高光谱成像仪等效焦面装调模组设计
2014-11-26高志良
高志良
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
1 引言
目前高性能空间光学遥感器普遍采用传输型数据获取方式,制造过程中均涉及到CCD组件的装配调整[1-3]。由于CCD器件昂贵且易损坏、定位精度要求高,故装调时的安全、工作效率问题突出。
CCD焦面组件在高光谱成像仪主体上的安装是整个光机装调的最后一个环节。此前通过对光谱仪和望远物镜的装调,可确保成像光谱仪的光谱分辨率和空间分辨率[4-5],此时狭缝展开的光谱面与成像光谱仪主体的相对位置已经固定。焦面装调的目标,就是将其固定于主体,保证光谱像面准确落在CCD感光面上:(1)纵向上须保证各视场、各波长光谱像离焦量均不超过焦深;(2)横向上须满足CCD空间维平行于单色像方向,特定波长在CCD光谱维上的像元编号符合设计值等指标。由于棱镜色散光谱仪固有的谱线弯曲、梯形畸变[6-7]以及谱线漂移,第二个要求往往难以严格满足,但可以通过光谱定标[8-12]缓解;第一个要求是CCD焦面组件装调的关键。
实际状态下,由于存在光学与机械基准不重合误差、光学元件曲率半径和离轴量加工误差、结构件加工误差,光谱面相对于主体框架的位置与设计值亦存在误差。高光谱仪光学件、机械元件众多,导致累计误差更大,相对于系统焦深这些误差是不可容忍的,需要用修磨垫进行相应的补偿,使CCD焦面组件安装后的感光面与光谱面准确重合。
传统的CCD焦面组件安装方法[13]是在其工作状态下微量移动焦面组件的位置,以输出图像的清晰度或能量集中度最高为判据确定焦面正确的位置。此法需对焦面带电操作,且难以准确测量修磨垫的修整量,CCD损坏风险较大、装调效率较低。本方法设计等效焦面装调模组,可准确获取垫片需要的修整量,极大减少对CCD组件的拆装次数,降低损坏风险、提高装调效率。
2 工作原理与结构设计
2.1 工作原理
如图1所示,等效焦面模组由分划板和支撑、结构件构成。分划板朝着光谱像的一面有针对不同谱线的多条细刻线,相互位置符合单色像的色散设计间隔。以CCD组件尺寸的实测数据为依据,精密制作等效模组,使模组下端面和刻线面的距离等价于CCD组件下端面和感光面的间距,其中考虑了CCD保护玻璃的厚度对光谱像距的延长,目的是当光谱像与模组的刻线重合时,若用CCD组件替换等效模组,光谱面能准确落在感光面上。
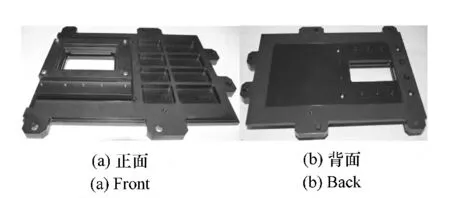
图1 等效焦面装调模组Fig.1 Equivalent focal plane assembling module
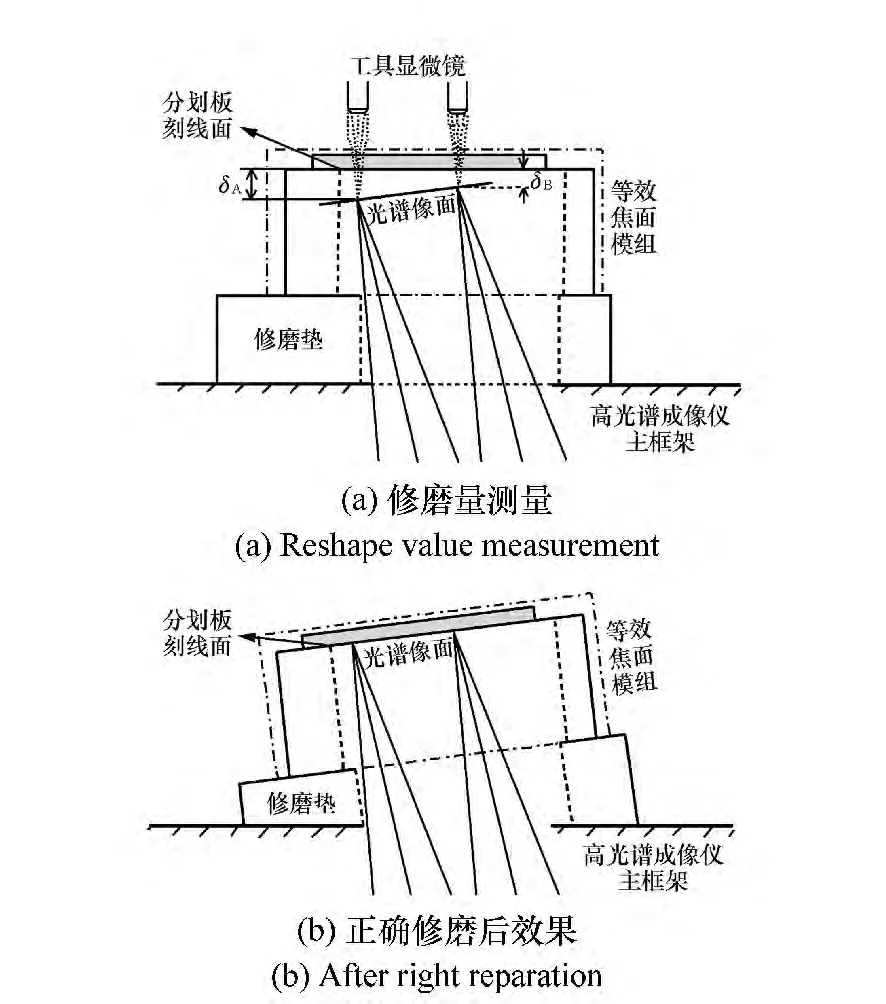
图2 等效模组工作原理Fig.2 Operating principle of equivalent module
焦面装调的关键是准确确定修磨垫的修磨角度和深度并实现其高精度加工。图2(a)是修磨量测量示意图,用高压汞灯照射光谱仪狭缝,可在光谱像面上形成特征波长的清晰单色像。通过短焦深的工具显微镜(可见近红外波段采用目镜筒处连接红外变像管的方法)观察光谱像和刻线的横向位置,若有差别可平移、转动等效模组实现光谱像与刻画线的横向对准;读取多视场、多波长的离焦量δ,即可确定修磨垫理论修磨量,据此对其数控加工、手工研磨,直到满足光谱像面与刻线面准确重合的要求,如图2(b)所示。由于等效焦面组件与真实CCD组件具有高度的互换性,保证了CCD组件一经安装即满足焦深要求。
2.2 等效焦面装调模组结构设计
等效焦面装调模组的结构设计如图3所示,定位块的作用是确保模组换为CCD组件时的横向位置。图4是等效模组的分划板。
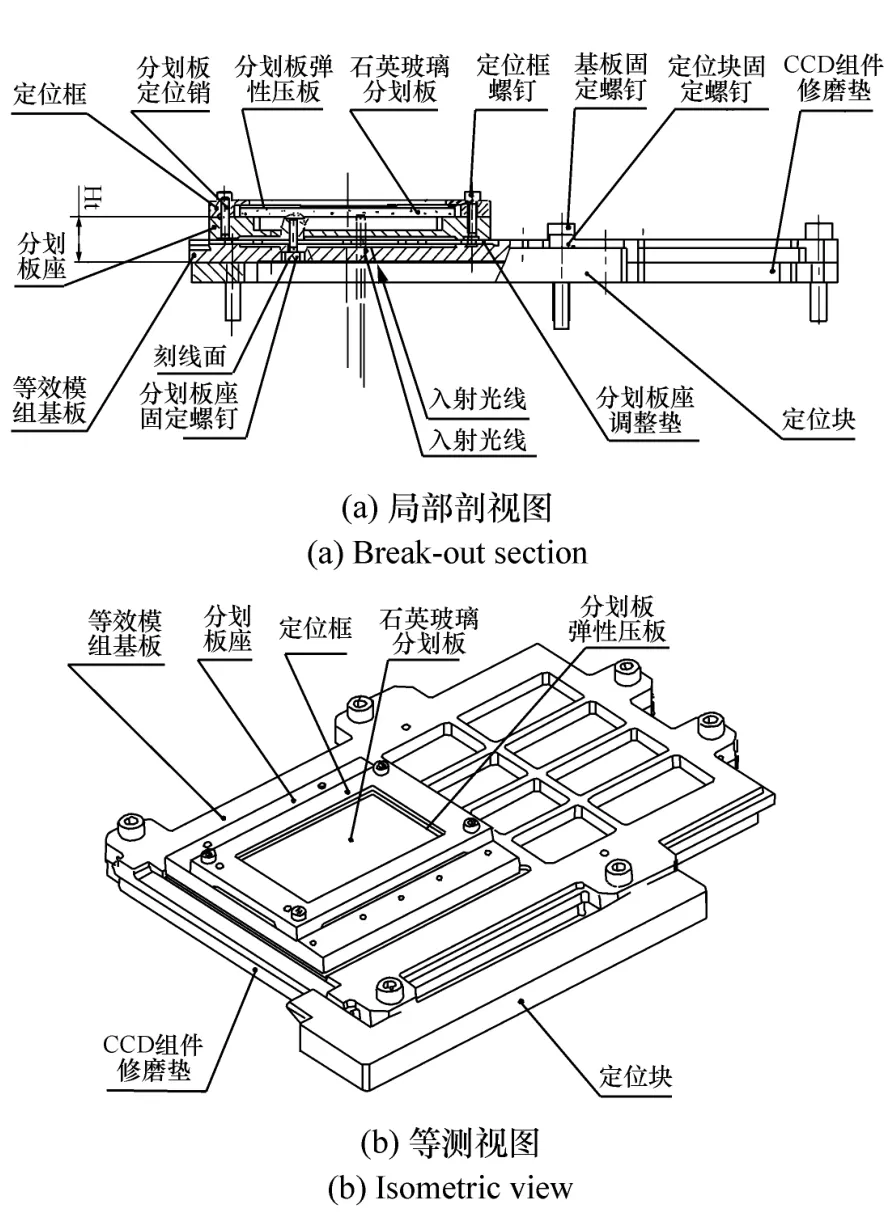
图3 等效焦面装调模组设计Fig.3 Design of equivalent focal plane assembling module
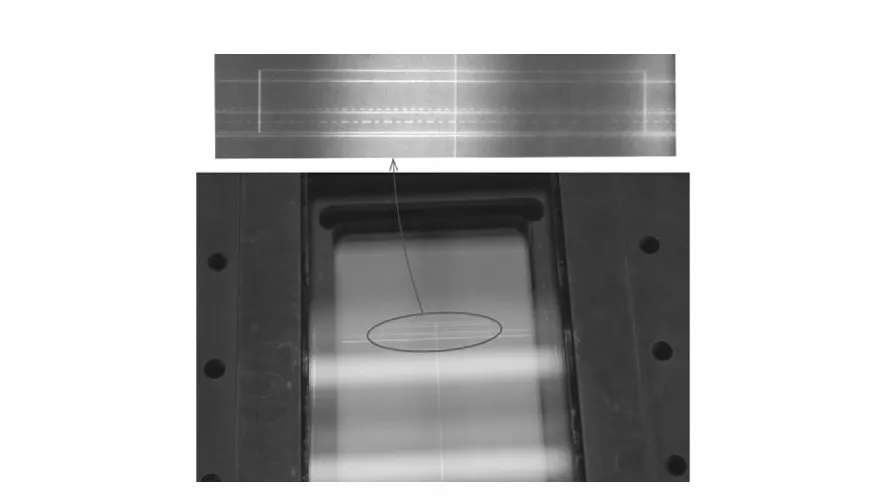
图4 等效模组分划板Fig.4 Equivalent module's reticule
3 CCD焦面定位精度分析
3.1 坐标系定义
模拟装配模组协助CCD焦面准确定位主要依靠其3个特征来实现:(1)采用工具显微镜,能够对光谱线、等效模组刻画线的纵向距离定量测量,从而计算修磨垫的理论修磨量(角度及深度);(2)采用数控加工机床实现对修磨垫的精密加工;(3)等效模组与CCD组件具有高的可互换性。
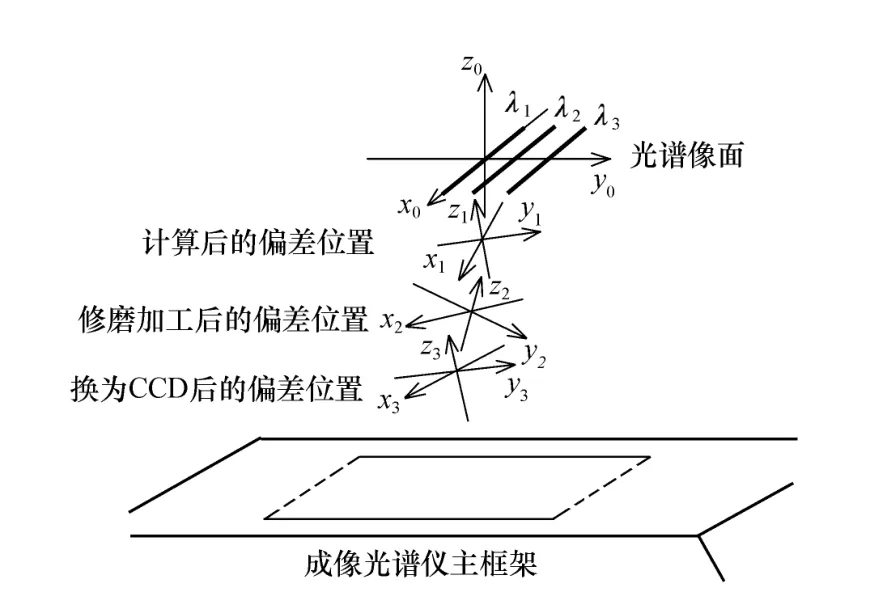
图5 坐标系定义Fig.5 Coordinates definition
然而,由于工具显微镜存在物方景深、数控机床的加工精度限制、等效模组与CCD组件的尺寸一致性误差,将模组换为CCD组件后,感光面与光谱面仍不重合。CCD焦面的最终定位精度取决于上述三环节累积误差的大小,各像元处的离焦须处于系统焦深±20 μm之内。精度分析涉及的坐标系定义如图5。x0y0:光谱像面坐标系,x0、y0分别沿着空间维、光谱维,光机装调完成之后,该坐标系与光谱仪主框架相对位置不变;x1y1为根据显微镜测量值计算修磨垫修磨量后等效模组的刻划线面,x1y1与x0y0不重合是由测量误差引起的修磨量计算误差所致;x2y2为按计算值完成修磨垫数控加工后,等效模组安装后刻划线面的位置,x2y2与x1y1不重合是加工误差所致;x3y3为用CCD组件替换等效模组后CCD感光面的等效位置,x3y3与x2y2不重合是由等效模组和CCD组件尺寸不一致性所致。最终,x0y0与x3y3平面的距离即是引入上述各种误差之后的离焦量。
3.2 修磨量计算误差
根据光学设计,400~1 000 nm光谱像面尺寸为16.0 mm(空间维)×2.0 mm(光谱维)。如图6所示,利用工具显微镜观察间隔为1.1 mm的高压汞灯404.7 nm、690.7 nm谱线,边缘视场像点A、B、C、D离焦量的测量误差分别为 zA~zD。x1y1平面方程为:

式中,a1、b1分别为平面法线的 x、y 方向余弦,z1为平面在z0上的截距,在显微镜存在测量误差的情况下,通过求解如下最小二乘问题得到系数:

式中:
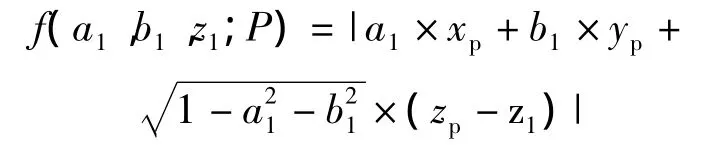
为检测点P(xp,yp,zp)与x1y1平面的距离。采用LM方法求解式(2),解的意义为显微镜存在测量误差时的最佳拟合平面。
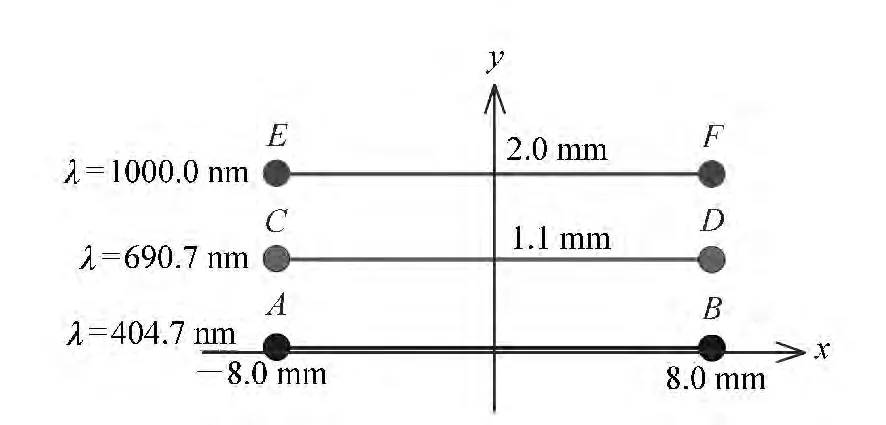
图6 A、B、C、D 是光谱像面检测点,A、B、E、F 是边角点Fig.6 A,B,C,D are Spectral image plane's test points.A,B,E and F are corner points
3.3 修磨垫的数控加工误差
数控加工机床在对垫片按照修磨量计算值进行切削时存在深度、角度误差。切削深度误差为Δz1,则:

沿着β1方向的切削角度误差为θ1,则x2y2平面法向量[a2,b2,c2]可由小量转动下的矢量转轴公式计算:

得到系数后参照式(1)得到x2y2平面方程。
3.4 等效焦面模组与 CCD组件尺寸一致性误差
由于检测、加工误差,等效焦面模组与CCD组件的厚度、倾角存在差别,将装调装置换为CCD组件时会引入额外的离焦量误差,其计算模型与数控加工误差的计算类似,用高度误差Δz2、角度误差 θ2、误差角方向 β2描述,参照式(3)、(4)、(1),计算得到 x3y3的方程:

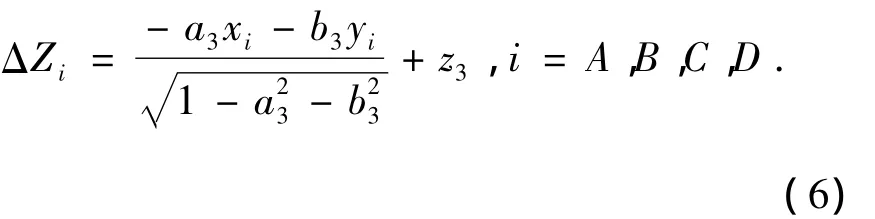
x3y3平面方程定量描述了3种误差对离焦量影响的综合效果,以光谱像面边角点A、B、E、F的离焦量ΔZi(i=A,B,E,F)可以综合反映整个像面的离焦情况:
3.5 随机试验方法误差综合结果
根据式(2)、(3)、(4)、(6)可见,误差传递过程比较复杂,难以采用误差独立作用原理进行合成,本文采用随机试验方法,将各误差项看作相互独立的随机变量,分布形式见表1。其中zA、zB、zC、zD均是工具显微镜两次读数之差,由于每次读数误差可视为误差限为[-2 μm,2 μm]且相互独立的均匀分布,故合成为三角分布。

表1 各误差项概率密度函数Tab.1 Probability density function of each error
随机试验点数选取为100 000,特征点A、B、E、F的离焦量统计见图7,误差综合后其分布接近正态分布,4个边角点离焦量误差的3σ在光学系统允许焦深之内,表明此模拟装配组件的焦面定位精度是足够的。
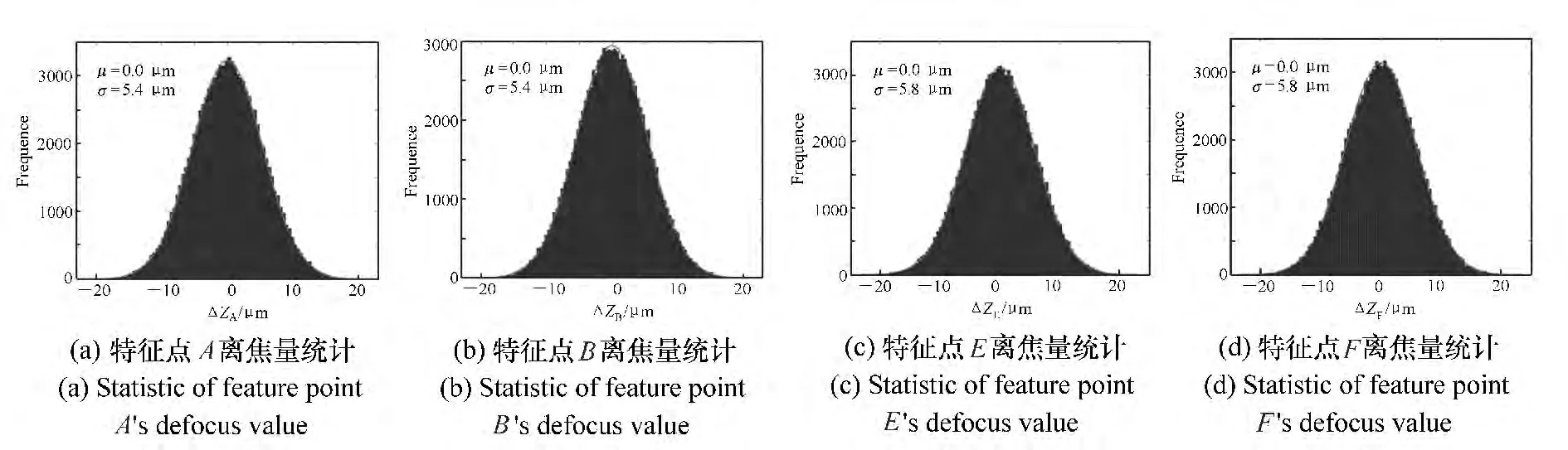
图7 光谱像面边角点离焦量统计直方图Fig.7 Statistical histogram of spectral image plane corner points'defocus value
4 实验
用工具显微镜检测404.7 nm、690.7 nm谱线上点P1~P18的离焦量和位置,结果见表2及图8。
采用式(2)的最小二乘方法对18个点做最小二乘平面拟合,得到的拟合系数为:a=-0.004 646,b=0.002 414,z0=81.9 μm,拟合残差见图9。数控机床对修模垫加工时,角度按照最佳拟合平面的法线方向给出,修磨深度给后续手工精研留有10 μm的余量。经1次机床加工、3次后续手工研磨及检测,完成了焦面的装调,见图10。以卤钨灯为光源,对鉴别率板的成像实验见图11,MTF优于0.3,满足指标。本方法减少了在装调过程中对CCD焦面组件的频繁操作,提高了装调可靠性和效率。虽然实验中对修磨量数据的测量并未针对400~1 000 nm谱段内所有谱线进行,但从实际效果来看,由于光谱像面近似为平面,仅用404.7和690.7 nm谱线的检测结果描述整个像面的离焦状态具有足够高的精度。
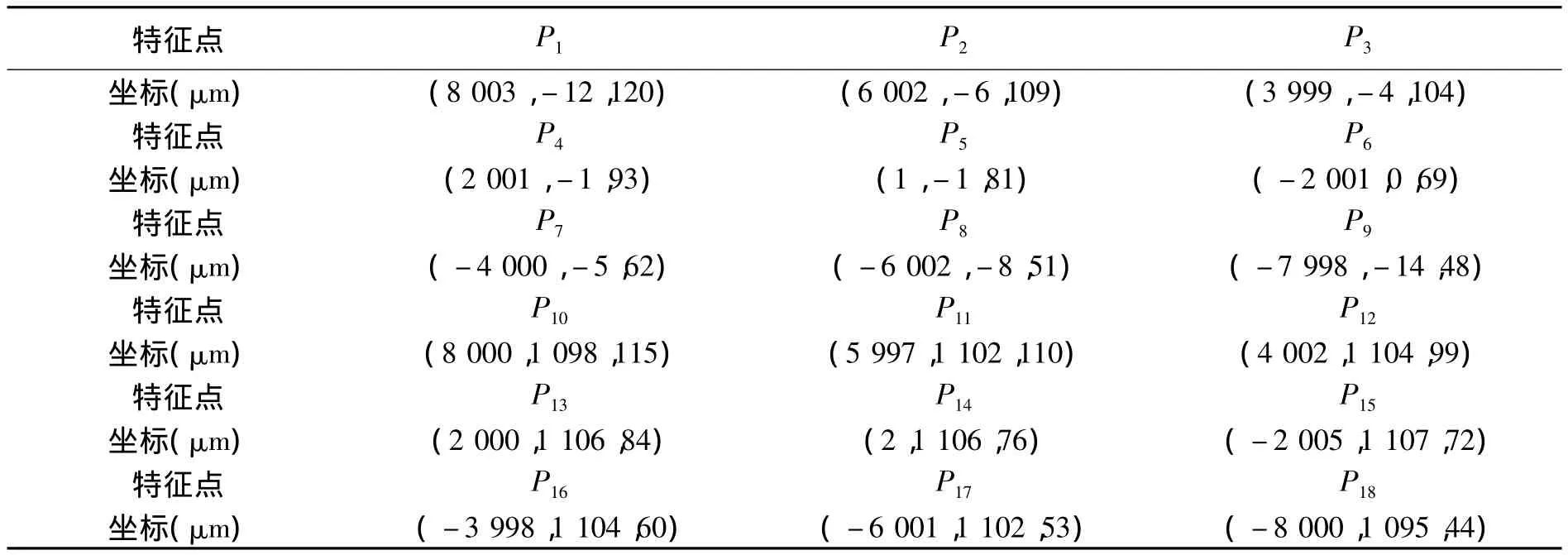
表2 特征点坐标测量值Tab.2 Measurements of feature points coordinates
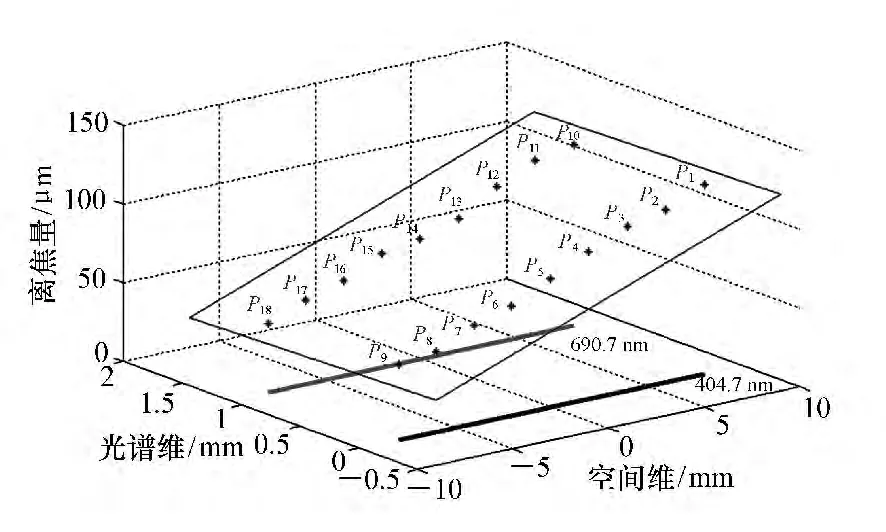
图8 用工具显微镜测量特征点坐标Fig.8 Measure feature points coordinates by microscope
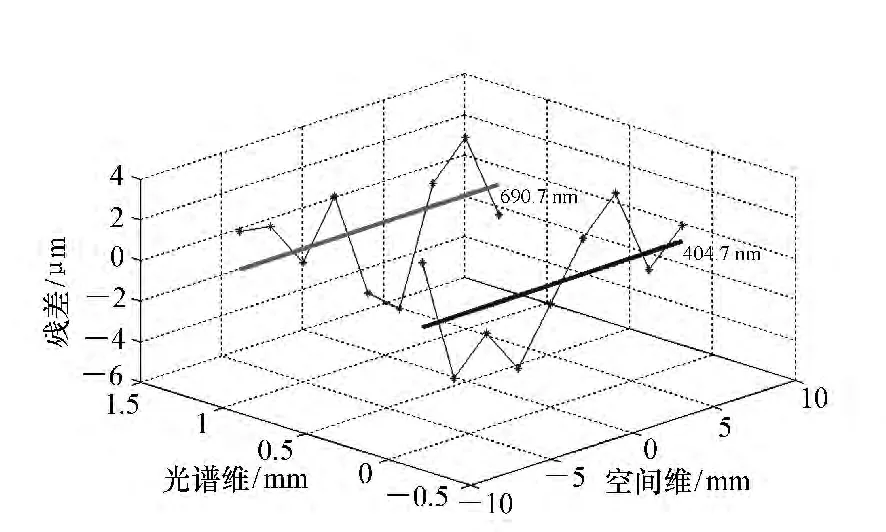
图9 最小二乘拟合残差Fig.9 Least square fitting residuals
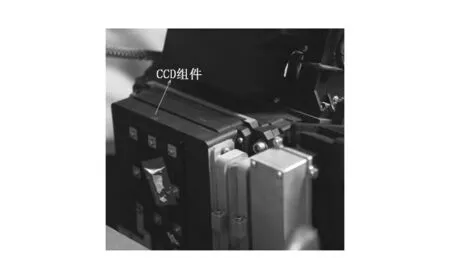
图10 CCD组件装调完成Fig.10 CCD assembly's alignment finished
图11 鉴别率成像实验Fig.11 Resolution test
5 结论
本文设计的等效焦面装调模组能够准确测量光谱像面相对于刻划平面和CCD感光面的位置,从而给出CCD组件修磨垫的修磨量;能够协助实现光谱维和空间维的对准。精度分析表明显微镜测量误差、数控机床加工误差、等效模组与CCD组件尺寸一致性误差同时存在时,仍能够满足各视场、各波长±20 μm的系统焦深要求。在实验中较快地完成了焦面装调,提高装调效率并降低损坏CCD的风险。本方法适用于多种焦面组件的装调。
[1] 吴国栋.一种三线阵测绘相机CCD像面的装调方法[J].仪器仪表学报,2009,30(11):2395-2398.WU G D.Alignment method of CCD image plane for three-line array mapping camera[J].Chinese J.Scientific Instrument,2009,30(11):2395-2398.(in Chinese)
[2] 钟兴,金光,王栋,等.CMOS星敏感器焦平面装配及标定[J].光电工程,2011,38(9):1-5.ZHONG X,JIN G,WANG D,et al..Focal plane assembly and calibrating of CMOS star sensor[J].Opto-Electronic Engi-neering,2011,38(9):1-5.(in Chinese)
[3] 赵梅.航空相机焦面位置定位量测[J].电光与控制,2010,17(4):66-68.ZHAO M.Locating of focal plane position for aerial cameras[J].Electronics Optics Control,2010,17(4):66-68.(in Chinese)
[4] 薛庆生,王淑荣,李福田,等.用于大气遥感探测的临边成像光谱仪[J].光学 精密工程,2010,18(4):823-830.XUE Q SH,WANG SH R,LI F T,et al..Limb imaging spectrometer for atmospheric remote sensing[J].Opt.Pricision Eng.,2010,18(4):823-830.(in Chinese)
[5] 张晶,王淑荣,黄煜,等.临边成像光谱仪的发展现状与进展[J].中国光学,2013,6(5):692-700.ZHANG J,WANG SH R,HUANG Y,et al..Status and development of limb imaging spectrometers[J].Chinese Optics,2013,6(5):692-700.(in Chinese)
[6] 程欣,洪永丰,张葆,等.插入Fery棱镜的小型Offner超光谱成像系统的设计[J].光学 精密工程,2010,18(8):1773-1780.CHENG X,HONG Y F,ZHANG B,et al..Design of compact Offner hyperspectral imaging system with Fery prism[J].Opt.Precision Eng.,2010,118(8):1773-1780.(in Chinese)
[7] NEVILLE R A,SUN L X,STAENZ K.Detection of spectral line curvature in imaging spectrometer data[J].SPIE,2003,5093:144-154.
[8] YOKOYA N,MIYAMURAB N,IWASAKIB A.Preprocessing of hyperspectral imagery with consideration of smile and keystone properties[J].SPIE,2010,7857:78570B1-78570B9.
[9] 张军强,颜昌翔,郑玉权,等.棱镜色散成像光谱仪的谱线漂移特性[J].光谱学与光谱分析,2011,31(12):3429-3433.ZHANG J Q,YAN CH X,ZHENG Y Q,et al..Spectral line shift property of prism dispersive imaging spectrometer[J].Spectroscopy and Spectral Analysis,2011,31(12):3429-3433.(in Chinese)
[10] 刘倩倩,郑玉权.超高分辨率光谱定标技术发展概况[J].中国光学,2012,5(6):566-577.LIU Q Q,ZHENG Y Q.Development of spectral calibration technologies with ultra-high resolutions[J].Chinese Optics,2012,5(6):566-577.(in Chinese)
[11] 金辉,姜会林,郑玉权,等.高光谱遥感器的光谱定标[J].发光学报,2013,34(2):235-239.JIN H,JIANG H L,ZHENG Y Q,et al..Spectral calibration of the hyperspectral optical remote sensor[J].Chinese J.Luminescence,2013,34(2):235-239.(in Chinese)
[12] 张春雷,向阳.超光谱成像仪图像均匀性校正[J].中国光学,2013,6(4):584-590.ZHANG CH L,XIANG Y.Correction of image uniformity for imaging spectrometer[J].Chinese Optics,2013,6(4):584-590.(in Chinese)
[13] 夏元杰,段红建,石欣,等.多视场定焦距CCD摄像系统结构设计及调校[J].应用光学,2012,33(2):240-244.XIA Y J,DUAN H J,SHI X,et al..Structure design and adjustment of multiple-field-of-view fixed-focal-length CCD camera system[J].J.Appl.Optics,2012,33(2):240-244.(in Chinese)