基于驾驶人认知模式的荒漠地区运行车速预测模型
2014-11-17蒋晓君
蒋晓君
(新疆交通科学研究院,新疆 乌鲁木齐 830000)
0 引言
交通安全系统由人-车-道路和环境所组成,道路线形是影响交通安全的主要因素。我国道路线形设计以设计速度为主,缺点在于以固定的设计速度来确定道路线形,而车辆在实际行驶时速度不可能固定不变。高速公路连续使用极限设计指标,相应路段交通事故频发,且事故后果较为严重。研究表明,超过80%的交通事故与驾驶人的误判、操作失误有关,驾驶人误判的一般表现形式是速度控制不当[1-2]。在一些发达国家,基于运行车速法的道路线形设计已经得到广泛应用,该方法充分考虑驾驶人情况、车辆运行状况及道路交通形势,对降低公路交通事故率和事故死亡率有积极作用。而运行车速法的核心是运行车速预测模型的建立,本文基于驾驶人的认知模式,对新疆荒漠地区运行车速预测模型进行研究,可为道路线形设计的质量评价及提出相应优化方案和改善措施提供参考,提高新疆荒漠地区的道路交通安全。
1 驾驶人对道路环境认知特征分析
在行车过程中,驾驶人从外界感受到的是一个包含道路线形特征(包括平曲线半径、纵坡度、竖曲线半径)、道路宽度、路面铺装水平、视野以及天气、路面附着情况、限速设置和路侧状况等可以直接感受到的诸多影响驾驶人生理、心理和安全感的因素。驾驶人通过神经系统对这些特征因素进行综合感受并在大脑中形成对运行环境的安全等级判断,进而根据以往的经验对行车速度进行选择。同时,驾驶人员的行为特征和车辆本身的性能也会对车速产生重要的影响。总体来说,驾驶人车速的形成是由人、车、路、环境和管理等要素构成的一个智能型的闭环系统。
1.1 道路因素对驾驶人控速状态的影响
当汽车在荒漠地区道路行驶时,影响驾驶人控速状态的因素主要有道路几何线形要素、路面状况、车道宽度、交通安全设施等。在笔直的良好道路上,驾驶人的车速就会提高,在弯曲陡峭的平纵线形下车速就会降低;在行车视距大的道路上,驾驶人视野开阔,会提高车速,而在行车视距很小无法准确判别前方路况的情形下,驾驶人会降低车速并谨慎行驶。
1.2 人的因素对驾驶人控速状态的影响
驾驶人是车速选择的主体因素,在新疆荒漠地区道路环境中,车速过快易使驾驶人产生各种不利于驾驶的生理和心理反应,如反应迟钝、视觉障碍、脱水、头晕头痛、孤独恐惧、心情烦躁等,从而导致超速、违章操作、疲劳驾驶等危险情况。这些情况很大程度上是在特定道路环境下形成的,其主要原因归结于道路线形、路面状况、周围环境等情况。因此,驾驶人的操纵行为也是道路线形等因素的间接产物,或者说人的操纵等行为也是由于路况的影响。
1.3 车的因素对驾驶人控速状态的影响
车辆的类型不同(如载重不同),则其动力性能、制动性能、操纵稳定性等均不相同,本文选择四类典型的车辆展开研究,分别对小轿车、中型车(12t级)、三轴重型车(23t级)和五轴重型车(45t级)进行建模计算。
车辆在公路上的实际行驶过程表明,当交通密度小且气候条件良好时,驾驶人的行车操作意识只受公路的外廓特征(包括公路本身的技术条件及路侧环境条件)影响,在这种条件下驾驶人对车速的控制只由驾驶人的“道路安全感”决定。因此,对于特定类型的车辆,可以将车辆运行速度看作道路平曲线半径、纵坡度、路面宽度、行车视距、环境危险程度等变量的函数,因此,车速可用如下函数描述:

式中:V为驾驶人的运行车速;R为道路平曲线半径;S为纵坡道;L为道路宽度;E为行车视距;G为道路环境危险度。
2 基于模糊规则的驾驶人车速选择模型
对于车辆驾驶人来说,在驾驶过程中能够直接感受到的“道路结构要素”是一个由道路几何参数和道路路面参数等多重因素构成的信息激励系统,其中,道路几何参数包括横断面、纵断面、平面线型,道路路面参数能够反映路面使用性能、服务能力和破损状况。驾驶人在行车过程中的“道路安全感觉”就是在适时认知当时当地路段的各种有效道路结构要素信息并逐一(或并行)做出安全性评估的情况下,进行综合评判的结果。驾驶人对车速水平的判断是基于原有的道路认知检验而得出的具有一定模糊性的规则。因此,针对特定的车型,可以建立一系列的车速控制模糊规则,用于表达驾驶人在不同线型量化程度下的车速水平。具体步骤可分为:(1)道路线形(平曲线半径和纵坡度等)认知的模糊子集及其隶属函数;(2)车速控制模型;(3)车速控制模式模拟计算模型。
2.1 建模试验路段
典型路段的选择综合考虑了新疆公路所经环境的地形特征、气候条件、交通环境状况、车流结构等因素。为了掌握新疆荒漠地区不同道路环境下车辆实际的行驶情况,完成了典型公路路段车辆实际运行状态的勘测。典型公路路段为30个以上高速公路测试路段(包括直线段、曲线段、普通路段及桥梁路段)。勘测内容包括不同等级公路典型路段的路面宽度、纵坡度、覆沙情况、视距长度、平曲线半径、横向风速、路面状况、路侧防护状况、路段性质、上坡车速及下坡车速。被测速的车辆包括小轿车、大客车、两轴货车及三轴以上半挂车,每个测试路段处分上行和下行独立测量,每种车辆车速的测量样本不少于20辆。
和库高速公路是G314线的重要组成部分,起点位于新疆巴音郭勒蒙古自治州和硕县,终点位于巴音郭勒蒙古自治州首府库尔勒市,是南疆第一条高速公路,是各地通往新疆南疆地区的重要通道,也是迄今为止南北疆各族人民逾越天山最重要、最便捷的陆路通道。和库高速公路全长92.4km,路基宽28m,共有四车道,路面为沥青混凝土高级路面,设计车速每小时120km,建设标准为全封闭、全立交的高速公路。路段参数勘测时间为2012年4月14日至2012年4月19日,历时6d,共测量30个测试路段。测量结果如表1所示,分析结果如图1、图2、图3所示。
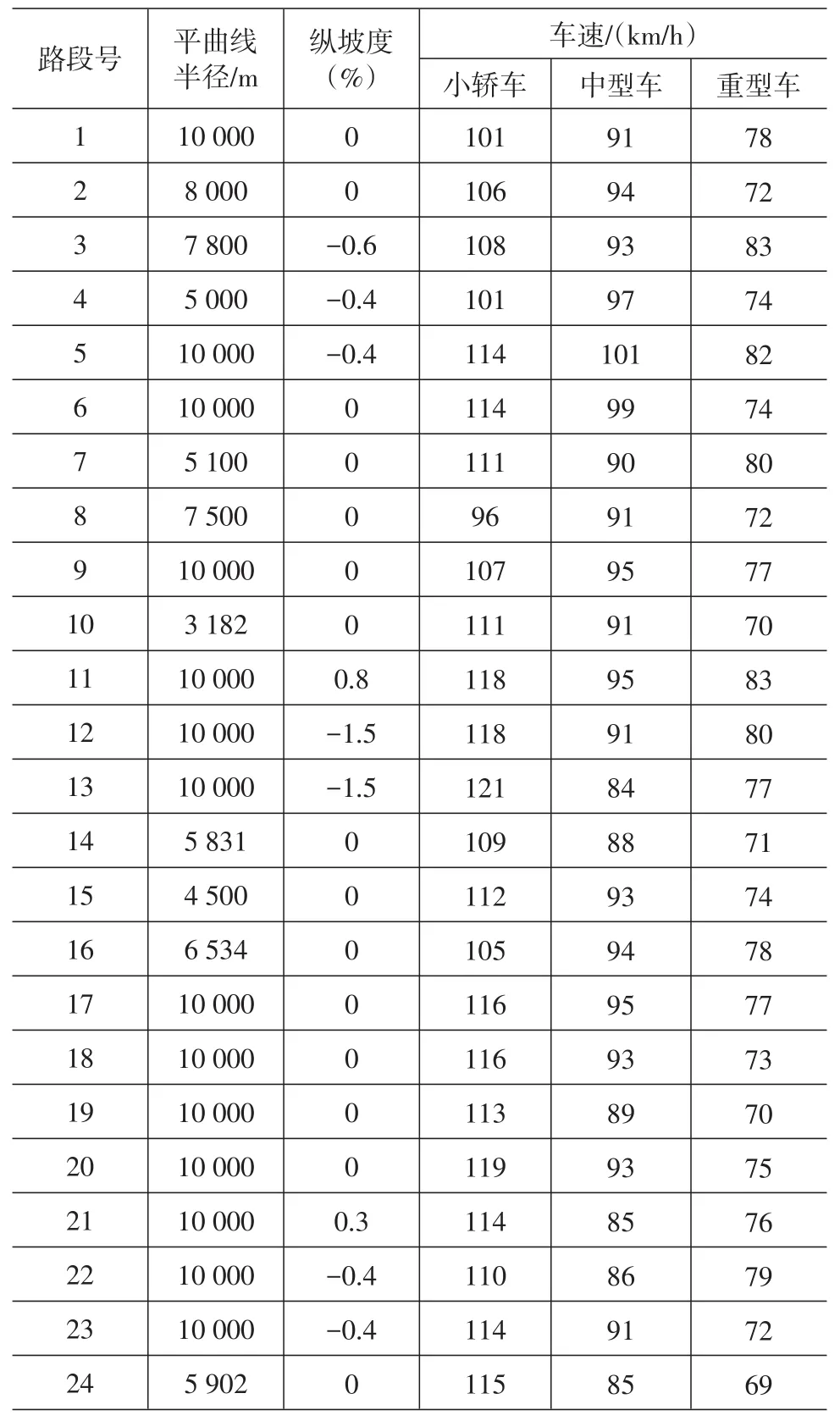
表1 高速公路路段参数及车速
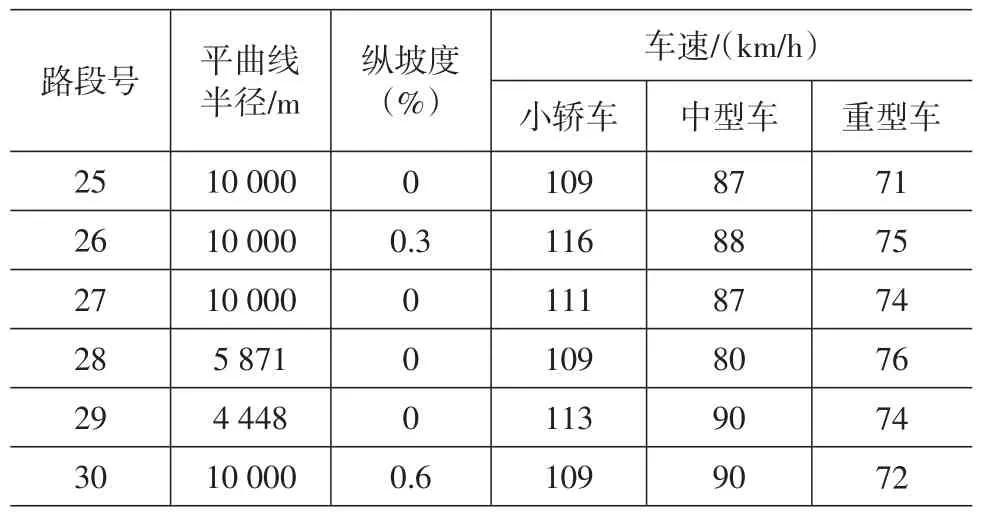
表1 (续)

图1 高速公路线形与小轿车车速散点图
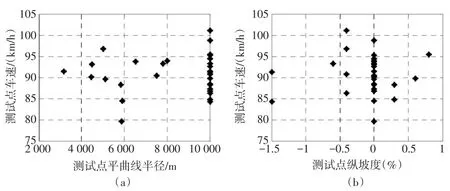
图2 高速公路线形与中型车车速散点图
图3 高速公路线形与重型车车速散点图
2.2 驾驶人的安全性认知模糊集及其隶属函数
2.2.1 道路安全性认知模糊集
研究对新疆荒漠高等级公路典型路段进行了实地测量,每个典型路段的记录参数有:平曲线半径、纵坡度、路面宽度、边坡高度、路面状况等。对于每一单元高等级公路,路面宽度基本相同,边坡高度的变化比较单调。在正常情况下高速公路路面状况较好,因此在评价驾驶人对同单元高等级公路各个典型路段的认知安全性时路面宽度和边坡高度可以忽略不计。为确定高等级公路安全性认知的变量,建立新疆荒漠道路安全性认知模糊集:
平曲线半径X1,模糊子集:{很缓弯,缓弯,较急弯,急弯},记为{A11,A12,A13,A14}
纵坡坡度X2,模糊子集:{很平缓,缓坡,较陡坡,陡坡},记为:{A21,A22,A23,A24}
2.2.2 安全性认知试验及认知评价模型
将38位具有不同驾驶经历和有着较高表述能力的驾驶人作为该路段安全性认知评价试验“专家”,以131处经过实测记录的高等级公路典型路段为模糊统计试验道路样本,对各处路段的平曲线半径、纵坡度等道路安全性认知变量按照评语集进行现场实地观察评价,模糊统计试验得到的有效认知评价数据为1785组,针对各道路认知变量的评语汇总结果得到的安全性认知变量论域空间覆盖频率曲线如图4和图5所示。
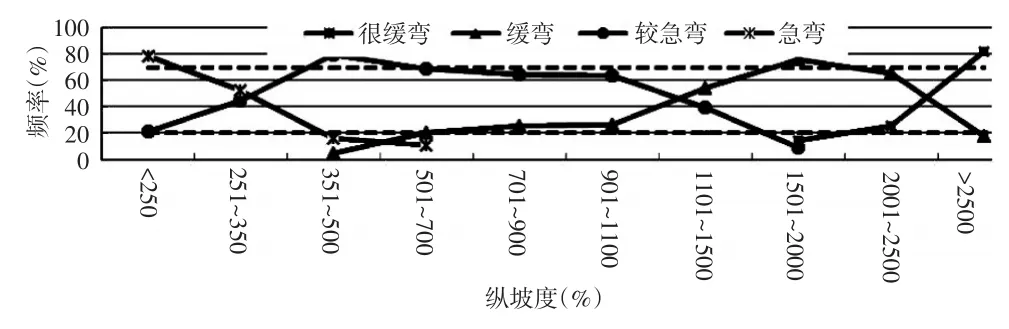
图4 高等级公路路段平曲线半径安全性认知频率统计图
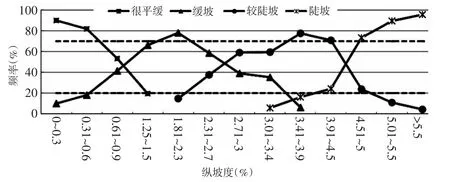
图5 高等级公路纵坡度安全性认知频率统计图
分别取其80分位人次“专家”的有感评价(0.2-截集)为各认知评语域的非零集,取0.7置信水平(0.7-截集)频率区间为各认知评语域的确定集,从截割结果可以确定道路平曲线半径评语模糊子集的隶属函数、纵坡度评语模糊子集的隶属函数都为梯形结构。根据所研究问题的性质,最后经对各评语模糊子集试验所得界域值的圆整,建立汽车驾驶人对道路安全性的认知评价模糊模型如表2所示,此模型的作用是实现道路结构确定值向认知评价模糊值的转换。
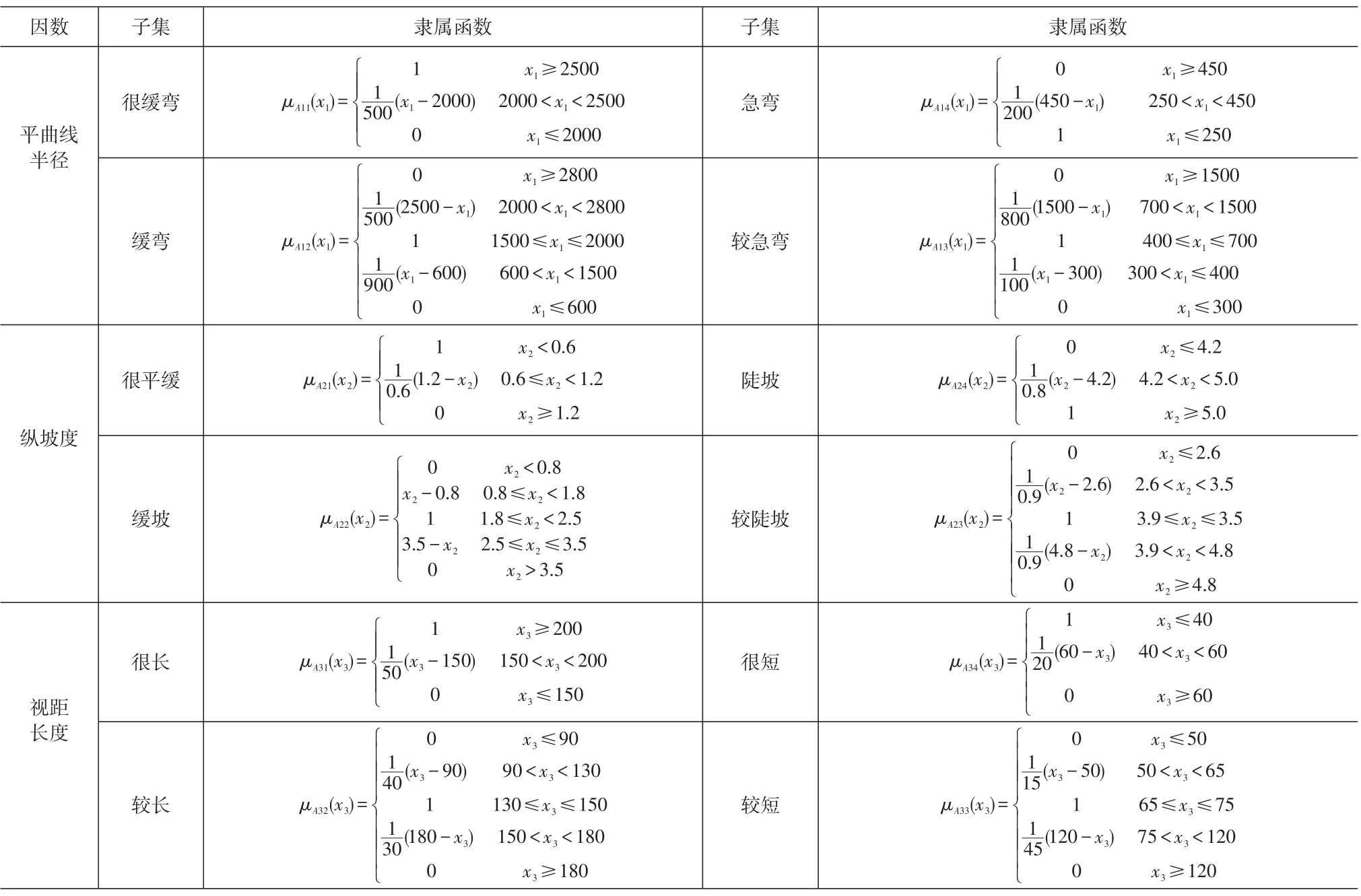
表2 汽车驾驶人对高等级公路的安全性认知评价模糊模型
2.3 车速控制模型
2.3.1 输出变量模糊子集及其隶属函数
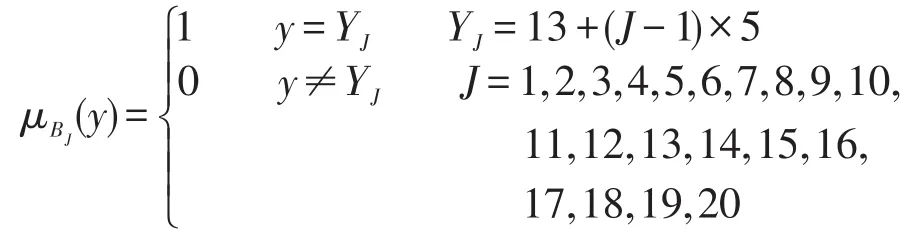
驾驶人控制的实际行驶车速为本模型的输出变量{Y(km/h)},其模糊子集设定可为:
BJ=11+5×(J-1)×15+5×(J-1)J=1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20
将模糊子集BJ的隶属函数 μBJ设定为棒形:
2.3.2 输入/输出样本集
本研究中建立车速模糊控制规则所需的输入/输出样本数据是通过对314段高等级公路的道路观测试验来获取的,具体获取步骤为:
(1)测量(或观测)并记录每个试验路段的道路和交通环境参数作为输入变量样本;
(2)在自由流交通状况下(车流量<300辆/h),用雷达测速仪测定各类车型(小轿车、中型车、重型车)在该路段的平均行驶车速作为输出变量样本。
即,对于每一种车型都有:

2.3.3 模糊控制模型和模糊规则
若 μM=0,则该r组合的条件部不存在对应规则。
若 μM≠0,则进一步计算使该r组合条件部成立的全部样板组的输出平均值:
可以得到第r条模糊规则:

重复上述步骤,完成全部组合形式,即建成在新疆荒漠高等级公路上驾驶人关于速度的模糊控制模型。经编程计算可得到小轿车、中型车和重型车驾驶人在高等级公路上进行速度控制的模糊规则集,在模拟得到驾驶人对公路路段的认知评语的情况下,即可根据模糊规则集中的对应规则求得控制车速。
2.4 逻辑推理模型计算
驾驶人在新疆荒漠公路路段上驾车行驶时,在潜意识中将首先对该路段的道路结构和交通环境进行安全性评价,然后根据经验(MF控制规则)进行模糊逻辑推理,从而控制行车速度于自认为安全的域值。即驾驶人在特定公路路段上控制车速的过程是根据模糊关系合成法进行逻辑推理的过程,其数学描述如下:
根据每类车型的MF规则,第j条MF规则关系为Rj:

根据道路交通环境信息指标值{x1,x2}与控制车速y之间的逻辑推理关系,μB0(y)的值可表达为:

若用wj表示对第 j条控制规则的适用度,即:

则有:
最后应用重心法将上述模糊逻辑推理的结果转换为非模糊化对应控制车速,即

根据上述模型计算分析,在如图6所示的计算机软件中基于模糊规则分析求取高速公路驾驶人运行车速模型,结果表明驾驶人在特定公路路段上控制车速的过程是根据模糊关系合成法进行逻辑推理的过程,在得到运行车速的不同水平后,应用重心法将上述模糊逻辑推理的结果转换为非模糊化对应控制车速。该方法的实践和运用将大大提升道路交通安全评价,并为深入研究路网模式奠定基础。
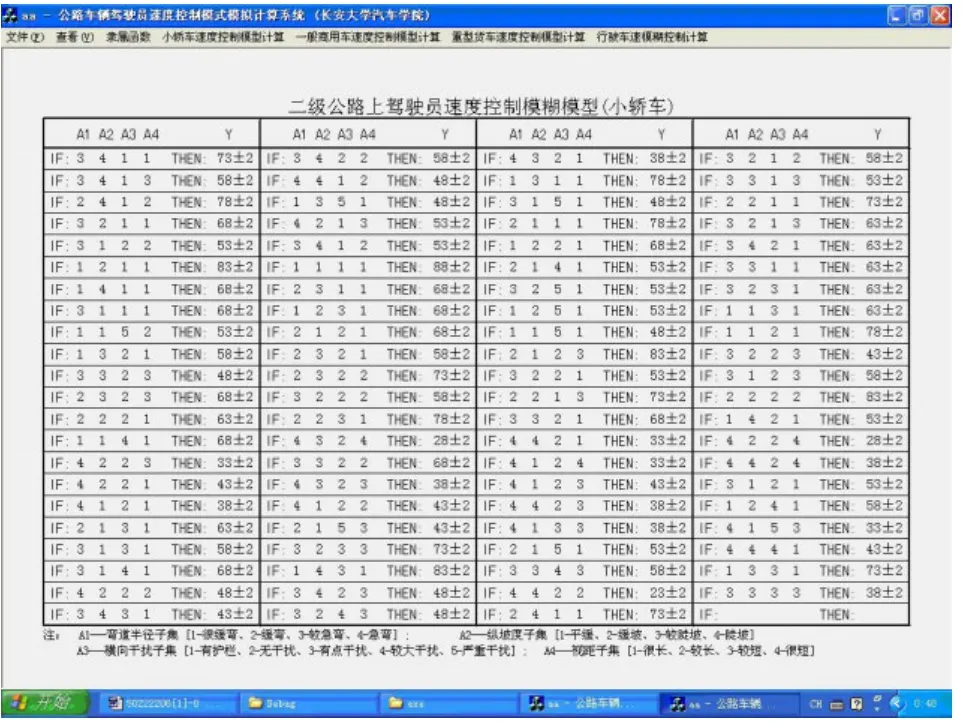
图6 基于模糊规则的高速公路驾驶人运行车速模型
3 结语
基于驾驶人对新疆荒漠地区道路情况及周边环境的不同认知,建立一种新的荒漠地区公路运行车速预测模型,该模型可以作为新疆荒漠地区道路交通线形设计的基础,为道路实际的安全运营提供依据。研究过程中选取了道路平曲线半径、纵坡道、道路宽度、行车视距和道路环境危险度等作为模型参数,建立的模型对新疆荒漠地区运行车速预测精度较高,具有非常高的推广应用价值。研究表明,基于驾驶人认知模式的运行车速预测是合理、有效且准确的,可以为新疆荒漠地区以运行车速为概念基础的道路线形设计提供技术支撑。
[1]魏朗,陈涛,高丽敏,等.汽车驾驶员车速控制模式的模拟研究[J].汽车工程,2005,27(6):695-701.
[2]陈涛,张淼,魏朗.基于预瞄的山区高速公路弯坡组合段驾驶人车速模糊控制模型[J].北京理工大学学报,2012,32(1):51-54.
[3]郑安文,牛倬民,郭建忠.高速公路道路因素与道路交通安全分析[J].武汉科技大学学报,2002,25(2):168-172.
[4]魏静.道路交通事故中非主观因素分析及建模[D].天津:天津大学,2004.
[5]高建平,郭忠印.基于运行车速的公路线形设计质量评价[J].同济大学学报:自然科学版,2004,32(7):906-912.
[6]马璐.道路因素对道路交通安全的影响分析[D].西安:长安大学,2005.
[7]Gibreel G M,Hassan Y,EI-Dimeery I A,etc.State of the Art of Highway Geometric Design Comsistency[J].Jounal of Transportation Engineering,1999,125(4):305-313.
[8]Zhou Na,Wang Shuangwei,Xi Jianfeng,etc.Grey Synthet⁃ic Degree of Incidence Entropy and its Application in Traf⁃fic Accidents Analysis[J].The Journal of Grey System,2010,22(3):257-264.
[9]陈军.公路线形连续性设计方法的研究[D].天津:天津大学,2004.
[10]郭风香,熊坚,秦雅琴,等.基于驾驶模拟实验的85%位车速预测模型[J].交通科技与经济,2010(3):104-108.
[11]Viola P,Jones M.Rapid Object Detection Using a Boosted Cascade of Simple Feature[C]//Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Colorado Springs.Hawaii:IEEE,2001:511-518.
[12]田世艳,刘伟铭.基于模糊综合评价的路段实时交通状态判别方法研究[J].科学技术与工程,2010,10(29):7206-7210.
[13]钟小明,荣建,刘小明,等.高速公路弯坡路段小客车自由流运行速度模型研究[J].公路交通科技,2004,21(12):84-88.
