全路面起重机转向特性的分析研究
2014-11-24宋志强史青录陈贯祥梁培根
宋志强,史青录,陈贯祥,梁培根,邵 波
(太原科技大学 机械工程学院,山西 太原 030024)
随着经济的发展和社会的进步,全路面起重机越来越多地应用于各种工程吊装领域。全路面起重机的每个车轮都可以根据实际工况参与转向,通过调整其转向时的重心侧偏角和横摆角速度,进而改善车辆的转向稳定性。低速时,全轮参与转向能够减小转弯半径而增加车辆的灵活性;其还具有爬坡能力强及蟹行转向的能力,使车辆迅速地离开或靠近作业区,提高了车辆的机动性。但随着底盘轴数的增加,全路面起重机在高速行驶的工况下操纵稳定性难以控制[1]。
本文以某七轴全路面起重机为研究对象,建立多轴全轮转向的二自由度动力学模型,在保证车辆转向过程中具有质心侧偏角为零的稳定性基础上,对其转向特性进行分析。
1 转向特性的动力学简化模型
坐标系定义如下:车辆行驶的方向为x轴正方向,垂直车身指向左侧为y轴正方向,垂直地面向上方向为轴正方向。根据汽车理论[2]及相关文献[3],将全路面起重机简化为线性二自由度模型如图1所示。
根据汽车理论得全路面起重机的动力学方程为
图1 转向动力学模型
式中 u、v—— 分别为车辆质心处的速度在x、y轴上的分量(m/s);
M——车辆总体质量(kg);
I——车辆绕轴转动惯量(kg·m2);
ki——第i轴的综合侧偏刚度(N/rad);
di——第i轴车轮转角(rad);
ωr——车辆绕轴转动角速度(rad/s);
Li—— 车辆质心到第i轴轴线的距离(第i轴在车辆质心的前方取为正,第i轴在质心的后方取为负)(m);
kpi—— 第i轴与第一轴车轮转角之比。
2 转向特性的数学模型
为保证全路面起重机转向过程中具有稳定性和平顺性,采用质心侧偏角β为零的控制目标,这时质心侧偏角加速度β·、横摆角加速度ω·
及侧向加速度v·
均为零[3],则由式(1)得
根据克莱姆法则得
式中 li—— 车辆转向中心在车身上的投影点到第i轴轴线中点的距离(m),正负方向同 Li,li=Li-Δ。
Δ—— 车辆转向中心在车身上的投影点O到质心的距离(m)。
为保证车辆转向时各车轮做纯滚动运动,根据阿克曼定律得各轴车轮与第一轴车轮转角之比
3 实例分析研究
以某七轴全路面起重机为例,对其转向特性进行仿真分析,其主要技术参数[1]如表1。
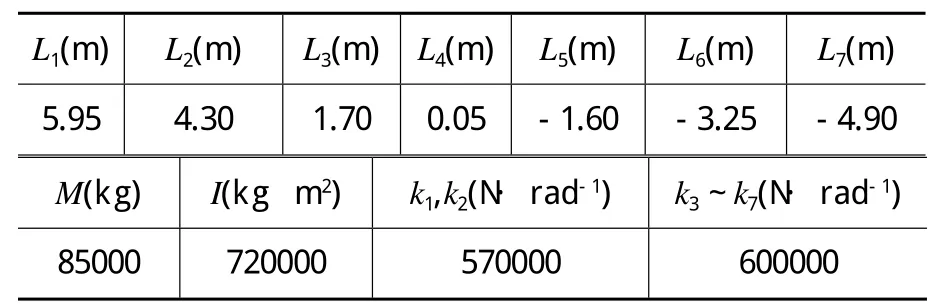
表1 研究对象主要技术参数
对式(5)通过运用Matlab软件编程[4~6]得到图2。由图2可知,在转向过程中,转向中心随着车辆速度的提高而向后移动(图2中负数只表示向后的方向),其到车辆质心的距离不断增大,使全路面起重机在高速行驶状态下不易产生甩尾现象。对式(7)仿真得到图3曲线,由图3可知,在保证车辆转向时的质心侧偏角为零时,转向中心到第一轴的距离随着速度的提高而增大,即转向中心到质心的距离随车速的提高而增大。所以,从2个角度都得出了同样的转向特性。
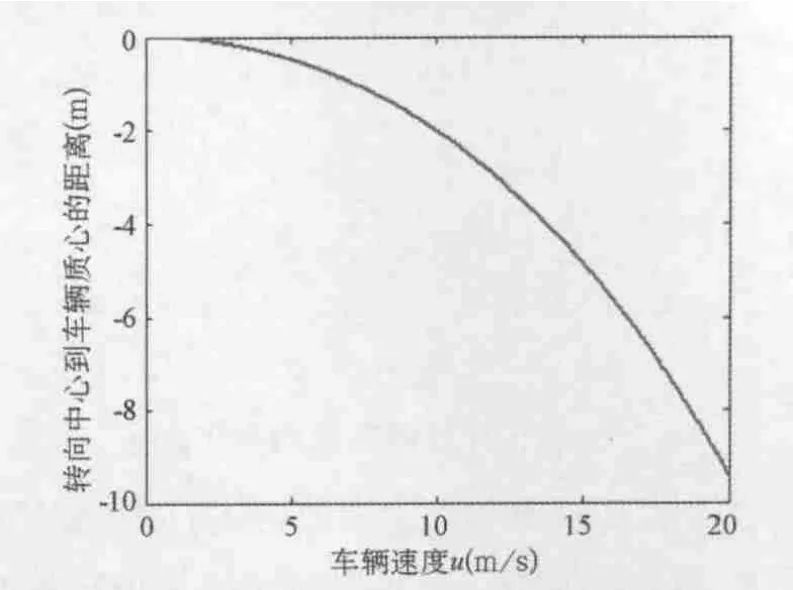
图2 转向中心到质心的距离随车速变化曲线
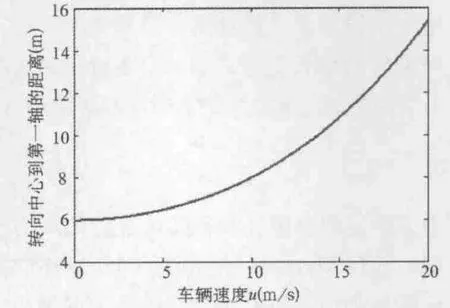
图3 转向中心到第一轴的距离随车速的变化曲线
对式(6)运用Matlab软件编程得到图4。由图4可知,车速较低时,第二、三、四轴与第一轴的车轮旋转方向一致,第五、六、七轴转向与第一轴的车轮转向相反,这样的转向方式可以使车辆转弯时具有最小转弯半径,提高其灵活性;随着车速的提高,各轴的车轮旋转方向趋于一致,又可以使车辆具有稳定性。
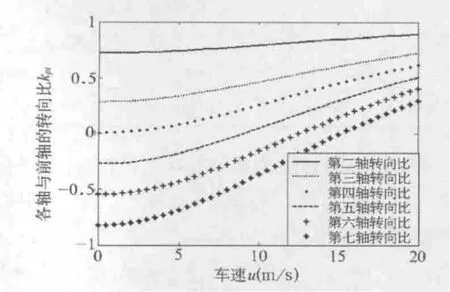
图4 随车速变化各轴与第一轴的转向比的曲线
对式(8)运用Matlab软件编程得图5,由图5可知,在车轮转角一定时,车辆转向半径随速度的提高而增大。
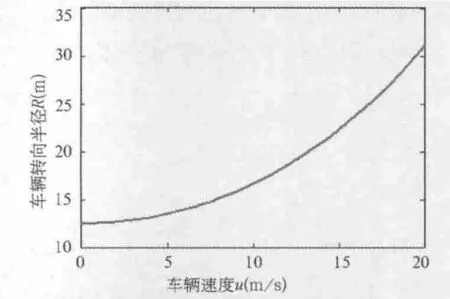
图5 转向半径随车速的变化曲线
在Matlab/simulink中依据式(1)建立如图6所示的动力学模型,并采用零质心侧偏角控制策略得到图7所示的结果。图7表明:全路面起重机在角阶跃输入下,经过稍许的调整时间后,其质心侧偏角的稳态值趋于零,但随着车速的增加其质心侧偏角的超调量和调节时间都逐渐增加。
4 结 语
本文通过建立多轴车辆转向过程的动力学简化模型,运用Matlab/Simulink对全路面起重机的转向特性进行了仿真研究,验证了采用质心零侧偏角控制策略能很好地改善车辆转向过程中的稳定性,为之后进一步深入研究全路面起重机的转向特性奠定了基础。
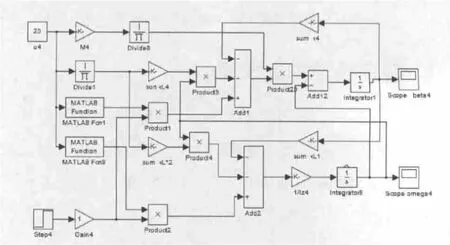
图6 转向动力学模型
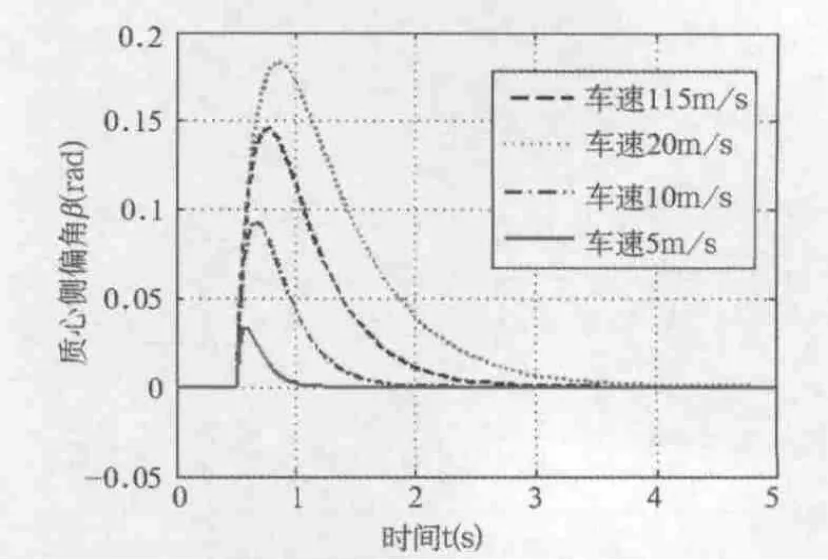
图7 质心侧偏角单位阶跃响应曲线
[1] 张小江.全地面起重机转向性能仿真和试验研究[D].长春:吉林大学,2011.
[2] 余志生.汽车理论(第4版)[M].北京:机械工业出版社,2008.
[3] 胡敏杰.全地面起重机多桥转向系统模糊PID控制研究[D].秦皇岛:燕山大学,2012.
[4] 周富家.多轮转向全路面车辆操纵稳定性控制算法研究[D].长春:吉林大学,2007.
[5] 韩汪利.多轴车辆转向控制系统设计及仿真[D].长沙:湖南大学,2011.
[6] 张小江,高秀华,赵建国,等.多轴转向车辆零侧偏角控制策略研究[J].农业装备与车辆工程,2008,(6):13-15.
