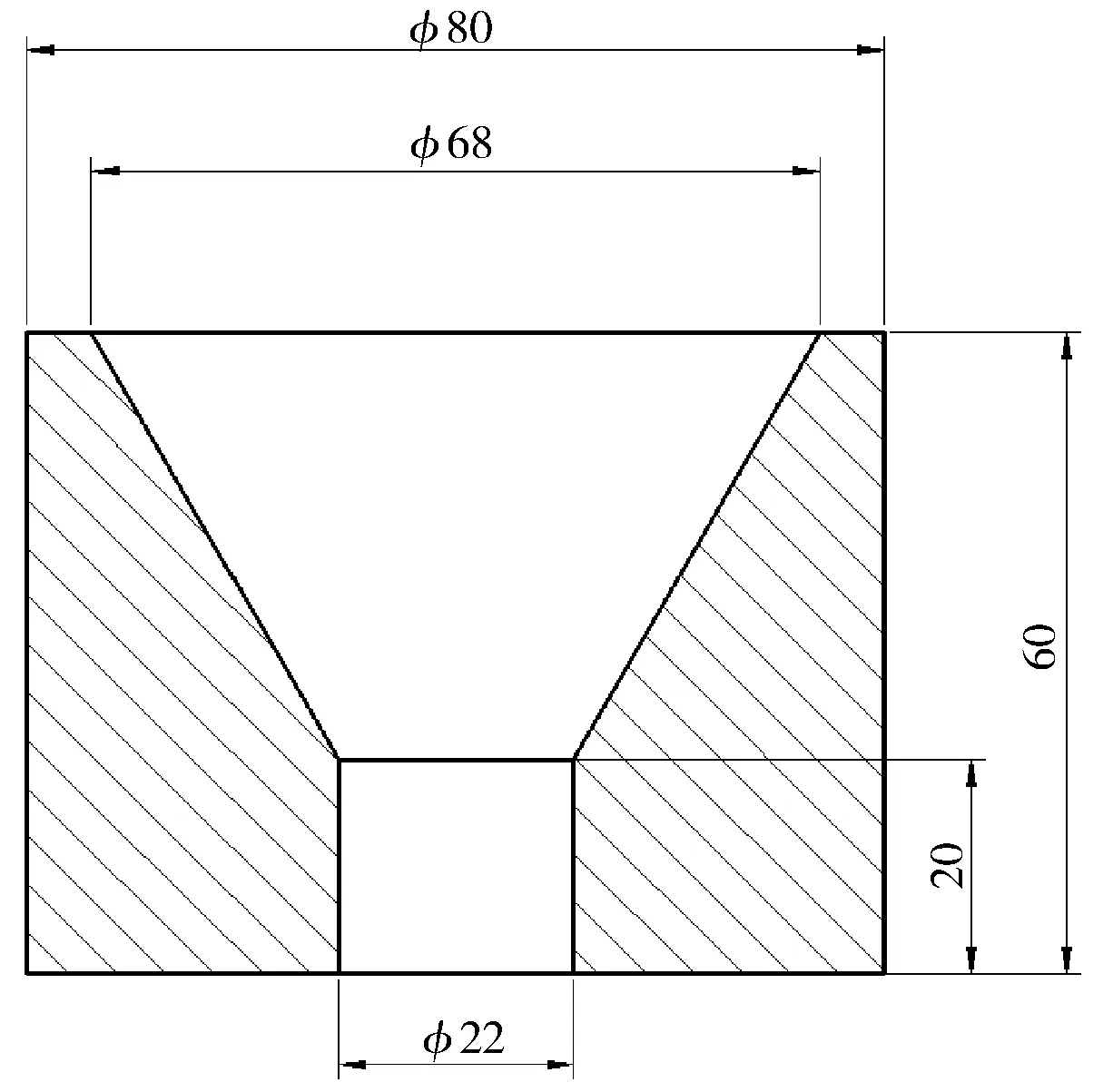
图3 节流环结构
2.2 钻头压降计算[10~11]
对于钻头,其压降计算和节流环相似。在实际工程应用中一般先计算其等效当量直径,然后将其等效为当量直径大小的喷嘴进行计算。假设喷嘴直径分别为d1、d2、d3、d4、d5,当量截面积为A,当量直径为d,则:

因钻头入口直径相对较大,在实际工程应用中一般采用下式进行钻头压降计算。

工程中选取流速系数Cv=0.98,带入式(1)化简后得:

3 现场压降计算及试验
2012-03,研制的旋转导向钻井工具在天津塘沽钻采基地进行试验,对旋转导向泥浆动力进行分析。为保证导向工具翼肋正常伸出导向,要求泥浆泵冲次为90 min-1时,在井底旋转导向工具内外产生不少于6 MPa的压差。
泥浆泵采用NB-1600F型泥浆泵,缸套直径170 mm,泥浆泵冲次及流量对应关系如表1所示。

表1 试验用泥浆泵冲次及流量关系
经实际测定,泥浆密度1.08 g/cm3,黏度0.0031 Pa·s;使用215.9 mm(82英寸)PDC钻头。经初步计算选用喷嘴组合:4个9.52 mm和1个7.94 mm。
3.1 节流环及钻头压降计算
3.1.1 节流环压降计算
按照当前试验条件完成了不同泵冲次下节流环的压降计算,结果如表2所示。

表2 节流环压降计算结果
3.1.2 钻头压降计算
由试验钻头水眼组合,根据式(8)计算其当量直径d=20.64 mm,按照当前试验条件完成了不同泵冲次下钻头的压降计算,结果如表3所示。

表3 钻头压降计算结果
由表1及表2数据,得钻头及节流环累计压降数据如表4所示。

表4 累计压降计算结果
由计算可知,在当前水眼组合下泥浆在31.13 L/s时,在钻头及节流环可以达到约8.6 MPa的压差,完全满足旋转导向实际工作需要。
3.2 钻头压降试验
为对计算结果进行验证,同时也保证在实际工作中导向工具内外所能形成的压差达到工作需要,在试验现场对钻具进行了实际的压降测试。具体试验条件如下:
钻具组合:215.9 mm PDC+RSS+Flex+1根127 mm钻杆。
在井口通过调整不同的泥浆泵冲次,旋转导向工具记录试验过程中内外压力的大小,试验结束后提取旋转导向工具内部数据计算为内外压差,具体数据如表5所示。
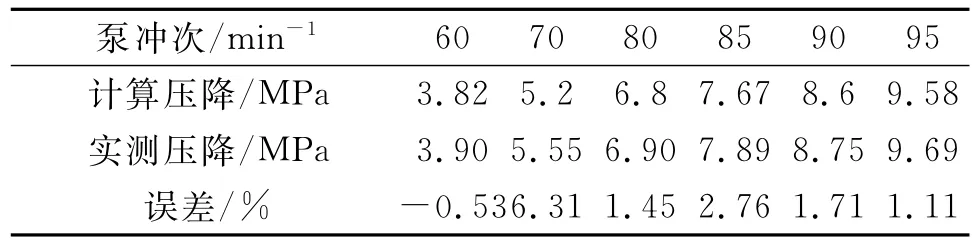
表5 试验结果
绘制计算压降及实测压降曲线,如图4所示,可知,理论计算压降和实测压降有很好的吻合度,能反映现场实际工况。
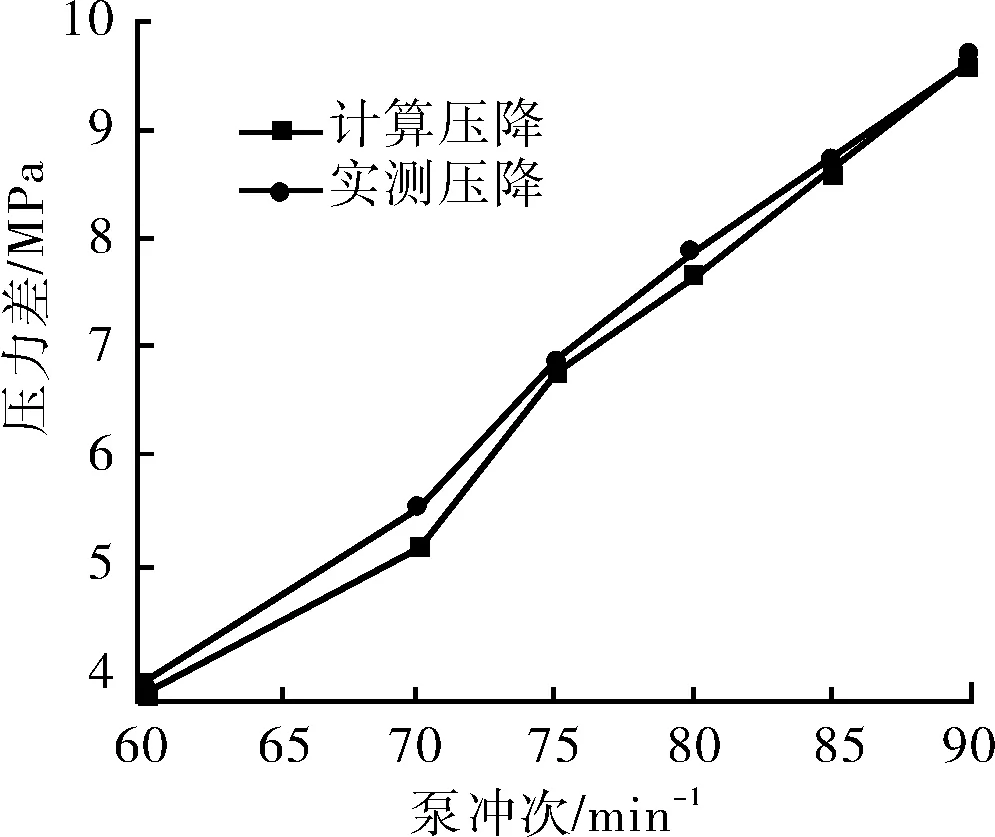
图4 压降计算数据及试验数据对比
4 结论
1) 分析了基于泥浆动力的旋转导向钻井工具导向翼肋的工作原理,并理论计算了导向工具的动力特性。
2) 基于泥浆动力的旋转导向工具,其自身动力来源主要是工具内外的泥浆压差,该压差将主要由导向工具自带节流环和钻头压降两部分组成。
3) 影响旋转导向钻井工具动力的主要因素为钻头和水眼的过流面积,以及系统泥浆循环流量。
4) 理论计算的压降基本和现场试验数据吻合,可为旋转导向现场试验的节流环设计、喷嘴选择以及流量大小提供参考和指导。
5) 经多次现场试验,所提供喷嘴组合、节流环均能满足旋转导向翼肋动作需要,各项工作正常。
[1] 李作会,孙铭新,韩来聚.旋转自动导向钻井技术[J].石油矿场机械,2003,32(4):8-10.
[2] 蒋世全,姜伟,付鑫生,等.旋转导向钻井技术研究进展[C]//中国石油学会石油工程学会工作部钻井组论文集.北京:石油工业出版社,2007:176-182.
[3] 李峰飞,蒋世全,李汉兴,等.旋转导向钻井工具信号下传系统研究[J].中国海上油气,2012,24(6):42-46.
[4] 孙铭新,韩来聚,李作会.静态偏置推靠钻头式旋转导向钻井系统介绍[J].石油矿场机械,2003,32(6):4-7.
[5] 肖仕红,梁政.旋转导向钻井技术发展现状及展望[J].石油机械,2006,34(4):66-70.
[6] 张绍槐.现代导向钻井技术的新进展及发展方向[J].石油学报,2003,24(3):82-85.
[7] 闫文辉,彭勇,张绍槐.旋转导向钻井工具的研制原理[J].石油学报,2005,26(5):94-97.
[8] 李汉兴,姜伟,蒋世全,等.可控偏心器旋转导向钻井工具偏心位移控制分析[J].中国海上油气,2008,20(3):
184-188.
[9] 约翰D安德森.计算流体力学基础及其应用[M].吴颂平,刘赵森,译.北京:机械工业出版社,2007.
[10] 赵金洲,张桂林.钻井工程技术手册[M].北京:中国石化出版社,2010.
[11] 张辉,高德利,唐海雄,等.流花油田超大位移井泥浆泵设备能力分析研究[J].石油钻采工艺,2006,28(2):4-6.
Analysis on Dynamic Characteristics of Mud-Powered Rotary Steerable Drilling Tool
LI Feng-fei,JIANG Shi-quan,LI Han-xing,ZHOU Jian-liang,LI Xun-ke
(CNOOC Research Institute,Beijing 100027,China)
Now,the mainly power of the rotary steerable drilling tools that had commercial applied were:battery,mud power,turbine generators,etc.The rotary steering drilling tool that was developed by CNOOC Research Institute was powered by the drilling mud.It could control the well trajectory by the three pads’hold in and out that would get the bit depart from the axes of the well,and then realized the orient drilling.Then,the effect of flow and characteristics of the mud,and the effect of nozzle combination of the bit were analyzed,and a reference to the tool’s field test was provided.The results of the field test proved the correctness of the theoretical calculation,and this study would provide theory basis for the development of the mud-powered rotary steerable drilling tools.
rotary navigational drilling;tool;mud-powered;differential pressure
TE921.201
A
1001-3482(2014)02-0043-05
2013-09-11
国家高技术研究发展计划(863计划):旋转导向钻井系统工程化技术研究(2007AA090801)
李峰飞(1983-),男,河南嵩县人,工程师,博士,2010年毕业于中国地质大学(武汉)钻井工程专业,主要从事钻完井相关研究工作,E-mail:liff2@cnooc.com.cn。