在轨服务中非合作目标空间圆检测方法研究
2014-11-20黄建明魏祥泉靳永强
刘 玉,陈 凤,黄建明,魏祥泉,靳永强
(上海宇航系统工程研究所,上海201108)
1 引言
随着空间技术的发展,各类航天器的构造越来越复杂,造价也越来越昂贵。为节省航天任务费用、延长航天器工作寿命、提高灵活执行多种任务的能力,在轨服务技术日益得到重视。目前,航天器、太空碎片等都是非合作目标,即没有安装用于测量的合作标志器和便于抓捕的手柄等,对此类非合作航天器在轨服务已成为近年来的研究热点。
在轨服务飞行器(On-orbit Service Vehicle,OSV)是一种新概念的智能航天器,专用于对服务对象实施在轨服务,是自主式在轨服务系统的核心[1]。在轨服务(On-Orbit Servicing)是指针对在轨运行的航天器进行的各类空间操作[2-3],在轨服务飞行器作为未来的新型航天器,主要完成空间在轨服务任务。目前,空间在轨服务任务主要包括在轨维修、在轨组装、在轨救援、在轨加注、在轨探测与检测、空间碎片清理、废弃卫星拖曳等。为实现航天器的自主在轨服务,必须首先实现两航天器的安全可靠对接,即实现自主交会对接技术(RVD)。目前,国内外在轨服务的成功案例大都是针对合作目标的空间任务,即被服务航天器经过特殊设计以配合完成在轨服务任务,而目前各国实际在轨运行的航天器和在研型号,并没有专门设计用于接受在轨服务的抓捕手柄和测量标志器,即为非合作目标[4]。基于合作目标的在轨服务技术[5]无法适用于此类目标,因此,基于非合作目标的交会对接技术是目前迫切需要解决的关键技术之一。
根据对目前在轨航天器的调研,空间非合作目标中可供识别和抓捕的部位主要包括星箭对接环、远地点发动机喷管、太阳帆板、对地通信天线支架等[4]。星箭对接环、发送机喷管等具有较为明显的空间圆特征,相对较容易识别,也较为容易抓捕,因此,本文主要对该类目标进行研究;空间圆检测技术是实现空间非合作目标空间圆位置姿态测量技术的关键,为此,本文研究了一种非合作目标空间圆检测方法,通过Canny算子检测边缘、Freeman链码法对边缘进行提取分类以及再利用RED算法进行非合作目标空间圆检测,和传统的RED算法相比,本文研究的算法在保证检测精度的前提下,明显降低了算法的耗时量。
2 非合作目标空间圆检测技术在在轨服务中的应用
近些年来,随着航天技术的不断发展,越来越多的航天器被发射入轨,空间逐步成为一个相当拥挤的场所,空间各个轨道上都会残留大量的太空碎片和失效卫星,因此,各航天大国都迫切希望发射在轨服务航天器,实现与在轨卫星交会对接(RVD),对在轨卫星提供在轨维修服务以延长在轨运行时间[3]。由于几乎所有卫星上都有星箭对接环,如图1所示,因此,可将该接口部分作为识别和抓捕部位进行研究。此外,地球静止轨道失效卫星长期占据轨道资源,其累积效应使得GEO轨道资源日益紧张。因此,捕获并恰当处理这些成为太空垃圾的GEO失效卫星对可持续利用空间资源具有重要的意义和必要性[6]。发动机喷管形状特殊,图2为示意图,可作为在轨捕获对象,利用抓捕装置对其进行抓捕,抓捕后与整个目标形成组合体,通过拖曳等方式使其离轨。于此同时,远地点发动机喷管还可用于在轨加注,为轨道飞行器延长寿命提供依据。

图1 星箭对接环示意图Fig.1 The docking ring of satellite and rocket

图2 发动机喷管示意图Fig.2 The engine nozzle on satellite
目前,国外已经开展了很多应用到识别发动机喷管或者星箭对接环的在轨服务系统,而国内目前还处于理论研究阶段。下面针对国外典型的应用进行介绍。
2.1 UHF-1卫星在轨服务技术
UHF-1卫星[7]非常昂贵,其研发费用就接近20亿美元,若在GTO轨道发生故障而无法按照要求进入静止轨道,则会造成巨大经济损失。为实现UHF-1卫星在轨服务,David R等人[8]提出在GTO轨道实现UHF-1卫星的交会对接,并通过服务系统的轨道机动实现将目标卫星送入静止轨道,并由辅助系统对UHF-1进行轨道控制。
UHF-1卫星的在轨服务延寿系统交会对接机构方案如图3和图4所示[7]。图4中的34(a)为导向椎,捕获过程中该部分将进入远地点发动机尾喷管内,并引导34(b)所示机构包络识别并捕获卫星的星箭对接环,最终使两航天器构成组合体。
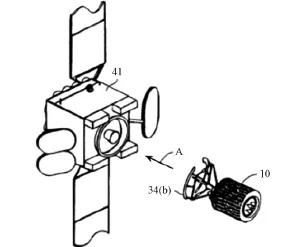
图3 UHF在轨服务系统方案Fig.3 On orbit service project for UHF

图4 UHF在轨服务系统对接机构Fig.4 Capture tool for UHF on orbit service system
2.2 MDA公司在轨延寿技术
MDA公司提出利用空间机械臂实现对寿命末期卫星开展燃料在轨加注延寿。图5所示为该公司研制的在轨延寿系统[7]。空间机械臂系统首先检测识别并抓捕到目标卫星远地点发动机喷管,然后通过一定的方式打开目标卫星注排阀门,最后插入软管泵入适量燃料。
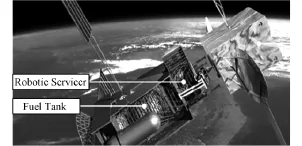
图5 MDA公司的在轨延寿系统Fig.5 Life time extension system of MDA corporation
2.3 CX-OLEV在轨服务系统
CX-OLEV在轨服务系统由欧洲的ORC公司提出,并由荷兰航天公司和德国宇航中心(DLR)进行联合研制[9]。该系统构型及抓捕机构如图6所示[7]。OLEV航天器充分利用了静止轨道卫星远地点发动机喷管和星箭对接环的结构特点,设计了通用型对接机构[10],主要包括远地点发动机喷嘴的对接装置和星箭对接环锁紧装置组成。如图7所示[7]为卫星捕获机构实验,在近距离识别出发动机喷管后,系统沿发动机喷嘴轴线方向靠近目标,丝杠机构沿轴线方向伸展并伸入发动机喷管,随后膨胀结构展开并实现与目标星连接;当捕获机构将两航天器拉近至锁紧机构的作业范围之内时,一旦识别到星箭对接环,锁紧机构便打开并捕获,然后分别从对接环内部和外部收紧,两星之间的相对位姿即被确定。
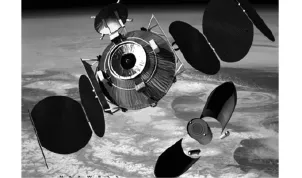
图6 CX-OLEV系统Fig.6 CX-OLEV system

图7 卫星捕获机构实验Fig.7 Test of satellite capture tool
3 非合作目标空间圆检测方法
非合作目标空间圆的圆形特征是二次曲线特征的一个特例,因为它在任意方向上的透视投影都是一个椭圆,从数字图像中成功识别椭圆对非合作目标空间圆的定位非常重要,因此,研究非合作目标空间圆检测方法本质是研究椭圆检测方法[11]。
目前关于椭圆检测方法大致分为投票和最优化两大类。标准Hough变换(SHT)是一种基于投票思想实现椭圆检测的方法。该法通过在参数空间检测峰值获得最优椭圆参数,因此,存在存储空间大、计算复杂度大等问题[12]。最优化方法则主要包括最小二乘拟合、遗传算法等。在该类方法中,最典型的当属Li等[13-14]提出的随机椭圆检测(RED)方法,它将最小二乘法与随机Hough变化结合实现对椭圆最优拟合,该法无需大量内存空间,对噪声不敏感,但存在过于依赖参数阈值和无效采样问题。为减少无效采样,本文提出一种改进RED方法,首先进行边缘检测,通过Canny算子对边缘进行初步检测,采用Freeman链码法对边缘进行提取分类,得到独立的边缘,然后对每个边缘再利用RED算法进行检测,这样能明显减少随机选择的边缘点数落在不同椭圆上的概率,从而提高检测椭圆的效率,减少算法的耗时量。
3.1 边缘检测
目前,边缘检测方法有很多,其中Canny算法[15]具有精确定位,抗噪能力强的优势,因此本文主要采用该法实现边缘检测。Canny算子提取边缘信息主要包括以下几个步骤:①利用高斯平滑滤波器来平滑图像以除去噪声;②采用一阶偏导的有限差分计算梯度的幅值和方向;③对梯度幅值进行非极大值抑制;④采用双阈值法检测和连接边缘。
为实现有效的椭圆拟合,需要将边缘检测结果进行分类,同时进行边缘点序列化处理。由于Freeman链码法[16]具有原理简单、耗时量少等优势,因此,本文主要采用该法实现边缘分类与序列化处理。根据二维线条的不同走势方向,分别用{0,1,… ,7}8个标志分别表示八邻域像素,一个连续的平面线条图像都可以用一串由{0,1,… ,7}中的元素组成的链码来近似描述。图8(a)所示为八方向链码。针对一个闭合区域,从某个起点开始,将边界的走向按Freeman链码的编码方式记录下来,可形成连续的序列即为边界链码,即实现独立边缘的分类,图8(b)为一边界链码示例,链码序列010707645443422组成一个边缘链码,用离散化的点序列进行表示。

图8 Freeman链码示意图Fig.8 The schematic diagram of Freeman chain
由于边缘点序列化后,表征同一边缘的边缘点分布十分密集,会明显增加后续椭圆拟合的耗时量,因此,提出边缘点间距约束准则,去掉过于密集的边缘点。
假设 {p1,p2,p3,……,pn-1,pn} 为边缘点集合,设两个边缘点之间的最小约束距离为dmin,约束准则为:遍历边缘点序列,若两个边缘点之间距离小于dmin,则去掉其中对应点处梯度值较小的边缘点,在一定程度上减少了椭圆拟合耗时量,同时不影响拟合精度。一般情况下,dmin取为2。
3.2 椭圆检测
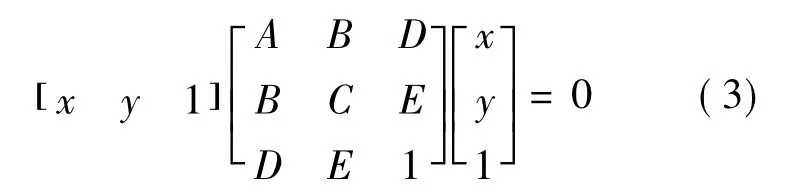
椭圆的一般方程可写为如式(1)所示形式。

(1)式中,A、B、C、D、E 为待定参数,边缘点(u,v)到椭圆边界的代数距离可用公式(2)表示:

上式写成矩阵形式为式(3)。
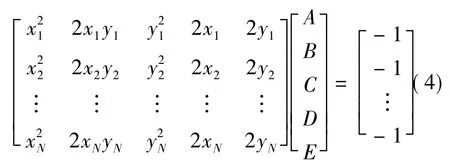
采用最小二乘法进行拟合椭圆,假设( xi,yi),i=1,…,N为椭圆上的数据点,椭圆拟合即估计椭圆方程中的各个参数。于是有公式(4),通过非线性最小二乘法即可解算出未知参数 A、B、C、D、E。
RED算法主要通过随机选取3个边缘点,并确保三个边缘点间距离大于阈值Ta,然后分别以这三边缘点为中心,定义一定大小邻域,将这三个邻域中所有边缘点用于最小二乘拟合得到椭圆参数,然后通过选取第4个边缘点来计算该点到椭圆边界的代数距离D,若符合阈值要求,则继续判断剩余点集合中每个边缘点到椭圆边界的距离,统计符合距离阈值要求的点数记为n,则判断n与拟合椭圆的周长的比值是否符合残缺率阈值要求,若符合,则认为是真实存在的一个椭圆,否则,重新随机选取边缘点拟合椭圆[13-14]。
整个算法的具体步骤如下:
1)初始化 Tt,Tem,Ta,Td,Tt为最大迭代次数,Tem为椭圆残缺率,Ta为随机选取边缘点间最小距离Td为边缘点到椭圆边界最大距离。设初始迭代次数F=0,并统计总边缘点数为N0,边缘点集合记为V。
2)从V中随机选符合Ta约束的三个边缘点,并以三点为中心,定义相同邻域窗口,用最小二乘法将窗口内所有边缘点拟合椭圆,记为E。随机选第四点,计算边界距离,若D >Td则转向(7),否则执行(3)。
3)统计V中满足到E边界距离点数为N1,这些点集合记为V1,若N1≥Tr*C,其中C为可能椭圆周长,则转向(4),否则转向(5)。
4)可能存在的椭圆E被证实是真实存在的一个椭圆,保存椭圆参数信息,并将剩余特征点集合修改为V=V-V1,重置迭代次数F=0,并转向(2)。
5)F=F+1,且统计集合V中剩余边缘点数记为N,若F≥Tt或N/N0≤Tem,则结束算法,否则转向(2)。
3.3 算法流程
一般情况下,通过摄像机成像得到的图像都存在一定的噪声,因此,在进行椭圆检测算法之前,需要对源图像进行预处理,主要进行一些滤波算法,去掉高斯噪声等影响。图9为本文改进的RED椭圆检测算法的主要流程。首先,通过边缘检测和分类,得到多个边缘;然后,分别对每个边缘采用RED算法进行椭圆拟合;最后,分别显示最终拟合好的椭圆信息。

图9 本文改进RED椭圆检测算法流程Fig.9 The process of the improved RED algorithm
4 仿真与分析
本文描述的算法的仿真结果均在配置为Intel(R)Core(TM)2 Duo CPU,2.99 GHz,内存为1.98 GB的PC机上运行所得。操作系统为Windows XP,开发平台为VC++6.0。
图10为边缘检测过程,(a)为原图,(b)为Canny算子检测边缘结果,边缘由非常密集点组成;(c)为利用Freeman链码法得到边缘分类结果,并通过边缘点间距约束去掉过于密集边缘点,如图所示,总共得到6个独立边缘,分别用离散化的序列点进行表征,边缘检测结果为后续椭圆检测奠定基础。
图11~13为不同情况下的椭圆检测对比结果。其中,拟合好的椭圆边界用绿色线条表示,红色线条表示椭圆的长半轴和短半轴,RED算法和本文改进算法的拟合精度相当,如图14所示为立体十字标志器中椭圆提取效果,由于边缘较为复杂,直接采用RED算法提取椭圆时存在明显的拟合误差,而采用先进行边缘检测分类,再利用RED算法后能够得到高精度的拟合效果。表1所示为图像1到4分别采用RED算法和本文改进RED算法提取椭圆的耗时量。从中可看出,对于干扰边缘较少的情况下,两种算法耗时量相近,对于边缘较复杂或者存在干扰边缘的情况下,和直接采用RED算法相比,本文算法在保证椭圆拟合精度同时,算法耗时量明显减少。
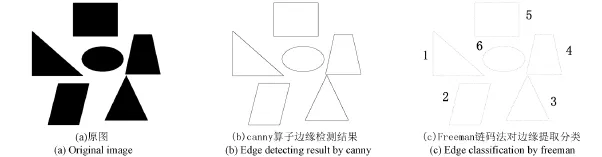
图10 边缘检测结果Fig.10 The results of edge detection

图11 简单几何图形中椭圆检测结果Fig.11 The detection results of simple geometry
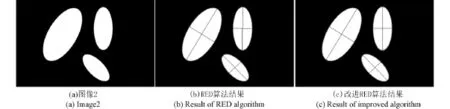
图12 多个独立椭圆检测结果Fig.12 The detection results of many independent ellipses
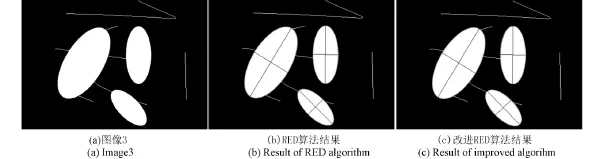
图13 存在很多干扰的多个独立椭圆检测结果Fig.13 The detection results of many independent ellipses under background interference
为进一步验证本文算法在非合作目标空间圆上的检测效果,本文仿真生成了如图15~16所示的空间非合作目标图像,其上都有空间圆存在,图15显示了在仿真生成的立方体上提取空间圆的效果,图16显示了应用本文算法提取卫星上星箭对接环的效果,绿色线条表示应用本文算法提取到的空间圆的椭圆边界,红色的线条表示提取到椭圆的长短轴。

图14 标志器上空间圆投影椭圆检测结果Fig.14 The detection results of many ellipses on cooperation marker

图15 空间圆检测Fig.15 Space circle detection
卫星上星箭对接环检测结果Fig.16 The detection results of the docking ring
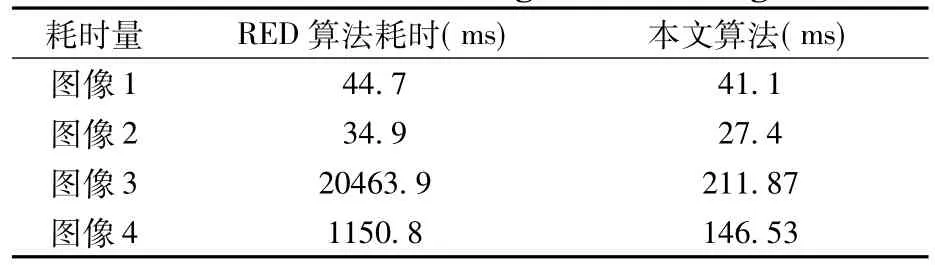
表1 两种算法耗时情况Table 1 The time-consuming of the two algorithms
5 结论
本文主要对空间在轨服务中具有较为明显的空间圆特征的星箭对接环或发动机喷管等目标提出一种检测方法。该方法主要通过Canny算子检测边缘、Freeman链码法对边缘进行提取分类以及利用RED算法进行非合作空间圆目标检测,并对仿真的空间圆投影椭圆和立体空间圆目标进行了实验验证。结果表明,和传统的RED算法相比,本文提出的方法能够明显降低耗时量,同时保证了一定的检测精度。非合作目标空间圆的检测是实现非合作空间圆目标的精确定位、在轨捕获的前提,该项检测技术具有较为广阔的空间在轨服务应用前景,为将来实现非合作航天器的在轨服务技术奠定了良好基础。
[1]李岩,蔡远文,崔晓阳.在轨服务飞行器总体技术分析[J]. 兵工自动化,2011,30(4):1-5.
[2]崔乃刚,王平,郭继峰,等.空间在轨服务技术发展综述[J].宇航学报,2007,28(4):805-811.
[3]谭春林,刘永健,于登云.在轨维护与服务体系研究[J].航天器工程,2008,17(3):45-50.
[4]梁斌,杜晓东,李成,等.空间机器人非合作航天器在轨服务研究进展[J].机器人,2012,34(2):242-256.
[5]魏祥泉,黄建明,陈凤,等.合作目标超近距离自主影像导航技术研究[J].载人航天,2012,18(2):28-39.
[6]Nascimento J M.Hazard evaluation of the space debris in the geostationary orbit[C]//In:Proceedings of AAS/AIAA Astrodynamics Specialist Conference.Pittsburgh:Univelt Inc.2010.
[7]翟光,张景瑞,周志成.静止轨道卫星在轨延寿技术研究进展[J].宇航学报,2012,33(7):849-859.
[8]Scott D R.Method for extending the useful life of a space satellite:USA,US5511748 A[P].1996-04-30.
[9]Tarabini L,Gil J,Gandia F,et al.Ground guided CX-OLEV rendezvous with uncooperative geostationary satellite[J].Acta Astronautica,2007,61:312-325.
[10]Cura D,Manuel J.Conexpress orbital life extension vehicle(CX-OLEV)GNC[C]//AIAA Int.Astronaut Congress,Valencia,Spain,2006:4720-4733.
[11]李良福,冯祖仁,贺凯良,等.一种基于随机Hough变换的椭圆检测算法研究[J].模式识别与人工智能,2005,18(4):459-464.
[12]Hough Paul V C.Method and means for recognizing Complex Patterns:USA,US3069654 A[P].1962-12-18.
[13]LI Liang-fu,FENG Zu-ren,HE Kai-liang.A randomized algorithm for detecting multiple ellipses based on least square approach[J].Opto-electronics Review,2005,13(1):61-67.
[14]李良福,冯祖仁,贺凯良.一种基于随机Hough变化的椭圆检测算法研究[J].模式识别与人工智能,2005,18(4):459-464.
[15]宗露艳,吴陈.一种改进的Canny算子边缘检测算法[J].现代电子技术:2011,34(4):104-106.
[16]裘镇宇,危辉.基于Freeman链码的边缘跟踪算法及直线段检测[J].微型电脑应用,2008,24(1):17-20.
