A架式遥控水下机器人收放系统设计研究
2014-12-02杨凯
杨 凯
(杭州电子科技大学海洋工程中心,杭州310018)
ROV在海洋研究、近海油气开发、矿物资源调查取样、打捞和军事等方面都获得广泛的应用,是当前技术最成熟、使用最广泛、最经济实用的一类潜水器。在ROV系统中,收放系统为ROV出入海提供了可靠保证。
国内相关单位在20世纪70年代末已经开展了A形架式收放系统的研究开发工作,目前已经具有与国际专业公司同等的设计能力和技术水平,但是ROV专用收放系统发展并不成熟。
国外ROV专用收放系统已经非常成熟。按照不同的结构形式大概可以分为3种:A形架式收放系统、吊臂式收放系统、桥式收放系统。如英国Saab Seaeye公司的A形架式收放系统、英国Tech Safe Systems公司生产的吊臂式收放系统、挪威Macgregor公司的桥式收放系统等。
1 A-Frame LARS系统构成
A形架式ROV脐带缆收放系统由绞车部分、A形架部分、排缆部分、基架部分、液压动力及控制单元(HPU)5部分组成。
1.1 绞车部分
绞车部分由卷筒、光电滑环、卷筒轴部分、支架部分、刹车系统组成。卷筒用于脐带缆的存储和牵引;光电保证光信号及电信号的传输不因为旋转而中断;支架部分保证卷筒满载情况下能够支撑卷筒顺利工作。
1.2 排缆部分
排缆部分由导杆部分、双向丝杆部分、导向部分组成。导杆部分负责导向部分按照规定角度横向运动;双向丝杆部分可通过其所带飞轮传递卷筒轴转矩,为导向部分提供横向动力,使导向部分往复运动;导向部分有丝杆螺母,保证导向部分往复运动,通过脐带缆的导向槽对脐带缆进行导向,导向槽侧面装有尼龙滚子,可减少脐带缆同导向槽间摩擦。
1.3 基架部分
基架部分由A架基架部分、排缆器支架部分、卷筒保护架部分组成。A架基架部分为A架提供支撑,确保A架在不打开母船围栏的情况下顺利摆入、摆出母船;排缆器支架部分为排缆器提供支撑;保护架对卷筒及液压动力单元具有保护作用,防止工作中无关人员靠近。
1.4 A 架部分
A架部分由液压缸部分、定滑轮部分、门架部分组成。液压缸部分,通过液压缸提供推拉力,确保A架顺利摆入摆出;定滑轮具有导向作用;门架对定滑轮具有支撑作用,保证ROV&TMS能够顺利进出母船围栏。
1.5 液压动力单元(HPU)
本部分由驱动部分、执行部分、控制部分构成。驱动部分为油路提供动力;执行部分为液压缸,将压油路提供的动力传递给绞车及A架;控制部分控制液压阀的开合,调整液压油的流向,使收放系统完成指定动作。
2 A-Frame LARS主要设计参数
2.1 卷筒尺寸
卷筒尺寸主要有卷筒的直径、卷筒的厚度、卷筒的长度三个参数。
2.1.1 卷筒直径
卷筒直径可由公式(1)进行初步确定。

式中 d为脐带缆直径;e为卷筒直径比,流动式起重机建议取16;D为卷筒直径。确定滚筒直径要考虑脐带缆的最小弯曲半径,弯曲过大容易造成脐带缆损坏。在不使脐带缆过于弯曲的前提下,应设计的偏小一些,利于减小绞车重量,减轻绞车起升动载。
2.1.2 卷筒厚度
卷筒厚度可由公式(2)初步确定。

式中 δ——卷筒厚度;d——脐带缆直径
2.1.3 多层卷筒长度
多层卷筒长度可由公式(3)初定。

式中 L为卷筒长度;D筒为卷筒直径。
卷筒长度设计过程中需满足公式(4)。

式中 L筒为卷筒长度;H为卷筒至定滑轮直线距离;λ为脐带缆最大摆角,λ =1°15'~1°30',当滚筒轴转速 nmax>100r/min时,选取λ=1°15';当滚筒轴转速 nmax>100r/min时,选取 λ =1°30'。
2.2 系统牵引力及功率
2.2.1 缆绳载荷
深海ROV系统空气中的重量小于脐带缆完全释放后ROV系统及脐带缆水中的重量,因此作业过程中,绞车最大提升力发生在脐带缆完全释放状态,所以设计中应以此极限状态设计。
ROV系统完全入水后绞车提升力可由公式(5)确定。
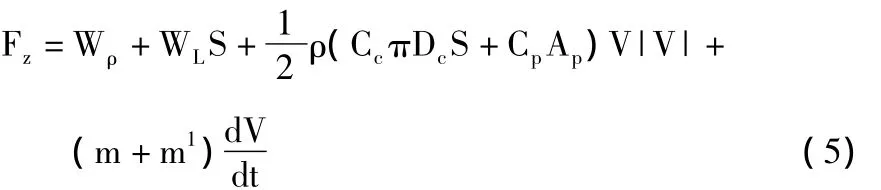
2.2.2 绞车驱动力矩
绞车驱动力矩分为:克服卷筒本身惯性力矩;克服ROV系统起升过程中的重量力矩;排缆器驱动力矩。起升开始状态,此时系统本身惯性、ROV系统提升力、排缆器启动力矩均处于最大状态,因此,此时绞车驱动力矩最大,最大力矩可由公式(6)确定。

式中:T为液压马达转矩(绞车驱动力矩);TR为ROV系统所引起的转矩;FZ——ROV系统绞车提升力;RJ——卷筒直径;TS1——排缆器所引起的转矩;TS2——排缆器双向丝杆转矩;i——卷筒及排缆器传动比;TJ卷筒自身引起的转矩;Jj卷筒转动惯量;V——绞车匀速提升速度。
2.2.3 绞车驱动功率
系统工作工程可分为两个阶段:第一,提升阶段,系统拖动脐带缆及ROV系统回收,马达工作在马达状态。第二,释放阶段,脐带缆及ROV系统拖动绞车运动,马达工作在非马达状态。因此,驱动功率均指脐带缆在提升工况下的功率,匀速收缆时的功率由公式(7)计算。

式中:P为名义传动功率;T为液压马达转矩(绞车驱动力矩);V为ROV系统匀速收放缆时速度;R为卷筒转动半径。
2.3 液压缸最大负载
A-Frame LARS工作过程可分为准备起吊、摆出、投放三个过程,回收为其逆过程。整个过程中,液压缸负载较大位置有两个:第一,A-Frame LARS投放ROV&TMS过程中,ROV&TMS刚入水的时刻。第二,A-Frame LARS回收ROV&TMS过程中,加速提升的过程。
2.3.1 液压缸最大推力负载
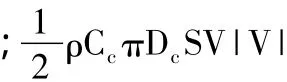
推力负载主要来自于 ROV&TMS重力及 A-Frame自重,受力分析如图1所示。
A-Frame从摆动开始直到直立状态,液压缸均处于推力负载状态,整个过程运动缓慢,可看成匀速运动,易得公式(8):

整个摆动过程中γ1逐渐增大,γ2、β逐渐变小,根据变化幅度的大小易判断,F负推逐渐减小,因此,F负推最大值出现在ROV和TMS刚刚被提起的瞬间。
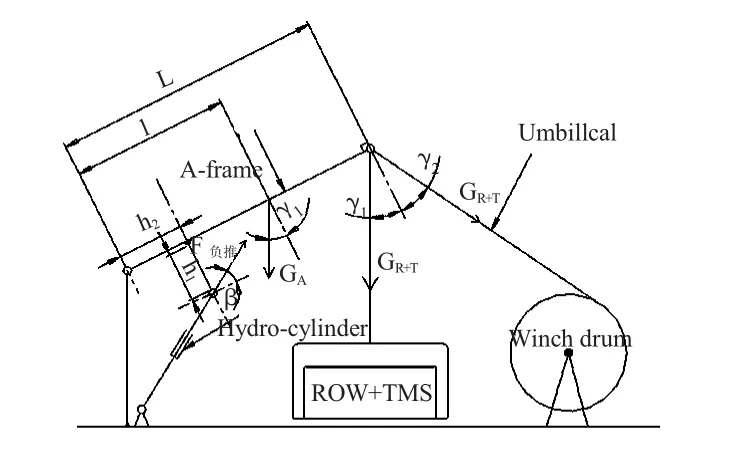
图1 ROV收放系统水外受力分析Fig.1 The outside water force analysis of ROV LARS
2.3.2 液压缸最大拉力负载
拉力从A-Frame呈现直立状态开始。从直立状态到最大摆角处受力分析如图2所示。
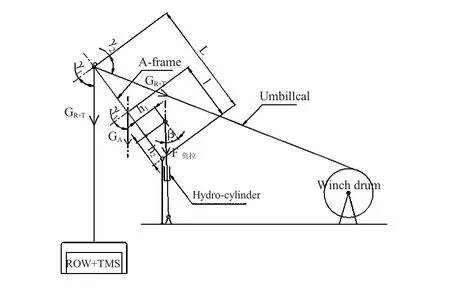
图2 ROV收放系统水内收放系统Fig.2 The inside water force analysis of ROV LARS
整个摆动过程速度很慢,可近似看成匀速摆动,可看成平衡状态,易得公式(9):
整个摆动过程中,β、γ2逐渐增大,γ1逐渐减小。因此F负拉随着摆出幅度的增大逐渐增大。GR+T随着脐带缆的下放长度逐渐增大,因此当脐带缆下放长度最长时为F负拉最大值。
3 总结
通过对深海可移动式ROV脐带缆收放系统的阐述,针对现有考察船A架及绞车系统存在的不足,给出了深海可移动式ROV脐带缆收放系统的工作原理、结构及功能、系统工作过程。通过对系统主要参数的确定,提出了设计此类收放系统各部分主要参数及应注意的问题,望能够为国内设计此类收放系统提供参考。
[1] 中国海洋经济发展战略研究[M].广州:广东经济出版社,2007.
[2] 张志文.起重机设计手册[K].北京:中国铁道出版社,2001.
[3] 姚春冬,等.石油钻采机械[M].北京:石油工业出版社,1994.
[4] 陈育喜,张竺英.深海ROV脐带缆绞车设计研究[J].机械设计与制造,2010,(4):39—41.
[5] Berteaux,H.O.et al.Improvement of Intermedia Oceanographic Winchs[K].WHOI Reference,1985:85.