机器人手爪的功能分析与设计研究
2014-11-16朱金权
朱金权
(无锡贝斯特精机股份有限公司,江苏 无锡 214000)
1 概述
在现代工业领域中,机器人越来越多的被运用于各行各业。作为机器人的执行机构,机械人手爪自然在各行各业中不可缺少、大显身手。机器人手爪的功能是否完善、性能是否可靠、工作是否安全将直接影响机器人机械性能的好坏和工作效率的高低,研究机器人手爪的功能要求和设计要点,对推广工业机器人的运用,提高工业机器人的性能,最大限度发挥机器人的效率,具有重要的指导意义。
2 功能要求
机器人手爪功能是机器人在接收到抓取工件信号后,按指定的路径和抓取方式,在规定的时间内完成工件取放动作的功能性参数。机器人在抓取工件的过程中,为保证抓取工件的可靠性,机器人手爪应具备一定的抓取运动范围、工件在手爪中可靠定位、适当的夹紧力、工件抓取后的检测报警、工件清洁所需的气管、机器人手爪断电保护等相关功能。
2.1 抓取运动范围要求
抓取运动范围是手爪抓取工件时手指张开的最大值与收缩的最小值之间的差值。由于工件的大小、形状、抓取位置的不同,为使手爪适合抓取不同规格的工件,手爪的运动范围应有所不同。工作时工件夹紧位置应处于最大值与最小值之间,在工件夹紧后,手指的实际夹紧位置应大于手指收缩后的最小位置,使工件夹紧后夹紧气缸能有一定的预留夹紧行程,保证工件可靠夹紧。
2.2 工件在手爪中的定位要求
为使手爪能正确抓取工件,保证工件在机器人运行过程中与手爪能可靠的接触,工件在手爪中必须有正确、可靠的定位要求。需分析零件的具体结构,确定零件的定位位置及定位方式。工件的定位方式有如下几种:
(1)工件以平面定位:工件在手爪中以外形或某个已加工面作为定位平面,定位后工件在手爪中具有确定的位置,为保证工件可靠定位,需限制工件的6个自由度。一般大平面限制3个自由度,侧面限制2个自由度,另一侧面限制1个自由度。定位元件一般采用支承钉或支承板,并在手爪中以较大距离布置,以减少定位误差,提高定位精度和可靠性。支承钉或支承板与手爪本体的联接多采用销孔H7/n6或H7/r6过盈配合联接或螺钉固定联接。
(2)工件以孔定位:工件在手爪中以某孔轴心线作为定位基准,定位元件一般采用芯轴或定位销。
芯轴定位限制4个自由度,根据不同要求,芯轴可用间隙配合芯轴、锥度芯轴、弹性芯轴、液塑芯轴、自定心芯轴等。
定位销分短圆柱定位销、菱形销、圆锥销、长圆柱定位销,分别限制2个自由度、1个自由度、3个自由度和4个自由度。定位销与手爪本体的联接多采用销孔H7/n6或H7/r6过盈配合联接。
(3)工件以外圆表面定位:工件在手爪中以某外圆表面作为定位面,与安装于手爪本体上的套筒、卡盘或V形块定位。采用V形块定位,对中性好,可用于非完整外圆的表面定位。长V形块限制4个自由度,短V形块限制2个自由度。套筒、卡盘分别限制2个自由度。
2.3 夹爪夹紧力及扭矩要求
2.3.1 手爪夹紧力及扭矩的计算
(1)初始条件
手爪抓取的工件质量m ;如:20kg
从手抓上顶边到工件几何中心的距离L;如L=200 mm
重力加速度g;( 9.81m/s2);
机器人手爪运动时的加速度a;(m/s2);如:a=5 m/s2
机器人手爪夹持面与工件之间的摩擦系数μ;
夹持工件时的安全系数S:(通常取S=2)
机器人手爪夹持工件时所需的夹紧力:F (N)
(2)几种夹持形式,机器人手爪所需夹紧力或夹紧扭矩的计算
①机器人手爪“只考虑摩擦系数作用下”的计算示意图如图1所示。
计算公式:
夹紧力:
扭 矩:M=F×L=5924×0.2=1184.8(N·m)
②机器人手爪“使用对应抓取物品形状的夹爪”时的计算示意图如图2所示。
计算公式:
夹紧力:
F=m×(g+a)×S=20×(9.81+5)×2=592.4(N)
扭矩:
M=F×L=592.4×0.2=118.48(N·m)
③机器人手爪“使用菱形夹爪抓取物品”时的计算示意图如图3所示。
计算公式:
夹紧力:
FZ=m×(g+a)×S=20×(9.81+5)×2=592.4(N)


图1
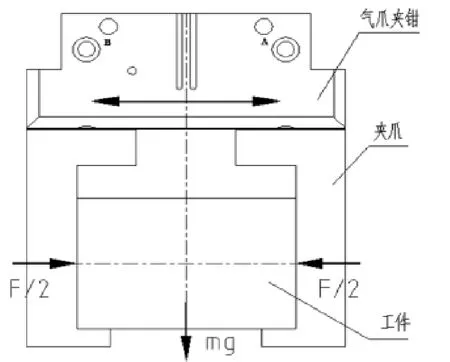
图2
扭矩:MZ=FZ×L=592.4×0.2=118.48(N·m)
扭矩:MY=FY×L=866×0.2=173.2(N·m)
上式中,
FZ是夹爪手指沿图3中Z向所需的夹紧力;
FY是夹爪手指沿图3中Y向所需的夹紧力;
MZ是夹爪手指沿图3中Z向所需的夹紧扭矩;
MY是夹爪手指沿图3中Y向所需的夹紧扭矩;
α是菱形夹爪手指的V型槽角度;如α=120。
值得注意的是:机器人的运动方式和抓取角度可能会产生变化。机器人水平翻转或沿抓取物品的轴向(图3中Y向)运动时。抓取方式将由菱状抓取(图3中Z向)变为仅靠摩擦力抓取(图3中Y向)。因此,在计算手爪所需夹紧力或夹紧扭矩时应分别计算手爪Y向(即轴向)和Z向(即径向)的夹紧力或夹紧扭矩的大小,取两者中较大者作为手爪所需的夹紧力或夹紧扭矩,以满足手爪随机器人抓取工件时在空中翻转和变换姿态时的需要,保证爪手抓取工件时能提供足够的夹紧力或夹紧扭矩,并可靠夹紧工件。
2.3.2 物理量单位说明
重力加速度:g ( 9.81m/s2)
质量:kg;
扭矩 : N·m
长度:m;
夹紧力:N
加速度: m/s2
2.4 工件位置检测要求
机器人手爪抓取工件后按照工艺流程和PLC程序将执行下一步动作,在执行此动作前,需告知工件在手爪中的位置是否正确,并将该结果以电信号的形式发送给机床和相关专用设备,以使机床和相关专用设备能提前做好接收工件的准备工作,如:松开夹头、清洁定位面等。工件在手爪中的位置检测一般通过位置传感器确定,传感器可采用接近开关、光电开关等与PLC联接,通过PLC的控制确定工件的位置。如工件位置不符合要求,PLC将不执行下一步工作,以保证手爪和机床等工作设备的安全性和可靠性。
2.5 工件清洁要求
工件在手爪中定位时,为保证工件位置的正确和定位夹紧的可靠,手爪中工件的定位面、夹爪的夹紧面、插销的定位孔、工件的外表面等必须予以清洁处理,去除定位面、夹紧面、定位孔、外表面的灰尘或垃圾,从而使工件在手爪中定位正确、夹紧可靠。
2.6 安全要求
手爪在抓取工件后,通过手爪手指的夹紧力将工件与手爪可靠的联接在一起,为保证工件与手爪在机器人运行过程中安全可靠,要求机器人手爪运行过程中如夹钳体突然断气或断电后,手爪手指仍能可靠的夹紧工件,保证工件抓取后运行的可靠性、安全性。这是手爪必须具备的安全功能,是机器人手爪的重要性能和参数。
3 结构设计
机器人手爪结构是机器人手爪设计的重要环节,机器人手爪结构设计是否合理、定位是否满足要求、夹紧是否安全可靠、检测传感器是否安装、清洁装置有无考虑、安全要求是否具备等,都是结构设计时必须考虑的问题。
3.1 工件结构形式分析
结构形式分析是机器人手爪设计的重要步骤,有效分析工件的结构形式,充分利用工件自身的结构特点,综合考虑工件的定位形式、夹紧机构,设计出满足上述功能要求的体积小、质量轻、效率高的机器人手爪。设计时应考虑以下几点:
(1)考虑机器人手爪与机器人第六轴的联接方式。根据机器人第六轴安装板的结构特点,设计出符合安装要求的机器人手爪安装联接板,它是机器人手爪的承载本体,是整个机器人手爪的受力基础,设计时应充分考虑安装板的强度、结构和固定方式等。
(2)考虑机器人手爪与机器人第六轴的联接时的定位要求。由于机器人在抓取工件时具有很高的重复定位精度,机器人手爪与机器人第六轴的联接应具有可靠的定位结构,以保证两者之间的联接不会影响机器人本身的精度。定位结构通常有:孔轴台阶定位、定位销孔定位、键槽定位、定位轴套定位等。
(3)机器人实际工作中,机器人手爪随机器人第六轴一起运行,为减少机器人的负载,提高机器人的性能,最大限度发挥机器人的优势。在设计机器人手爪结构时应尽量减少机器人手爪的体积,减轻机器人手爪的自身重量。在结构上可以采用挖空减重、分体焊接等形式,材料上可以采用精密压铸的铸铝件等强度高、重量轻的结构。
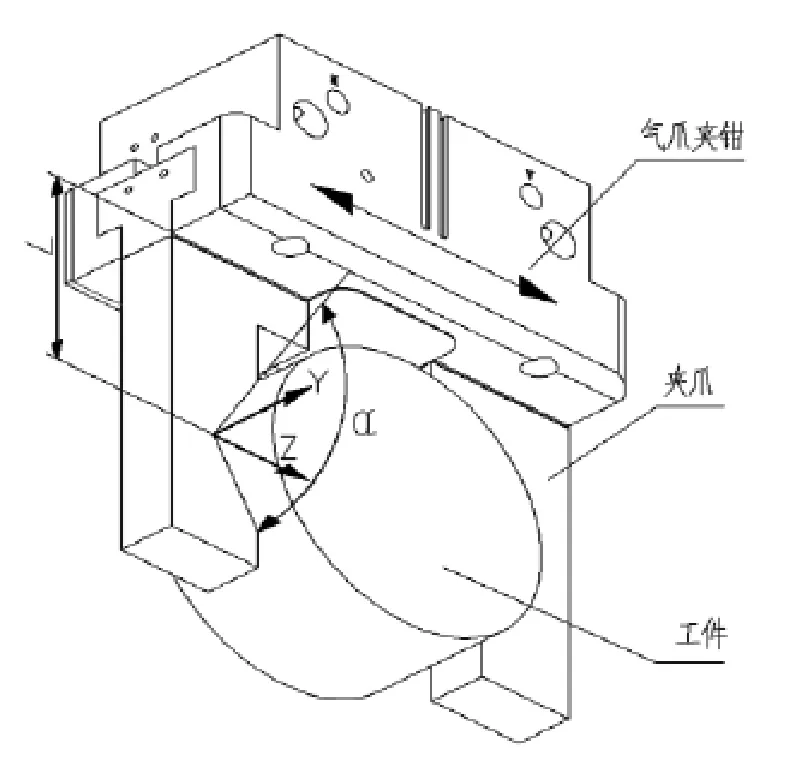
图3
(4)由于机器人手爪上有驱动手爪松开夹紧的气缸或电机,有用于检测工件位置的传感器,有用于清洁的吹气气路等,这些元件的联接电缆和管路都必须通过机器人手爪与控制元件(如:电磁阀)或中间接线盒相联接,为使这些线路联接美观,设计时应考虑这些线路的走向和固定位置,并考虑机器人手爪在空中翻转和变换姿态时减少线路缠绕和与工件摩擦。既可自行设计线路走向及固定方式也可采用国际品牌“易格斯”专业拖链固定线路,既美观方便又能降低运行噪音。
3.2 确定工件的定位点及夹紧方式
确定工件在机器人手爪爪中的定位点及夹紧方式是机器人手爪设计的关键。根据上述“工件结构形式”的分析,结合工件自身的结构特点,寻求符合工件要求的定位点及夹紧方式。设计时除满足上述定位要求外,需考虑以下几点:
(1)定位元件表面应淬火处理,满足定位元件的耐磨性要求。
(2)定位平面的所有定位元件应等高,可采用安装后一次磨平的方法来保证。
(3)对与工件定位表面不规整和尺寸变化较大的场合,可采用“可调支承定位”。
(4)对与工件毛坯表面、断续表面、阶梯表面的定位,可采用“自位支承定位”,一般采用球形布置与工件三点接触或杠杆式结构,与工件两点接触。
(5)工件的夹紧点与定位支承点应在同一作用线上,避免因工件虚压而引起局部变形。
(6)工件夹紧过程中不能改变工件定位后的正确位置,夹紧力大小应可靠、适当。
(7)夹紧力方向应有利于定位工件稳定,且主夹紧力方向指向定位基准面。
(8)夹紧力方向应有利于减少夹紧力,尽量和重力方向一致,以利于有效简化夹紧机构。
(9)夹紧力方向应是工件刚度较高的方向。
(10)夹紧力的作用点应落在定位元件的支承范围内。
3.3 确定工件检测传感器的位置及数量
机器人手爪中是否有工件,工件在手爪中是否具有正确的位置,可以通过机器人手爪上的传感器进行检测,并将检测结果告知机床或其他专用设备。传感器的安装位置应避免与工件装夹时碰撞,以免避免损坏传感器,应设计时考虑必要的传感器保护装置。应充分了解传感器的技术特性,选择与工件材质、颜色、检测距离相匹配的传感器,保证工件检测的正确性与可靠性。传感器的布置应具有防呆纠错功能,能有效防止工件反装或错装。传感器的数量以满足检测要求为准,可根据设计需要具体确定。
3.4 工件表面的清洁
工件定位面的灰尘、定位元件支承面的垃圾、工件表面的切削液等,在工件装夹前均需要清洁处理,这是保证工件正确装夹的前提。为能有效清洁这些表面,通常在工件定位元件的支承面、定位插销的端面、工件表面附近设置专门用于清洁用的气道口,这些气道口通常直径Φ2~3mm,与控制气路上用于“通”“止”的气动电磁阀相联接,通过电磁阀阀芯位置的切换,有效控制气路的“接通”与“停止”从而实现工件表面和定位面的有效清洁。
3.5 手爪的安全性
机器人手爪是自动化生产线中运动部件,在夹持工件运动的过程中,必须保证手爪能可靠夹持工件,保证工件在传输过程中万无一失。为确保机器人手爪的安全性,设计时应考虑以下几点:
(1)采用自行设计的夹紧机构时,夹紧机构夹紧工件后应具有机械自锁功能,避免机器人运动过程中,机器人手爪松开而导致安全事故。
(2)采用夹紧气缸夹紧工件时,为能有效夹紧工件,夹紧气缸在工件夹紧后应预留3~5mm的夹紧行程。因此,在选择气缸行程时除使气缸行程满足夹紧范围要求外,还需考虑增加气缸夹紧工件时的预留行程。
(3)为保证夹紧工件的可靠性,设计时可考虑采用国外先进夹紧气爪,这些气爪在突然断气时都具有夹紧保护功能,这是国外成熟技术,可以取其优点,为我所用。如德国的“SOMMER”、“雄克”等品牌。
(4)采用夹紧力方向与工件重力方向一致,用工件重力或重力的分力防止工件夹紧后松开。
(5)在机器人手爪上增设安全插销机构,当工件夹紧后,安全插销将夹紧位置“牢牢锁住”,从而起到安全保护作用。
3.6 机器人手爪设计的步骤和思路
通过分析工件的结构形式、机器人手爪的基本功能和机器人手爪设计时的相关技术要点,对机器人手爪设计的步骤和思路提出以下几点要求:
(1)充分分析工件的结构特性,明确工件定位所需的位置、夹紧力或夹紧扭矩所需的大小和方向。
(2)根据工件的结构特点和空间大小,选取适合的定位元件和定位方式。
(3)根据工件的结构和定位方式选择合适的夹紧点和夹紧机构。使定位点和夹紧点能有效减少工件的夹紧变形并保证工件夹紧可靠。
(4)合理布置清洁气路和检测元件的线路走向,使线缆布置更美观合理。
(6)根据机器人手爪的结构和工件的位置,确定传感器的位置和数量。
(7)根据上述思路,绘制详细的机器人手爪装配总体布置图,并确定手爪松开、夹紧时的最大、最小运动范围。
(8)对可能出现的几种总体布置方案进行工艺性和经济性分析,选择结构布置最优、工艺性能最好、制造成本最低的总体布置方案。
(9)对方案图做进一步细化和完善,使设计文件符合工厂实际生产的要求。
结语
机器人手爪是自动化线中重要的组成部件,是自动化生产线的执行机构,机器人手爪性能的优劣直接决定机器人工作效率的高低。研究机器人手爪的相关功能和设计要点,理清机器人手设计思路和注意事项,对完善机器人手爪的结构设计、优化机器人手爪的设计参数、提高机器人手爪的工作效率。具有现实的借鉴和参考价值,为机器人手爪在现代工业制造领域的推广和应用提供技术支持。
[1]聂余满,许德章,王勇,等.一种欠驱动水下机器人手爪的作业能力研究[J].机器人 ,2005 (06).
[2]张二力.工业机器人机械手爪的设计改进[J].机器人,1990(03).