无人机地震灾情监测系统在四川高原山区的应用研究
2014-11-27柏江玲
程 奕,柏江玲
(四川省地震局,成都 610041)
0 引言
四川是中国地震多发省区之一。根据对全国M≥6级地震次数的统计,四川的地震活动仅次于台湾、西藏、新疆和云南,居全国第5位[1]。在地域上,这些地震主要发生在甘孜藏族自治州、凉山彝族自治州和阿坝藏族羌族自治州(以下简称“三州”);在地质构造上,主要发生在北西向鲜水河断裂带、南北向安宁河—则木河断裂带和北东向龙门山断裂带,其他在巴塘断裂、理塘—德巫断裂、甘孜—玉树断裂、松平断裂和虎牙断裂等也有分布[2]。
“三州”地区位于四川省西部,青藏高原东南缘,处于高原、高山及峡谷地区,地形条件复杂,海拔高差大,气候条件差,因此获取该地区优质的高时间、空间分辨率的卫星遥感数据十分困难。
无人机地震灾情监测系统作为空间数据获取的一项重要手段,具有成本低、机动灵活、可探测高危地区等特点,是获取高分辨率遥感数据的重要工具之一。近年来,已先后应用在汶川地震、舟曲泥石流、盈江地震和芦山地震等重大突发事件中,向各级指挥部门提供实时、准确的现场实况,为领导正确决策和指挥一线工作提供直观、可靠的第一手资料,体现出“技术先进、灵活机动、快速高效、信息全面”的特点。
1 无人机地震灾情监测系统的组成
无人机地震灾情监测系统主要由无人机飞行平台、飞行控制系统、遥感系统、软件系统和无线电遥控系统等几部分组成。
无人机机身主要采用玻璃钢和碳纤维等重量轻、强度大的复合材料加工而成。机身有一定的容积范围,便于放置遥感设备。无人机前端安装性能稳定的航空发动机和推力螺旋桨作为动力装置。为适应高原山区环境野外作业要求,起落装置的设计应充分考虑重量、强度、减震等因素,并可根据需要实行弹射起飞和伞降。
飞行控制系统主要由遥控接收机、GPS 接收板、GPS天线、自动平衡仪、自主飞行控制系统组成。可根据GPS的实时导航信息控制飞机按照预设的航线和高度自主飞行[3]。
遥感系统主要指无人机搭载的各种遥感设备。根据任务,可集成CCD 数码相机、红外扫描仪、磁测仪、合成孔径雷达等,以获取不同类型的遥感影像[4]。地震灾情监测主要采用色彩深度和感光度好、载片量大、可定时曝光的CCD 数码相机,而镜头采用可对焦至无穷远处的大视场、大孔径广角镜头,以获取高分辨率的全色影像。
软件系统主要包括监控无人机飞行状态的地面监控软件,规划飞行区域、航线、拍摄点等的航迹规划软件,以及对影像数据进行加工处理的影像处理软件。
无线电遥控系统用于传送无人机和遥感设备的状态参数,供地面人员实时掌握无人机的飞行姿态、速度、航向、高度、方位、距离等信息,以及遥感设备的有关信息。同时,还可以发送地面人员的指令,引导无人机按照指令飞行。
2 无人机地震灾情监测系统技术流程
无人机地震灾情监测系统主要由前期准备、航拍、后期处理与分析3个阶段组成。前期准备阶段主要包括图上作业、定点勘察、飞行条件测试、航线设计和飞行指令传输等[5]。在高原山区尤其要注意获取当地的风力、能见度、有无雨雪等气象资料,对于高山峡谷还要精确大地经纬度和高程数据。后期处理与分析阶段主要包括数据下载、图像处理(图像匀色、拼接、几何校正等)、信息提取分析和应用等[3]。图1为无人机地震灾情监测系统技术流程图。
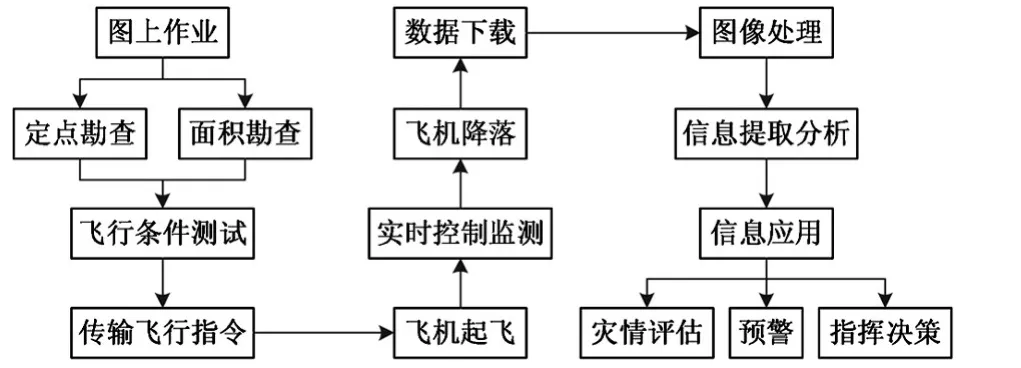
图1 无人机地震灾情监测系统技术流程图
3 无人机地震灾情监测系统在高原山区的应用研究
3.1 应用实例
国道213线途经阿坝州境内松潘、茂县、汶川、映秀镇,止于都江堰的路段,基本沿岷江展布,两岸地势高耸,地质结构复杂、生态环境脆弱,常有滑坡、泥石流、飞石等地质灾害发生。2008年5月12日的四川汶川8.0级特大地震发生后,该“震中生命线”更是数度中断,中国在这次地震中第一次将无人机应用于抗震救灾。如图2所示为汶川地震期间使用无人机拍摄到的国道213线映秀到汶川段航空影像图,图3为图2标示部分的放大影像。

图2 国道213线航空影像图

图3 图2标示部分的放大影像图
由以上2图可以发现,该路段存在严重的山体破碎和滑坡现象,且道路已被完全堵塞。该影像图为抢险救援力量的调配提供了重要的依据。
2013年4月20日的四川芦山7.0级强烈地震发生后,无人机不仅用于灾情监测,为指挥决策提供了大量直观的第一手数据,同时还在震后科学考察(如寻找断裂带等方面)进行了有益探索。图4为无人机在雅安市名山县建山乡附近拍摄到的航空影像图。

图4 建山乡附近航空影像图
3.2 应用中存在的问题及解决方法
通过几次在四川不同地点的飞行,对无人机地震灾情监测系统在四川应用中存在的问题进行了总结:
(1)无人机受天气等因素的影响是不可避免的。高原山区海拔高,天气变化快,雷暴、冰雹等强对流天气较多,风向突变或风速突变现象明显,风的阵性及扰动气流很强[6]。因此,航拍的影像数据受飞机载荷量以及抗风能力的影响较大,应尽可能地改进飞机硬件平台,增强稳定性,提高有效载荷、续航和抗风抗雨雪能力。
(2)高原山区地理地形特征复杂,起伏较大,需要设计不同高度的航线轨迹,同时进行不同高度的多尺度航拍任务。
(3)无人机航拍影像受气流影响几何变形大,同时因为影像像幅较小、数量较多,获取的影像资料拼接成完整图幅在现有技术条件下,花费时间较长。由于救灾应急工作的特殊情况,对图像的完整性和规范性要求不高,只需满足目标地物的判读即可。因此,可根据应急灾情监测实际出发开发影像快速处理软件,进行航拍影像的快速自动识别和拼接。
(4)航空飞行管制,尤其是大地震发生后早期抢险救援阶段,十分严格,申请飞行空域时间较长,工作人员应提前对航拍区域提出飞行区域申请。
4 结论
无人机地震灾情监测系统具有运行成本低、执行任务灵活性高等特点,是快速获取震后灾情信息的重要手段[7]。将该系统应用于高原山区,将在提升地震灾情现场勘查能力、迅速获取灾情信息、增加救灾工作的时效性及为后期科学考察提供辅助信息等方面提供重要的技术支撑。
[1] 曲梓镌.四川历史上的地震带[J].文史杂志,2008,(4):106.
[2] 江在熊.四川历史上的地震灾害[J].文史杂志,2008,(4):50.
[3] 臧克,孙永华,李京,等.微型无人机遥感系统在汶川地震中的应用[J].自然灾害学报,2010,19(3):163.
[4] 胡堃.基于无人机遥感平台的震后灾情监测系统[J].科协论坛,2009,(1):100.
[5] 吕书强,晏磊,张兵,等.无人机遥感系统的集成与飞行试验研究[J].测绘科学,2007,32(1):85.
[6] 许培贞.高原机场的复杂天气与飞行气象服务[J].空中交通管理,2004,(5):165-166.
[7] 张晖,赵颖,李雅静.地震灾害快速评估结果检索软件设计[J].华北地震科学,2012,30(4):61-64.