矢量阵被动合成孔径算法
2014-12-05余桐奎刘文帅李欣童
余桐奎,刘文帅,王 郁,李欣童
(1.大连测控技术研究所,辽宁 大连116013,2.哈尔滨工程大学 水声技术国家级重点实验室,黑龙江 哈尔滨150001)
0 引 言
水下声隐身性是水下航行器最主要的性能之一,如何有效估计其水下辐射噪声是一个非常重要的问题。传统的水下目标辐射噪声测量多采用单声压水听器进行,该测量方法原理简单,工程实施难度低,虽不能获得空间增益,但是可以使用声压水听器阵列获得空间增益,如果需要获得的空间增益越大,则需要的水听器阵列越长,从而使得工程实现难度大,代价昂贵。同时,随着减振降噪技术的发展,水下航行器辐射噪声在不断下降,采用声压线阵也难以获得更高的增益,利用矢量水听器具有的指向性,且不随频率改变,可以用小尺寸的矢量水听器获得较大尺寸常规基阵同样的增益,该技术已经广泛应用于低噪声目标的辐射噪声测量中。伴随着水下航行器辐射的降低和频率的下移,采用单矢量水听器的方法还很难满足检测要求,矢量水听器线列阵必然是一种首要的选择。基于此原因,本文将被动合成孔径技术应用于矢量线列阵,并给出仿真研究结果。
1 被动合成孔径测量模型
被动合成孔径处理技术是一种通过接收水听器的运动来增加线列阵有效孔径的一种技术。其最主要的优点是通过一个短的拖曳线列阵的匀速直线运动可以获得与长的线列阵相同的增益,从而降低长线列阵的设计建造成本及控制难度。
相对于传统的波束形成技术,信号的增益和角度分辨率都与线列阵的孔径长度有关,常规波束形成的信号增益可以表示为
式中:N 为阵元的个数;d 为阵元间距;λ 为入射信号的波长;θ 为入射角度;θs为变化的角度。
由式(1)可以看出,对于传统的波束形成技术,在相同阵元间距的前提下可以通过增加阵元个数来提高阵增益,同时也增加了线的长度,从而给阵的设计及布放增加了难度。基于此原因,人们提出了一种新的思路,就是通过相对匀速直线运动的线列阵进行采样,经过相位及空间补偿进行子阵合成,得到虚拟的大孔径的一种算法,即称为合成孔径方法。
被动合成孔径的核心思想是利用信号的相关性,扩展的阵元可视为物理阵元时间上的延迟,通过对相位及空间位置的补偿合成一个虚拟长线列阵。

图1 被动合成孔径原理图Fig.1 The theory of passive synthetic aperture
图1 中,拖曳线列阵的阵元个数为N,阵元间距为d,拖曳速度为v。t=0 时刻,N 元线列阵开始对声场进行空间采样,经τs 后,线列阵运动距离为vτ,选择适当的参数v 使得vτ=qd,即线列阵正好移动了q 个阵元的位置,阵元个数增加了q个;当t=Kτs 时,得到的虚拟阵元个数为N+Kq,即得到1 个扩展阵元后的虚拟阵,用此虚拟阵对接收信号进行处理,可以获得比原来线列阵更高的增益。
假设在利用被动合成孔径对舰船进行噪声检测过程中,传播介质均匀且各向同性,拖曳阵位于所测声源的远场,阵元间距远小于入射波波长(d <<λ),且不考虑阵元间的相互耦合作用。根据图1,t=ti时刻,第n 个阵元的输出信号可表示为:

式中:c 为海水中的声速;ψn(ti)为均值为0 的高斯白噪声(由于ψn(ti)为均值为零的高斯白噪声,与声源信号相互独立,因此,在下面推导过程中将噪声项省略)。
由于声源与拖曳线阵之间的相对运动会产生多普勒效应,若目标为窄带声源 s(ti)=Aexp(j2πf0ti),f0为声源频率,v/c <<1,则拖曳阵列接收到的频率为f=f0(1 ± vsinθ/c)。
若忽略高阶项(n-1)vdf0sin2θ/c2,且目标与拖曳阵做相对远离的运动,则ti时刻第n 个阵元的输出信号可写成:

t=ti+τ 时刻,第n 个阵元的输出信号可表示为:

选择适当的v和c,使得vτ=qd,则式(4)可以写成:

t=ti时刻,虚拟阵的第n+q 个阵元的输出信号可表示为:

对比式(5)和式(6)可发现,两式仅差1 个相位差exp(j2πf0τ)项,二者关系可以写成:

因此,可以通过对ti+τ 时刻的xn(ti+τ)进行相位修正合成ti时刻的xn+q(ti),即将N 个阵元的线列阵扩展成N+q 个阵元的虚拟阵,然后利用该虚拟阵对声源信号进行检测。
对式(2)进行傅离叶变化得:
则第K 个子阵波束形成输出为:

其中θs为波束的变化角度。因此被动合成孔径的阵列输出为:

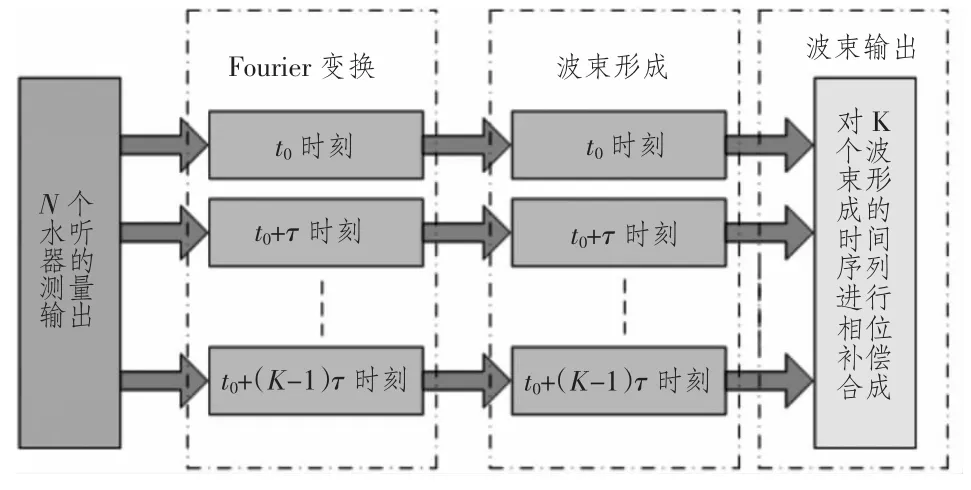
图2 矢量阵被动合成孔径算法流程图Fig.2 The flow chart of passive synthetic aperture based on vector sensor array
2 仿真研究
仿真算例1:假设远场目标声源频率f=1 000 Hz,入射角度θ=25°到达接收阵列,采样频率fs=10 kHz,水听器阵元间距d=0.5 m,采用8 元声压水听器组成的均匀线列阵接收到达目标信号。测量船以6 kn 匀速拖曳着水听器阵列沿着拖曳线列阵的方向向前移动。假定在垂直与阵列方向的速度为0,合成次数H=6 次,仿真结果如图3所示。
由图3 可以看出,相比常规波束形成,被动合成孔径具有更高的空间分辨率,而且具有更低旁瓣级,可以实现水下噪声源近场高分辨定位。

图3 常规波束与被动合成孔径波束对比图Fig.3 Beam output of conventional beam and passive synthetic aperture

图4 声压阵与矢量阵被动合成孔径波束对比图Fig.4 Beam output of passive synthetic aperture based on vector sensor array and sound pressure array
仿真算例2:考虑矢量水听器阵列,其他仿真条件与仿真算例1 相同。
由图4 可以看出,采用常规声压水听器阵被动合成孔径波束在高频段会出现空间混叠,难以准确找到声源的真实位置,对声源定位产生干扰;而矢量水听器阵列就可以有效抑制声源定位中的左右弦模糊,波束主瓣宽度较窄,提高了方位分辨力,获得的空间增益也相对较高。
仿真算例3:考虑矢量水听器阵列,分别只改变阵元数,合成次数,阵元间距及阵元重叠数等参数,其他仿真条件与仿真实验一相同,分析结果如图5所示。
由上述仿真结果可以得到如下结论:
1)阵元数目越多,得到的波束主瓣宽度越窄,获得的阵增益越高;
2)合成孔径次数越多,波束主瓣宽度越窄,获得的阵增益越高;
3)阵元间距取λ/2 时,波束主瓣宽度比λ/3 、λ/4和λ/6 理想,可以降低旁瓣,抑制栅瓣的产生;
4)重叠数越高,波束主瓣宽度越窄,获得的阵增益越高,但是,相对于阵元数、合成次数及阵元间距参数,效果一般。
综上所述,增加阵元数,增加合成孔径次数,选择适当阵元间距和重叠水听器阵元个数,更利于对舰船噪声的检测;但是,也不能无限制的增加阵元数和合成孔径的次数,阵元数过多,工程实现难度加大,同时,合成孔径的基本要求信号的空间相关时间要大于合成孔径的积分时间。

图5 不同参数条件下的仿真结果Fig.5 The simulation results of different parameters
3 结 语
矢量阵被动合成孔径技术将合成孔径应用于矢量线列阵中,通过理论及仿真表明,该方法要优于常规声压阵列,它可以通过阵元数目较少的阵列,得到可以覆盖多个倍频程信号的大孔径的虚拟阵列,具有更高的目标定位精度及可以获得长阵具有的阵增益和方位分辨力,可以降低工程实施难度,适合低噪声目标的辐射噪声测量,具有良好的工程应用价值。
[1]王之程,程宗歧,于沨,等.舰船噪声测量与分析(1 版).北京:国防工业出版社,2004.
[2]孙大军.合成孔径声呐技术研究综述[J].哈尔滨工程大学学报,2000(1):51-56.
[3]HALD J.Combined NAH and beamforming using the same array[J].B&K Technical Review,2005(1):11-39.
[4]白云.噪声测量中矢量水听器被动合成孔径声纳方法研究[D].哈尔滨工程大学,2010.
[5]李瑞英.合成孔径雷达动目标检测与成像[D].哈尔滨工业大学,2010.
[6]GRAF H R.Deeonvolution techniques for imProved array resolution[J].Sixth Intemational Congress on Sound and Vibration.5-8 July 1999,Copenhagen,Denmark:829-836.
