一种双体船片体龙骨线测量数据的处理方法
2014-12-06李双俊
李双俊
(4801工厂 汕头修船厂,广东 汕头 515011)
一种双体船片体龙骨线测量数据的处理方法
李双俊
(4801工厂 汕头修船厂,广东 汕头 515011)
文章针对小型双体船,提出一种片体龙骨线测量数据的处理方法。在基于等精度测量的基础上,利用线性最小二乘法和测量误差处理原则,通过对任意2次龙骨线数据相对差的直线拟合,得到片体龙骨线相对变形量、相对平移和相对扭曲角度。该方法可用于船舶完工阶段和修理过程船体龙骨线测量数据的处理。
双体船;龙骨线;测量;数据处理
船舶在中修过程中,应建立船体监督线和船体基准线,对修理各阶段船体变形情况进行监测。常见的船体监督线包括甲板监督线、船体舷侧监督线(一般设置在船体舷侧水线上下区域强结构所在的外板位置上),船体基准线主要是船底龙骨中心线(简称龙骨线)。船底龙骨线测量的实质就是对船体中纵剖面内相对于船体基线的直线度的测量。由于双体船结构的特殊性,对其龙骨线的测量和数据处理,除直线度外,还涉及片体龙骨线之间的相对平移和扭曲角度。
1 测量方式和要求
船底龙骨中心线测量属于大、中几何尺寸的测量,按照直线度测量基准的不同,常用的测量方法有:①实物测量基准测量,如拉钢丝测量等;②重力水平基准测量,如液面法;③光线基准测量,如准直望远镜法、激光准直法等[1]。
由于本文中目标小型双体船采用2列片体龙骨墩布墩上排,受墩位设置影响,对其龙骨线的测量采用液面法进行。测量时,在船台选取一固定物设置测量基准,在双体船2个片体龙骨中心线上按一定的间隔选取若干个肋位进行测量。
测量过程按照等精度测量的原则[2],对测量人员、量具和测量环境提出一致性要求。测量时,采用相同的水平管和直尺,由固定的测量人员对准测量基准,固定的测量人员读取数据;在基本一致的时间和温度条件下进行;避开日照以及一切影响测量的施工作业。为确保测量数据的准确性,要求每一位置测量3次,对测量数据存在明显偏差的位置进行复测。测量数据按表1记录。
2 数据处理
2.1 坐标系统
测量数据处理时,采用右手直角坐标系统,基线为X轴,基线与尾垂线交点为坐标系原点。X轴向船首为正、Y轴向左舷为正、Z轴向上为正;角度和平移的方向与右手坐标系统的规定一致。

表1 片体龙骨中心线实测数据表 mm
注:龙骨高为测点位置测量基准距龙骨中心线位置的高度,等于3次测量平均值减去该处龙骨板厚度。
2.2 数据基本分析步骤
本文所指的相对量,是指在任意2次测量数据中,以某次测量的1组数据为相对基准,通过2组数据的对比分析,得到的这2次测量期间1个片体龙骨线的相对变形量、片体间相对平移和扭曲角度。通常采用时间靠前的1组测量数据作为相对基准,如以上排或进坞后测量的第1组数据作为相对基准,通过随后各次测量数据与第1组数据的对比分析,可以掌握船体在一段时间内片体龙骨线的动态变化。
1)同一肋位高度相对差。假定片体同一肋位前后2次测量龙骨高度相对差为zi,则:
zi=后1次测量龙骨高度-前1次测量龙骨高度。
(1)
2)龙骨高度相对差直线拟合。采用最小二乘法[3]按表2进行片体相对差直线度拟合。
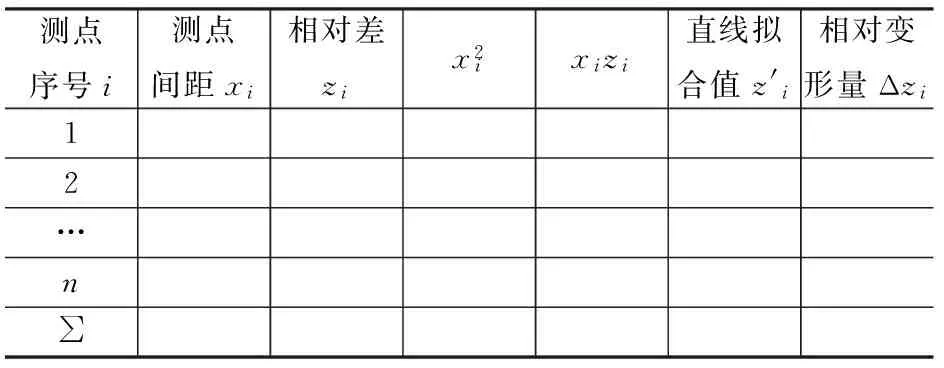
表2 片体相对变形量直线拟合计算表 mm
由最小二乘法计算公式可得:
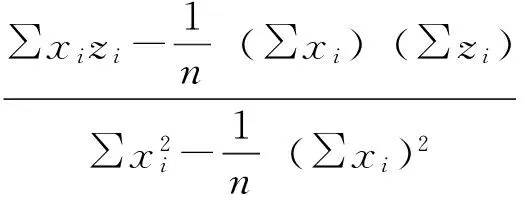
(2)

(3)
拟合直线方程式为:z=a+bx;
拟合直线斜率tanθ=-b,倾角θ=arctan(-b)。
按以上步骤,可求得另1个片体龙骨线拟合直线方程为z=a′+b′x,其直线斜率为tanθ′=-b′,倾角θ′=arctan(-b′)。

Δzi=zi-zi′,
(4)
根据步骤2),2个片体之间相对扭曲角度Δθ=θ-θ′,片体间龙骨线相对平移量Δa=a-a′。
4) 数据分析正确性检查。以上计算过程中,测量数据直线拟合是以相对差zi为数据点进行的,因此,zi数据的正确性直接影响直线拟合和分析结果的正确性。在实际测量中,影响相对差的主要因素包括测量粗大随机误差和修理过程中龙骨的局部变形。相对差正确性检查时服从几何量测量随机粗大误差判定的拉依达准则,即随机误差在±3σ(σ为标准偏差)范围内出现的置信概率为99.73 %,如果某个随机误差超过±3σ范围,则可判定该随机误差为粗大误差。[2]
相对差正确性检查可按以下步骤进行。

以上步骤的分析过程如表3。
依据拉依达准则,如没有出现绝对值大于3σ的残差,则可认为相对差数据是正确的,否则应确认测量数据所对应的测量位置是否存在局部变形或数据存在粗大误差。
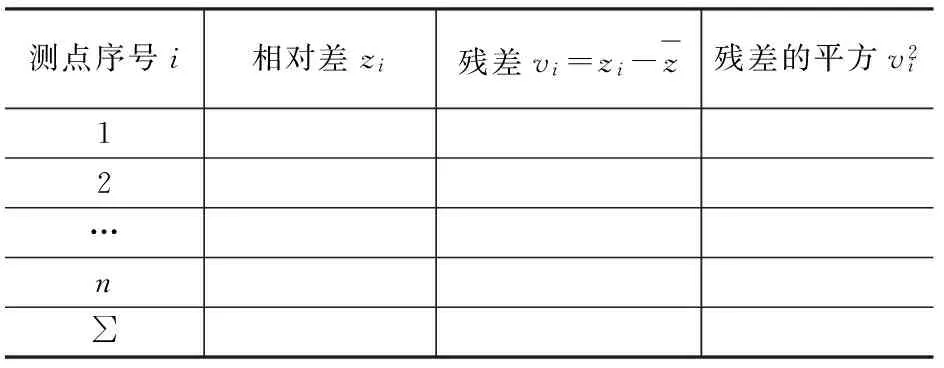
表3 相对差数据正确性检查表 mm
(3)如经确认测量数据所对应的测量位置存在局部变形或数据存在粗大误差时,应进行剔除或复测相应的测量数据,按1)~4)的步骤重新进行分析。
3 实际应用
下面是某小型双体船船底龙骨线2次测量数据相对差的处理过程。
1)片体龙骨线相对差拟合计算如表4。
左片体龙骨相对差拟合直线方程为:
z=-1.109 1+0.000 042 42x;
右片体龙骨相对差拟合直线方程为:
z=-3.018 2+0.000 118 18x;
左片体龙骨相对差拟合线相对右片体龙骨相对差拟合线平移量为:
Δa=-1.109 1-(-3.018 2)=1.91 mm;
左右片体相对扭转角度:
Δθ=θ-θ′=arctan0.000 042 42-arctan0.000 118 18=-0.004 3°。
2)数据分析正确性检查。相对差正确性检查如表5。
由表5可知,相对差数据残差均处于±3σ范围内,可认为相对差数据是正确的。

表4 某船片体相对变形量直线拟合计算表 mm
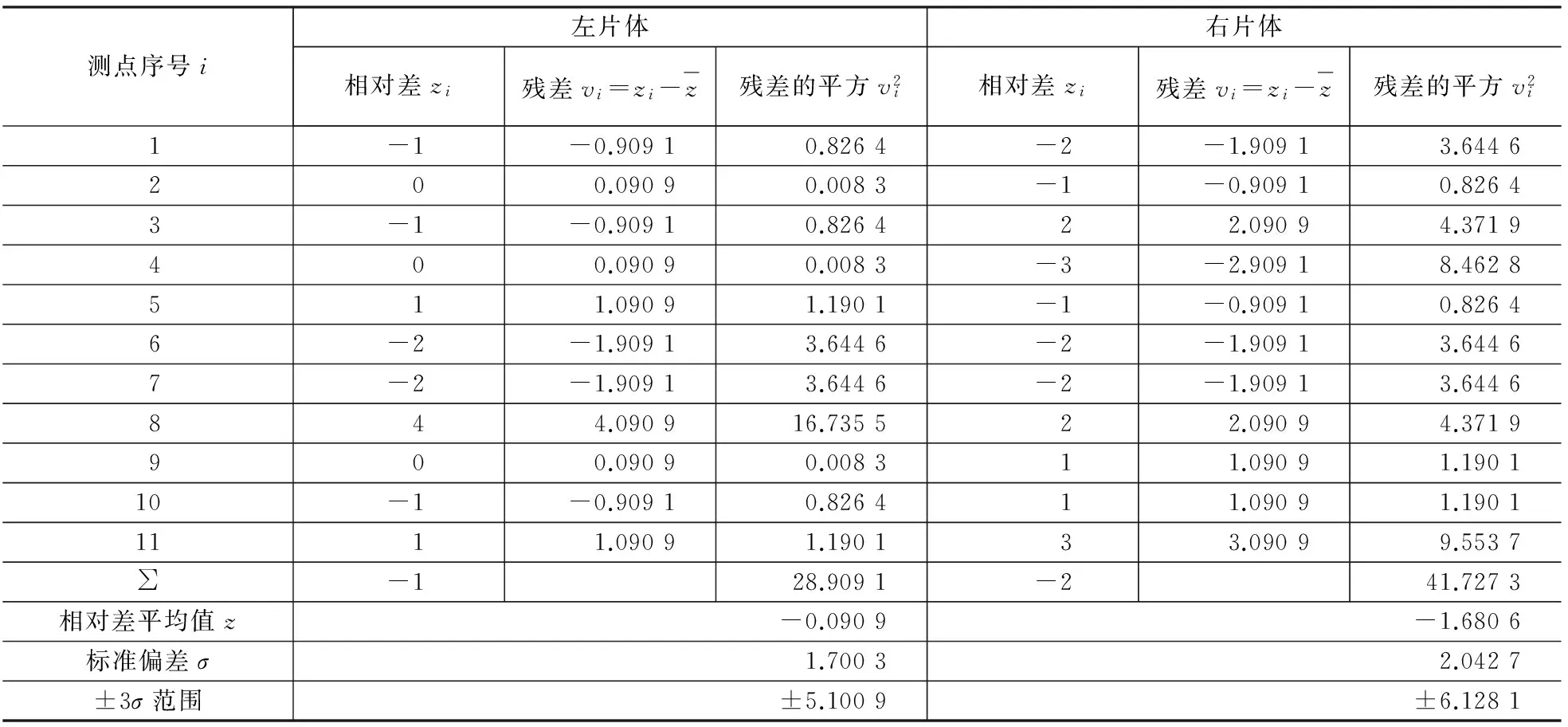
表5 某船片体相对差数据正确性检查表 mm
4 结束语
龙骨线测量是船舶建造完工阶段船体主尺度偏差测量中的主要项目。对龙骨线挠度偏差精度要求,在《CB/T 4000-2005中国造船质量标准》《GJB 3182-1998 水面舰艇船体建造精度要求》中都有具体规定。此外,一些技术标准还要求“为了检查和控制船体变形,舰船在中修时应建立船体监督线和船体基准线”以监测修理各阶段中船体整体变形的情况。
本文提出的小型双体船龙骨线测量数据处理方法,适用于船舶建造完工阶段龙骨线测量和修理过程船体龙骨线监测数据的处理分析。本文中提出的相对量分析,对分析掌握修理各阶段船体变形、扭转和船底相对平移的动态变化,具有一定的指导和借鉴意义。
[1]余光洲.最新船闸电气设计规范与船舶设计制造质量检测技术标准实施手册[M].长春:吉林科学技术出版社,2005.
[2] 韩进宏,王长春.互换性与测量技术基础[M].北京:中国林业出版社,2006.
[3]马振华.现代应用数学手册 计算与数值分析卷[M].北京:清华大学出版社,1997.
The paper introduces a processing method for measuring data of the hull keel line on catamarans,based on the equal precision measurement,the relative distortion,relative translation and relative distortion angle of hull keel line can be gained by using the linear least square method and random error processing principle,and linear fitting the difference of keel line data in any two times.This method can be used for processing the measure-ment data of keel line in shipbuilding and ship repairing.
catamaran;keel line;measure;data processing
U672
10.13352/j.issn.1001-8328.2014.02.008
李双俊(1972-),男,广东潮州人,工程师,大学本科,主要从事船舶维修技术保障工作。
2013-12-05
