基于LabVIEW的水轮机同步顶升系统的模糊PID控制
2014-11-25郝用兴胡冬松王超峰李厚琨
郝用兴,胡冬松,王超峰,李厚琨
(华北水利水电大学,河南 郑州450045)
转子静平衡是水轮机制造检修过程的重要组成部分,通过静平衡可以消除转轮质量不平衡产生的不平衡力矩.同步顶升系统作为静平衡装置的重要子系统,其作用在于使静平衡设备安全准确升起和降落.目前,在重型机械的安装工程中多数使用液压同步系统.因为油液的泄漏、压缩、阻尼等原因,特别在载荷不断变化和运动行程长的情况下,实现多缸同步难度大[1].所以对液压同步系统的设计方案和控制策略的研究具有重要的实际意义.
电和液比例同步技术在液压同步系统中应用广泛,比伺服同步系统价格低廉,抗污染能力强,能耗低.文中提出使用电液比例技术的水轮机同步顶升系统,建立各部分的数学模型,并使用LabVIEW 提供的模糊逻辑工具箱设计合理的控制策略.
1 电液比例同步系统的组成和工作原理
图1为同步顶升系统的液压原理图,系统采用主从式跟踪控制各缸的位移[2]. 以一个缸为主动缸,其位移作为从动缸的位移标准,4 个缸均采用闭环控制.由计算机给主动缸的电液比例阀输入位移信号.另外3 个从动缸的位移传感器动态检测位移状态,并与主动缸的位移比较.通过比较误差改变比例换向阀的阀口开度,从而提高或降低每缸的流量以实现4 缸同步升起和降落.

图1 同步顶升液压回路图
2 系统数学模型
2.1 功率放大器的传递函数
由于功率放大器的动态性能高,为简化模型,将其视为比例环节,传递函数为

2.2 电液比例换向阀传递函数
电液比例阀以电信号为输入,阀芯的位移为输出.比例阀的数学模型为

式中:KXV为阀芯的电压-位移增益;ξ 为阻尼比;ωn为比例阀的固有频率.
2.3 阀控液压缸的传递函数
考虑动力元件主要承受惯性负载,忽略弹性负载和干扰力的影响,得到阀控液压缸的活塞对阀芯的传递函数为

式中:Ap为负载流量等效面积;Kq为流量增益;ωh为液压固有频率;ξh为液压阻尼比.
2.4 单缸顶升系统传递函数及其参数的确定
由各动力元件的传递函数得到单缸顶升50 t 系统开环传递函数为

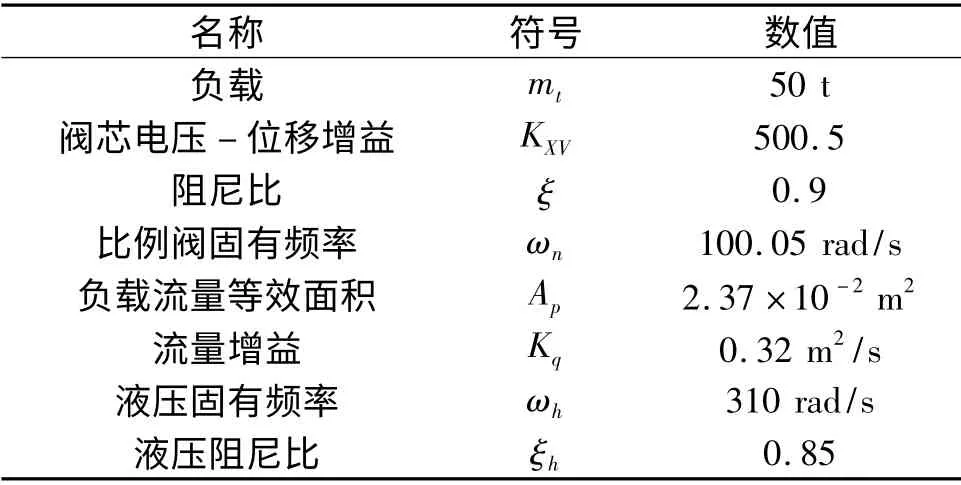
表1 系统参数
3 自适应模糊PID 控制
由于同步顶升系统是一个时变性、非线性系统,受环境因素影响,传统PID 控制无法达到满意的控制结果.模糊控制具有易于实现、鲁棒性好、响应快等优点,所以把模糊控制与PID 控制结合起来,提高系统的控制效果.
控制系统如图2所示. 图中r 为标准液压缸的位移,y 为跟随液压缸的位移,二者偏差为e,偏差变化率为ec.通过模糊控制规则对PID 参数进行在线修改,从而满足不同时刻系统对PID 参数的要求.
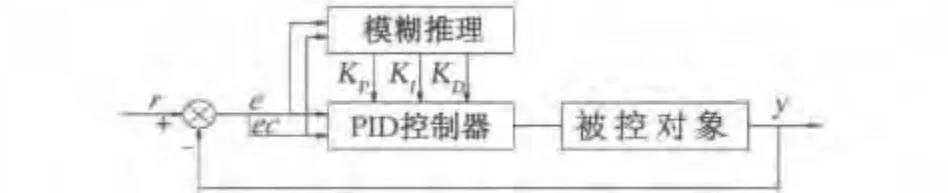
图2 自适应模糊PID 控制器结构
控制器输入变量e 和ec 模糊状态论域为[-6,6],输出变量u 的模糊论域为[0,6].语言变量选取为[PB,PM,PS,ZO,NS,NB,NM],分别代表正大、正中、正小、零、负小、负中、负大.从系统的响应速度、超调量、稳定性等方面分析,结合实际操作经验,建立模糊控制规则[4-5].以KI为例,具体见表2.

表2 KI 的模糊规则表
4 基于LabVIEW 的模糊PID 控制器设计
NI 公司的PID and Fuzzy Logic Tookit 工具包将建立模糊系统所需的工具整合在一起[6]. 由于每个控制器只有一个输出,因此需要3 个控制器分别控制KP,KI,KD. 每条规则的模糊推理算法为maximum,解模糊使用最大隶属度法,加权值为1. 每个变量的隶属度函数均为三角函数,函数曲线的表达式为
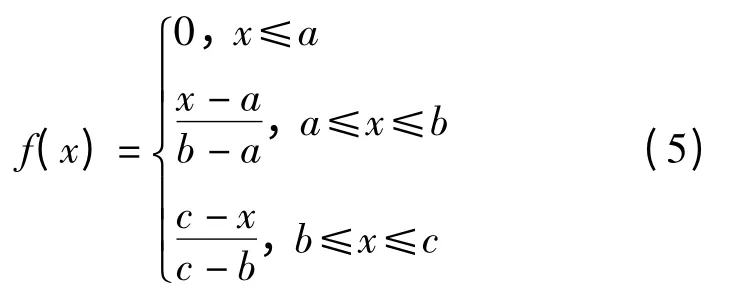
式中a,b,c 分别为三角形的3 个顶点.
把设计好的模糊控制器用vi 载入程序框图中,如图3所示.KP的初始值为3.000 5,e 和ec 的量化因子均取经验值为3.KI的初始值为0.000 5,e 和ec的量化因子均取经验值为60.KD的初始值为2,e 和ec 的量化因子均取经验值为3.KP的比例因子为6,KI的比例因子为6,KD的比例因子为40.
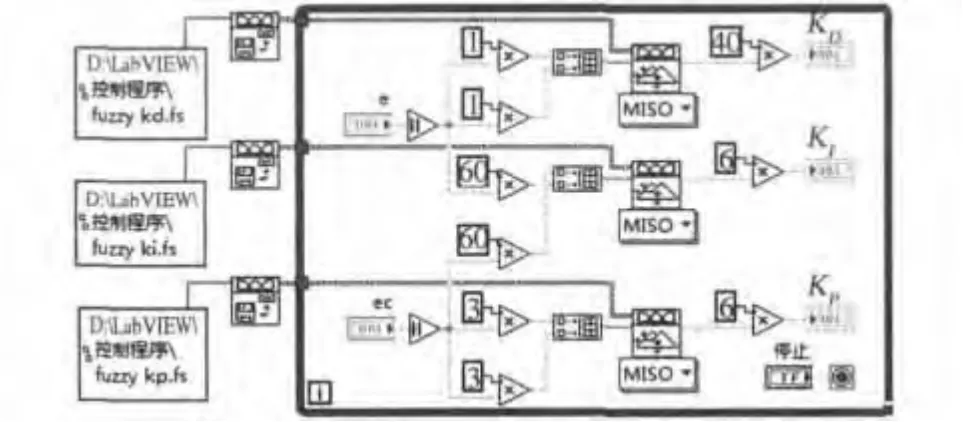
图3 模糊控制器程序框图
5 同步顶升系统的仿真
在LabVIEW 下设计用户前面板和后台程序,利用LabVIEW 强大的信号处理功能,分别测试同步顶升系统在无控制器、常规PID、模糊PID 情况下的阶跃响应,如图4所示[7].
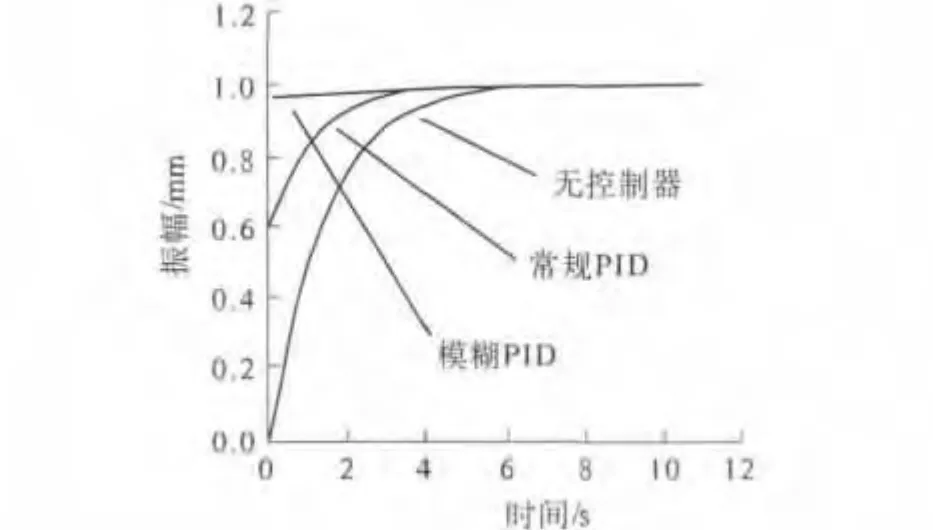
图4 系统阶跃响应曲线
从图4看出,系统的响应快,超调小,很快达到稳定,比常规PID 的控制效果好.
6 结 语
在LabVIEW 环境下,使用PID and Fuzzy Logic Tookit 工具箱设计自适应模糊PID 控制器,并将其应用到同步顶升系统中. 仿真结果表明,基于Lab-VIEW 的控制器响应迅速且过程平稳.
[1]余顺周,张宏志,姚英学,等.水轮机静平衡中四缸同步系统的研制[J].液压与气动,2004(5):47-49.
[2]张绍九.液压同步系统[M].1 版. 北京:化学工业出版社,2010.
[3]邢印姣.电液比例同步控制系统[D].南京:南京航空航天大学,2005.
[4]何春华,蔡志岗. 基于LabVIEW 的模糊PID 控制系统[J].仪表技术,2010(7):57-62.
[5]张永胜,高宏立,刘庆杰.基于LabVIEW 的模糊控制系统设计[J].仪表技术与传感器,2012(3):27-29.
[6]Jeffrey Travis,Kring J.LabVIEW for Everyone[M].3 版.乔瑞萍,译.北京:电子工业出版社,2008.
[7]庄昌源.基于虚拟仪器的模糊PID 控制系统设计[D].南京:南京理工大学,2007.
