带噪声模拟仿真星图的实现
2014-11-26李欣璐
支 帅,张 刘,李欣璐
(1.中国科学院长春光学精密机械与物理研究所小卫星技术国家地方联合工程研究中心,吉林长春130033;2.中国科学院大学,北京100049;3.长春理工大学光电工程学院,吉林长春130022)
1 引言
星敏感器是一种通过观测恒星,利用恒星矢量实现航天器姿态测量和自主定位导航。在星敏感器投入使用之前前,必须进行地面功能测试来确认其各部分的功能。通常星敏感器地面测试方法有两种:一是地面外场观星测试[1-2];另一种是采用星模拟器进行星敏感器地面测试[3],基本方法是用星场模拟器模拟星敏感器运行过程中所拍摄的星空,星敏感器通过观测模拟的仿真星空图像,对星敏内部各部分功能及算法进行检验,进而进行导航星的识别和姿态计算。星图模拟主要根据星敏感器视轴的指向和视场范围,提取基本星表中相应恒星信息,根据星敏感器的成像原理,模拟星敏感器成像。
实际星敏感器成像受空间环境及电子器件噪声等因素的影响,同时由于光学系统存在像差和离焦,像点能量分布近似符合二维高斯分布。目前,国内外关于星图仿真的研究主要涉及仿真星图的显示方式,仿真星图刷新速度等的模拟,而关于如何模拟星敏感器对星空的真实成像,满足星敏感器星点提取、姿态解算等算法的验证的研究很少。本文对星敏感器的姿态参数进行仿真计算,实现了观测星的提取及星图仿真,在此基础上,重点对星点进行灰度弥散并对星图进行噪声等影响因素的分析,实时模拟星敏感器在轨状态下拍摄星空的真实星图,为星敏感器星点提取、星图匹配及姿态解算等算法提供测试手段。
2 观测星提取
观测星的星库应包含星的星等和方位,这些基本信息可通过星表获取。本文所采用的是SAO星表,该星表中一共包含了258997颗恒星,由于标准星表中的恒星数据量巨大,因标准星表中包含了大量仿真星图不需要的信息,而仿真星图中一般只关注恒星的星等及位置,所以在模拟星空星图时,需先对SAO星表进行处理,编辑一个子星表,然后在该子星表的基础上进行仿真模拟。本文所选用的星敏感器的视场(FOV)为14°×14°,传感器的像元为 16 μm ×16 μm,星敏感器面阵位为512×512,光轴指向赤经63°,赤纬75°,满足星等小于6大于0的所有观测星,得到以光轴为中心,视场范围内的观测星在天球坐标系下的赤经、赤纬及星等,设其赤经、赤纬为(α,δ),星等为 m。
3 坐标变换
获得观测星的的基本信息后,需对所得观测星的赤经、赤纬进行坐标变换,转换成为星敏感器上的像面坐标。按实际的坐标变换,共涉及有4个坐标系:即星敏感器坐标系、卫星本体坐标系、卫星轨道坐标系及天球坐标系,这里暂不考虑卫星轨道坐标系。由于星敏感器坐标系和卫星本体坐标系之间差一个安装矩阵,且为常量矩阵,为了便于计算,可将这两坐标系重合,只考虑星敏感器坐标系和天球坐标系之间的坐标变换。令O1-X1Y1Z1表示星敏感器坐标系,O-XYZ表示天球坐标系。地球中心与天球坐标系中心O重合,O1为星敏感器光学系统像平面中心,两坐标系的原点不同。因此由天球坐标系向星敏像平面坐标系进行变换,需先将天球坐标系平移到像平面坐标系,再将其绕坐标轴旋转实现。坐标平移对星角距的影响约为10-8,远小于星敏感器精度1个角秒,所以坐标平移所引起的误差可以忽略不计,而只考虑旋转变换。
坐标系间的相互转换可通过欧拉角(φ,θ,φ)表示。天球坐标系初始原点O与地心重合,轴OZ指向北极,轴OX指向春分点,根据右手坐标系,可确定OY轴指向。在 O和 O1重合的情况下,用O-XYZ坐标来表示O1- X1Y1Z1坐标,可表示为[5-7]:

根据321的顺序进行旋转。经过三次坐标旋转后,天球坐标系O-XYZ旋转到星敏像平面坐标系O1-X1Y1Z1的位置上。此时,OY轴对应OX1轴,OZ轴对应OY1轴,OX轴对应OZ1轴,具体旋转关系见图1。
矩阵R可由下式确定:
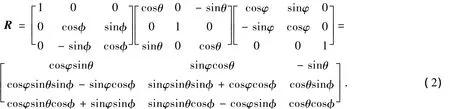
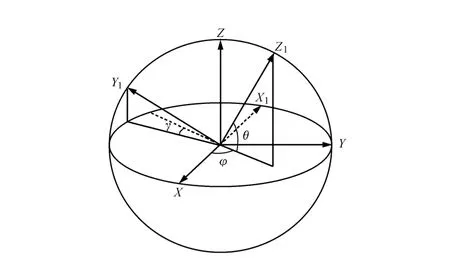
图1 天球坐标系O-XYZ和星敏感器坐标系O1-X1Y1Z1Fig.1 Celestial coordinate system O-XYZ and star sensor coordinate system O1-X1Y1Z1
假设观测星的赤经、赤纬为(α0,δ0),其中 α0∈(0°,360°),δ0∈(-90°,90°),根据直角坐标与球面坐标的关系,得到观测星在天球坐标系下的方向矢量为:

将式(2)和(3)带到式(1)中得:

将式(4)进行归一化处理,得到像平面(x,y)坐标为:
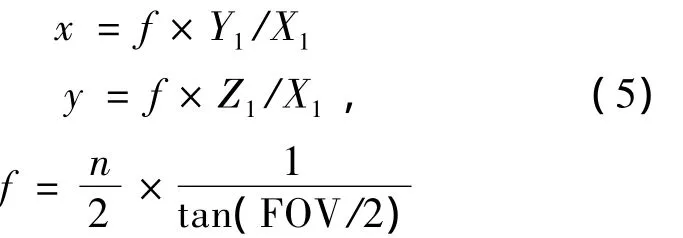
式中,(x,y)为观测星在星模拟器像平面上的坐标且x,y∈[-256 256];n为像平面上行或列的像素个数,这里取n=512;FOV为视场角大小,文中取FOV=14°。经过上面计算,完成了观测星从天球坐标系到星敏感器坐标系的转换。
4 星等变换
星等范围一般在-1~11之间,是浮点型数,但实际应用的观测星的星等一般在0~7之间。星等表征星体的亮度,天文星表中所给出的是星等具有不同的光谱型所对应的不同恒星的星等。可以认为星敏感器所见的恒星星等,与在大气层内所视的恒星星等是相同的(这里忽略了大气的影响),所以,本文观测星的模拟,是对视星等的模拟仿真。则星体亮度可用下式来表示:

式中,mi为第i颗恒星星等,Ei为第i颗星的辐射照度,E0为零等星辐射照度。
由式(6)可得,恒星每差一级,辐射照度约差2.51倍。如果模拟观测星等是从1~6,则辐射照度则大约相差100倍。本文采用的是MATLAB软件仿真平台,只支持8位,即灰度等级最多为255,因此本文采用线性星等模拟方法,星点灰度与星等的关系为[8]:

式中,gi为第i颗星的灰度值;mmax为最大星等值(6);mi为第i颗星的星等值;gmin为最大星等(6)所对应的灰度值。
根据式(7),可以得到所提取出的观测星对应的灰度值。
5 星图合成
从SAO星表中得到的观测星的赤经、赤纬及星等信息,根据星敏感器实际成像特性,设定观测星弥散的均值、方差及弥散像元个数、噪声参数,可以得到所需要的仿真星图,可表示为[9]:

式中,I(m,n)为星点的灰度分布,可用二维高斯分布函数来近似模拟;N(m,n)为背景噪声,这里设定为高斯白噪声,其均值为0,方差为σ2。
5.1 静态星像点灰度分布模型
由于星敏感器光学系统像差和离焦对成像造成影响,会使像点弥散。恒星可以看成是理想的平行光源,当其在像平面上聚焦时,成像光斑的能量分布是符合点扩展函数(PSF)的。光学成像系统的固有像差及离焦使星像点星光信号的能量分布近似符合二维高斯分布模型[11-14]。为了准确地进行星图模拟仿真,需考虑光学系统像差和离焦的影响,即观测星星像点灰度扩散问题。因此本文要将观测星星像点按二维高斯分布模型进行灰度扩散,图2为二维高斯分布模型。
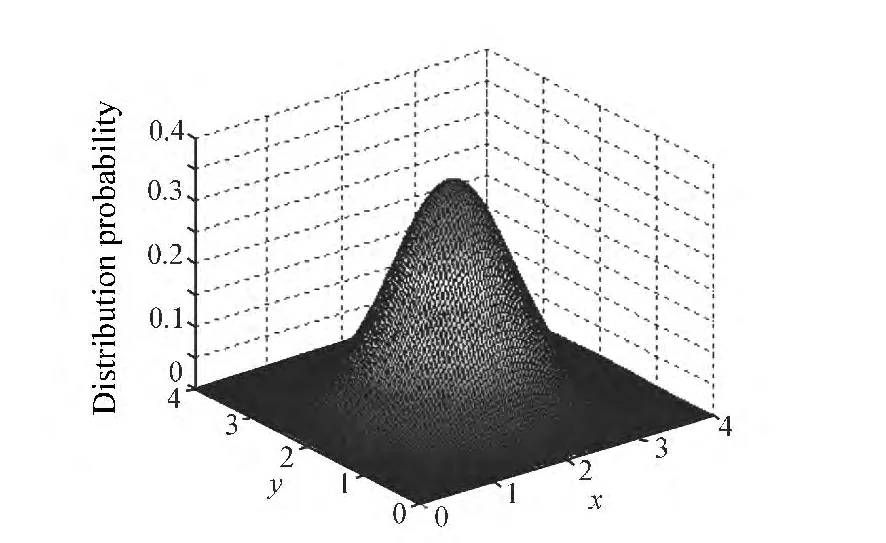
图2 二维高斯分布模型Fig.2 Two-dimensional Gaussian distribution model
二维高斯灰度扩散法中对应像点内像素(xi,yi)的灰度计算公式为[13]:
式中,(x0,y0)为高斯曲面中心位置;A为中心位置的能量灰度值,与成像点总的光照度有关;σ为所对应的像点光斑弥散半径大小,表示PSF的散焦程度;g(xi,yi)为任意像素点的灰度值。仿真计算可知,当σ=0.45时,90%以上的能量是集中在3×3的矩阵像元内,所以,本文在二维高斯分布近似中取σ=0.45。
5.2 高斯白噪声
星敏感器噪声有两大来源:一是器件本身的噪声,主要有电子器件在受到空间辐射时的散粒噪声,以及器件本身的转移噪声、输出噪声、暗电流噪声等[15];二是星空背景噪声,主要有宇宙辐射、星云、星团噪声以及杂散光等。一般情况下,宇宙辐射带来的噪声影响相对较小,而由于现代微电子工艺水平的提高及相关双采样(Correlated Double Sampling,CDS)技术的采用,转移及输出噪声可以不予以考虑;而暗电流噪声是载流子热效应产生的,散粒噪声则是光子流无规则特性产生的,相对转移噪声和输出噪声来说这两种噪声影响较大,不能忽略,均可以看成是高斯白噪声。
6 实验仿真
实验软件平台采用MATLAB R2009a版本,FOV 为14°×14°,传感器像元大小为 16 μm ×16 μm,星敏感器像面分辨率为512×512,镜头焦距f=33.36 mm,光轴指向赤经为63°,赤纬为75°,满足星等小于6的所有观测星。根据以上对模拟星图的分析,仿真主要包括3个部分:一是基本仿真星图;二是仿真星图中导航星的星点弥散;三是针对弥散后的星图进行噪声处理。
图4、图5与图3对比,本文提出的方法可以很好地对仿真星图中的观测星进行星点灰度弥散,可以更真实地进行星图仿真。
图6~图8,在不同噪声影响下的仿真星图。

图3 基本仿真星图Fig.3 Basic simulated star map
图4 星点弥散星图Fig.4 Star map of star point dispersion
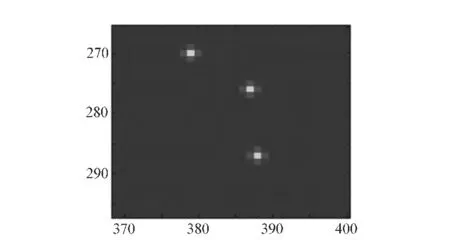
图5 星点弥散为3×3像元Fig.5 Dispersed star point of 3 ×3 pixels
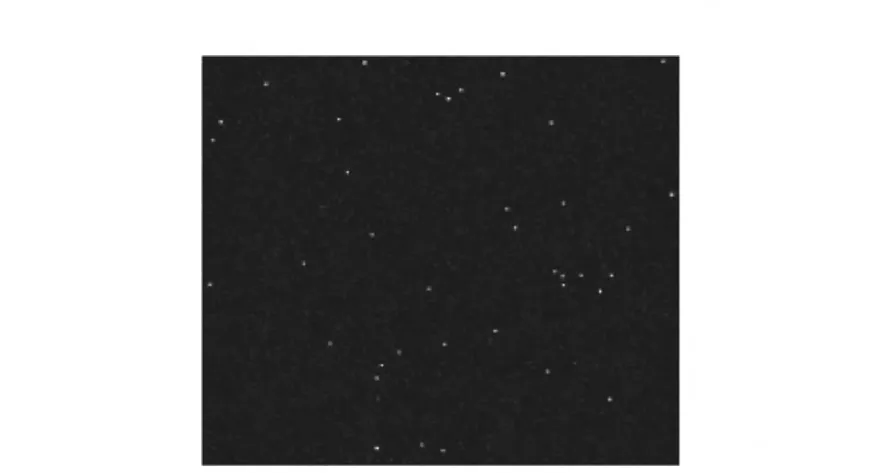
图6 加入σ=0.1的高斯白噪声Fig.6 Gaussian White noise with σ =0.1
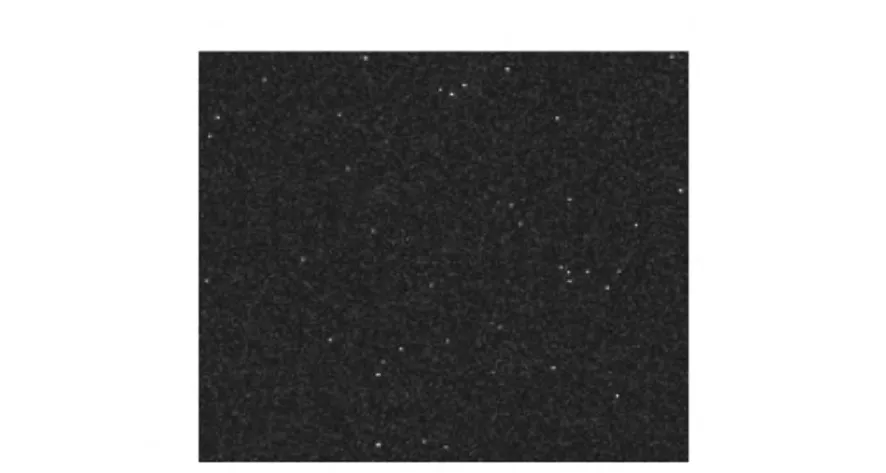
图7 加入σ=0.2的高斯白噪声Fig.7 Gaussian White noise with σ =0.2
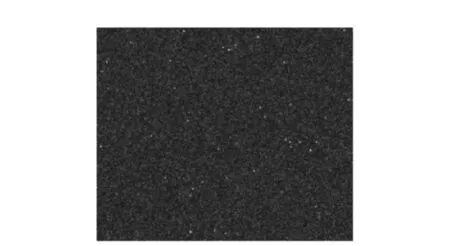
图8 加入σ=0.3的高斯白噪声Fig.8 Gaussian White noise with σ =0.3
图9是质心提取算法对仿真图形的星点进行质心计算,由图可以看出,该仿真星图能够很好地验证质心算法。
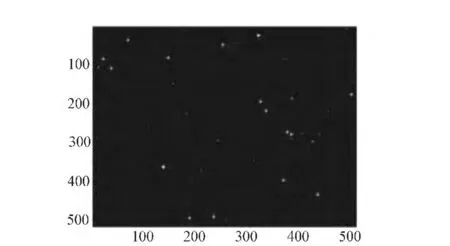
图9 质心提取仿真星图Fig.9 Simulated star map by centroid extraction method
按此星图模拟方法,对全天球随机生成1 000幅仿真星图,采用改进的三角形算法进行星图识别,统计识别成功率为99.7%,单次识别时间为4.28 ms,满足工程上星图识别的算法要求,获得较好的实验效果。
7 结论
本文利用MATLAB软件模拟了星敏感器所拍摄的星空图片,在得到观测星的在天球坐标系下的坐标、赤经、赤纬及星等的基础上,对其进行坐标转换及星等变换,得到观测星在像平面上的坐标及灰度值;重点是根据二维高斯分布模型,将星点进行灰度弥散,再通过模拟噪声,进行星图合成,得到星敏感器在轨的实时仿真星图。通过模拟的仿真星图,可以实现对星敏感器星点提取、星图识别、姿态解算等算法的全面验证与测试。本文并未对星云、星团噪声及观测星因动态问题而产生扫尾现象进行模拟仿真,接下来将对此进行进一步的研究。
[1] KLAUS A,BAUER J,KARNER K,et al..Camera calibration from a single night sky image[C].The 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition,Washington DC,United states,27 June-2 July,2004.
[2] 田宏,袁家虎,李展,等.星敏感器在地面观星实验的结果分析[J].光电工程,2001,28(5):1-4.TIAN H,YUAN J H,LI ZH,et al..Analysis for the ground observing data of star sensor[J].Optic-Electronic Engineering,2001,28(5):1-4.(in Chinese)
[3] LIU Y P,LI J,ZHANG H.Designand calibration of star simulator[J].Infrared and Laser Engineering,2006,35(Supplement):331-334.(in Chinese)
[4] 胡宜宁,巩岩.动态星图显示算法的设计与实现[J].宇航学报,2008,29(3):849-853.HU Y N,GONG Y.Design and realization of a dynamic display algorithm for star map[J].J.Astronautics,2008,29(3):849-853.(in Chinese)
[5] 徐亮,赵建科,周艳,等.弱光紫外星模拟器的研制[J].中国光学,2011,4(4):369-373.XU L,ZHAO J K,ZHOU Y,et al..Development of dim light ultraviolet star simulator[J].Chinese Optics,2011,4(4):369-373.(in Chinese)
[6] 饶才杰,房建成.一种星图模拟中观测星提取的方法[J].光学 精密工程,2004,12(2):129-135.YAO C J,FANG J CH.A way of extracting observed stars for star image simulation[J].Opt.Precision Eng.,2004,12(2):129-135.(in Chinese)
[7] 廖瑛,刘光明,文援兰.卫星星敏感器视场建模与仿真研究[J].系统仿真学报,2006,18(2):38-44.LIAO Y,LIU G M,WEN Y L.Research on modeling and simulation for view field of star sensor[J],2006,18(2):38-44.(in Chinese)
[8] COHEN M,DAVID J P.Radiation-induced dark current in CMOS active pixel sensors[J].IEEE,2000,47(6):2485-2491.
[9] 魏新国,张广军,樊巧云,等.利用仿真星图的星敏感器地面功能测试方法[J].红外与激光工程,2008,37(6):1087-1091.WEI X G,ZHANG G J,FAN Q Y,et al.Ground function test method of star sensor using simulated sky image[J].Infrared and Laser Engineering,2008,37(6):1087-1091.(in Chinese)
[10] 郭敬明,魏仲慧,何欣,等.CCD星图模拟器的设计及验证[J].中国光学与应用光学,2010,3(5):486-493.GUO J M,WEI ZH H,HE X,et al..Design of CCD star map simulator and its validation[J].Chinese J.Opt.Appl.Opt.,2010,3(5):486-493.(in Chinese)
[11] 董瑛,邢飞,尤政.基于CMOS APS的星敏感器光学系统参数确定[J].宇航学报,2004,25(6):663-668 DONG Y,XING F,YOU ZH.Determination of the optical system parameters for a CMOS APS based star sensor[J].J Austronautics,2004,25(6):663-668.(in Chinese)
[12] 王海涌,费峥红,王新龙.基于高斯分布的星像点精确模拟及质心计算[J].光学 精密工程,2009,17(7):1672-1677.WANG H Y,FEI ZH H,WANG X L.Precise simulation of star spots and centroid calculation based on Gaussian distribu-tion[J].Opt.Precision Eng.,2009,17(7):1672-1677.(in Chinese)
[13] 王海涌,周文睿,林浩宇,等.静态像点高斯灰度扩散模型参数估计方法[J].光学学报,2012,32(3):0323004.WANG H Y,ZHOU W R,LIN H Y,et al..Parameter estimation of gaussian gray diffusion model of static image spot[J].Acta Optical Sigica,2012,32(3):0323004.(in Chinese)
[14] HANCOCK B,STIRBL R,CUNNINGHAM T,et al..CMOS active pixel sensor specific performance effects on star tracker/imager position accuracy[J].SPIE,2001,4284:43-53.
[15] COHEN M,DAVID J P.Radiation-induced dark current in CMOS active pixel sensors[J].IEEE,2000,47(6):2485-2491.