多序列激光阴影成像技术研究及应用
2014-11-15谢爱民柯发伟
谢爱民,黄 洁,宋 强,郑 蕾,柯发伟,柳 森
(中国空气动力研究与发展中心,四川 绵阳 621000)
0 引 言
随着人类探索太空领域活动的日益增多,解体航天器产生了大量速度高达几km/s到几十km/s的碎片,这些超高速度飞行的空间碎片以及太空中速度极高的陨石(类似碎片)对航天器以及宇航员的安全构成了严重威胁,因此有必要开展这些空间碎片对航天器破坏程度的试验研究[1-2]。
在地面上开展大量撞击速度大于5km/s的超高速碰撞试验是研究航天器抗空间碎片撞击性能的主要方法之一。在这样的撞击条件下,弹丸和靶材会破碎甚至液化、气化,形成碎片云。碎片云颗粒的大小、空间分布和发展变化等直接反映了材料和结构在极高冲击压力下的动态响应特性,是改进防护材料和结构设计,提升航天器防护能力的重要依据。因此,对碰撞产生的碎片云发展过程进行记录分析是其中重要的试验研究内容。试验中,通常用超高速摄影仪器或X光照相系统完整清晰地记录弹丸撞击靶材和碎片云形成过程。为了使每幅图像不会因为记录目标的高速运动造成模糊,每幅图像的记录时间必须足够短。在几十微秒的撞击过程中要获得多幅图像,超高速摄影仪器的幅频至少应达到100万幅/s。
目前,美国、德国和日本等国家为了对高速或超高速目标变化过程进行清晰成像,发展了高速和超高速数字摄影机,这类摄影机主要包括2类:第1类使用单CCD的超高速数字摄影机,这类数字摄影机受图像存储或转移速度限制,在较高的帧频时图像分辨率将大大下降,甚至因为分辨率太低而失去了使用价值;第2类超高速摄影机使用多通道CCD,利用微通道板(MCP)技术,由上千伏高压驱动微通道板在ns量级的时间内实现光束选通和像增强,这类超高速数字摄影机通过调节序列间隔时间和微通道板的选通时间,幅频可以达到上亿甚至百亿幅/秒,但目前图像的像素也都不超过一百万。如国外研制的一种型号为HSFC的超高速数字相机,可以在1次试验中记录4幅或8幅图像,每幅图像的曝光时间最小为10ns,图像像素分辨率为1024×1024。图1为利用该相机获得的碎片云发展变化过程图像(图像来源于该相机的宣传册)。试验中,对测试区域进行了高强度光源照明,在具有强烈自发光区域出现了过度曝光现象[3-7]。
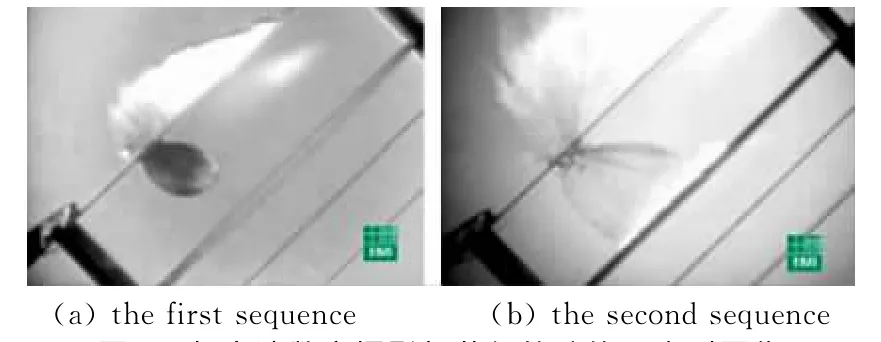
图1 超高速数字摄影机获得的碎片云序列图像Fig.1 Sequence images of debris cloud gotten by hypervelocity digital camera
为了进行超高速碰撞现象研究,中国空气动力研究与发展中心超高速所运用单幅激光阴影照相技术[2],在解决了系列衍射和干涉效应等影响后成功地获得了超高速碰撞过程中清晰的碎片云图像。在该技术基础上,运用多光源空间分离技术等先后实现了超高速碰撞过程的2序列、4序列和8序列激光阴影照相,可以在一次试验中清晰获得微秒级变化过程多个不同时刻的阴影图像。
1 单幅激光阴影成像系统
单幅激光阴影成像系统是超高速多序列激光阴影成像系统发展的基础,单幅激光阴影成像系统如图2所示。该系统主要由光源系统、准直系统和成像系统组成。光源系统发出的激光束经扩束后由准直系统转为平行光束,平行光束穿过测试区域后由成像系统把测试目标的阴影图像记录在胶片或者CCD上。图中准直系统的准直透镜口径为200mm,其口径大小确定了整个系统的测试视场。因为激光光源的脉宽小于10ns,尽管测试区域的测试目标速度达到5km/s以上,在阴影图像上不会因为目标的运动出现明显的模糊现象。图中光源和成像物镜采用对称型结构,可以最大限度消除系统存在的像差。
系统采用等待式成像方式,在试验前相机打开,并处于曝光状态。当弹丸撞击靶材某个瞬间时激光光源闪光,则测试区域的外形轮廓就被记录在胶片或者CCD上。激光光源的闪光信号由固体激光弹丸探测控制器提供,弹丸撞击靶材瞬间的时间信号由光辐射探测器提供。
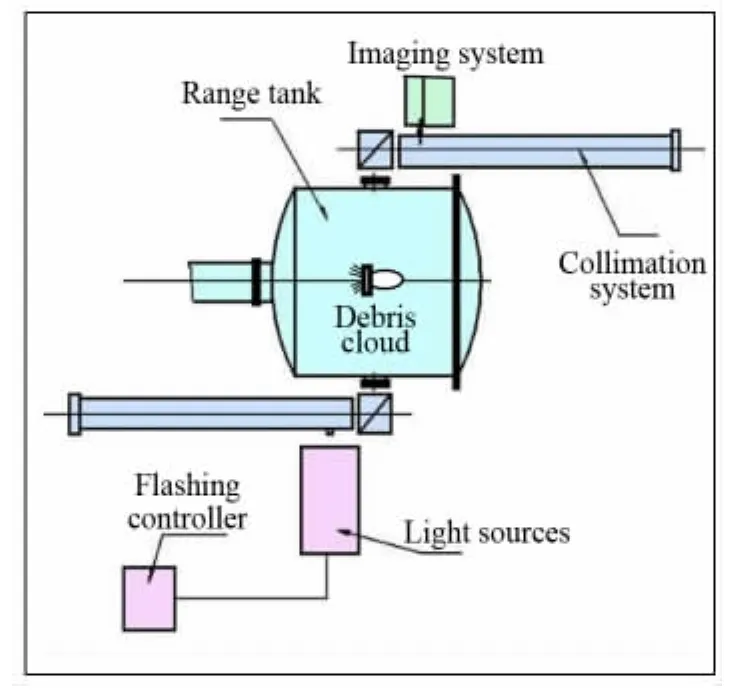
图2 激光阴影成像系统布置图Fig.2 Structure of laser shadowgraph system
根据阴影成像特点,该技术也适合对流场密度变化进行记录,对不同区域聚焦可以实现不同灵敏度的流场显示。当成像物镜对测试区域中心聚焦时,获得的目标像最清晰,但阴影仪的灵敏度设置为最小。
由于激光光源的单色性,光路中使用的光学器件出现瑕疵时可能会带来衍射环,如果光学器件表面膜层不良引起光束来回反射,则在成像区域可能会形成干涉条纹。同时碰撞瞬间会产生强烈的自发光(见图1),如果不进行消除会对阴影图像产生干扰。通过优化光路设计技术、补偿式滤光技术等都可以得到解决[8],最终该系统清晰获得了弹丸在正撞击和斜撞击靶材时的碎片云激光阴影图像,如图3所示。图3(a)是弹丸以V=5.52km/s正碰靶材后15.1μs时的碎片云激光阴影图像;图3(b)是弹丸以V=6.02km/s斜碰靶材后8.6μs时的碎片云激光阴影图像。从图中可清晰看见碎片云在撞击瞬间的外形轮廓,但由于该系统在试验中只能获得一幅阴影图像,不能对碎片云的形成变化过程进行清晰描述。为了满足超高速碰撞试验研究需求,有必要发展能够对碰撞现象过程的碎片云进行多幅图像记录的序列成像技术,而多序列激光阴影成像技术就是在基于单幅激光阴影成像技术基础上不断得到发展的。
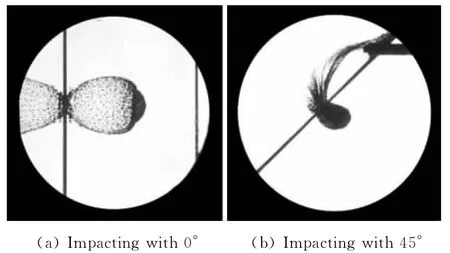
图3 单幅激光阴影成像系统获得的不同状态碎片云阴影图像Fig.3 Shadowgraph images of debris cloud at different state gotten by single laser shadowgraph system
2 多序列激光阴影成像技术
多序列激光阴影成像技术是在上述单幅激光阴影成像技术基础上增加多套成像光路,实现的主要指标为:一次试验获得2~8幅阴影图像、每幅图像的曝光时间小于10ns、序列间隔最小1μs以及图像像素大于600万。
2.1 超高速瞬态现象序列成像基本要求
对于某一测试区域,超高速目标现象发生的时间较短,通常只有几百μs甚至更低,而目标的运行速度达到了几km/s。因此,为了对目标变化过程清晰成像,通过多序列成像技术获得的每幅图像曝光时间必须很短,在图像上不能明显出现测试目标的拖影现象。
为了实现不同序列时刻能够对同一测试区域成像,则其成像光路必须相同或相似,而且不同时刻获得的图像需要在空间上进行分开。另外,为了满足不同测试需要,不同序列的间隔时间可调。
2.2 多序列激光阴影成像采用的关键技术
在满足上述要求前提下,通过解决下面的关键技术实现了多序列激光阴影成像。
(1)多光源空间分离技术
该技术主要原理为:在单幅激光阴影照相(见图2)基础上,增加多套光路,每套光路独立通过测试区域及不同的成像系统进行成像;同时要求在测试区域的光束几乎重合,成像系统获得的测试区域图像分别记录在不同的感光介质上,其光路布置如图4所示(图中只画出了两个序列的光路)。图4中多套激光光源光束扩束后的光斑直径应大于图中的准直镜直径。为了光束在通过球面反射镜后通过成像系统中的小孔时能够把多束光进行分开,激光通过扩束的汇聚点光斑相距可设置为0.8~1mm,则光束通过准直镜后的光斑也相距为0.8~1mm。当汇聚点光斑相距为1mm时,通过计算可以得到两束光在测试区域的重合度优于99%,因此两套成像系统基本上可以对同一测试区域进行成像。通过这样的分光方式,序列数目达到8个时的测试区域重合度可以达到95%。

图4 多序列激光阴影成像系统光路布置图Fig.4 Optical diagram of multi sequences laser shadowgraph system
(2)偏振分光技术
根据激光是偏振光原理,可以通过偏振片消除其它不需要的光束,一方面可以降低上述多光源空间分离角度,另一方面也可以消除部分杂光而提高信噪比。当紧邻的两光束偏振方向角度越大,则偏振分光的效果更好,因此需要在激光光源的出口处放置改变光束偏振方向的波片。对该技术的进一步介绍可参考文献[4]。
如果只利用多光源空间分离技术,则测试区域的重合度会降低,而只利用偏振分光技术则不能很好地进行分光。通过把偏振分光和多光源空间分离技术相结合,不仅有利于杂光的消除,提高成像的清晰度,同时,在序列数目达到8个时不同序列成像区域的重合度可以提高到97%,几乎是对同一区域成像。
(3)光束角放大技术
不同的平行光束通过图2中准直系统后会在不同的位置形成不同的焦斑,测试区域的像面就在焦斑不远处。但因为受空间的限制,不能在该位置放置太多的成像物镜。为了实现更多序列的激光阴影照相,需要对空间分离的角度通过光路进行放大。光束角放大采用的主要方法是在成像系统中使光束形成2次实焦点,并放大各个焦点相互之间的距离。如图5所示,通过球面反射镜后形成第1次实焦点,通过角度放大物镜后在成像面前形成第2次实焦点,在第2次实焦点处放置小孔光阑。
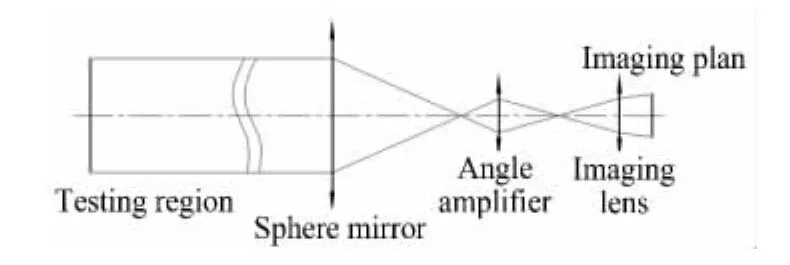
图5 光束角放大示意图Fig.5 Structure of light angle magnification
采用光束角放大系统,不仅可以在成像系统区域放置多套成像系统,而且更容易实现多光束的空间分离。
(4)补偿滤光技术
在超高速碰撞瞬间,温度超过了2000K,对测试区域成像时强烈自发光会掩盖真实的信息。由图1可以看出,在碰撞瞬间强烈的自发光会掩盖撞击靶材附近的碎片云真实信息。在多序列激光阴影成像系统中,如果对这些自发光不进行消除,则一样不能获得清晰的序列图像。
由于系统使用了激光光源,可以在成像物镜前使用窄带滤光片,以消除自发光,如图6(a)所示。通过实验证明,仅仅在成像物镜前放置滤光片,光束在物镜和滤光片之间来回反射,在图像中会产生类似于多光束干涉条纹,如图6(b)所示。当滤光片倾斜放置时可以消除干涉条纹,但会造成光束的不均匀,因此需要在滤光片前放置具有不同区域不同衰减功能的补偿器(见图6(c)),使成像光斑比较均匀。
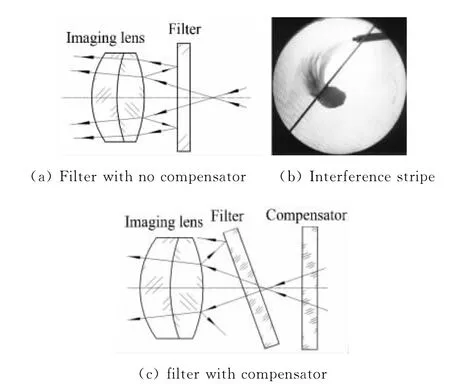
图6 消除自发光的滤光示意图Fig.6 Schematic of eliminatingspontaneous light
3 多序列激光阴影成像系统的建立及运用
根据上述多序列激光阴影成像原理,首先在碰撞靶上建立了两序列激光阴影照相系统,获得了弹丸在不同角度撞击靶材时的碎片云阴影图像;每幅图像曝光时间约10ns,序列间隔时间最小为1μs,利用胶片作为图像接收介质。在此基础上,结合光束角放大技术,进一步发展了4序列激光阴影成像系统,其光源参数及序列间隔时间同上,但图像是采用像素为1000万的CCD作为接收介质,获得的图像可见文献[9]。
随着碰撞试验研究的发展,一次试验获得4幅激光阴影图像满足不了要求。为此,在4序列激光阴影成像系统基础上,发展了8序列激光阴影成像系统。通过对光路结构优化,进一步解决了多个光学器件在空间上的布置难题;同时通过光学器件参数的优化选择(如表面镀激光膜层等),基本上解决了杂光的干扰。该系统的发展成功实现了一次试验中获得8幅清晰激光阴影图像,基本上满足了超高速碰撞试验中对弹丸姿态及碎片云发展变化过程的记录需求。
图7为光源系统实物图,由于采用多套独立光源组装完成,占地面积达到了2m2,体积显得过于庞大;图8为光源系统中的扩束系统外观图。

图7 光源系统Fig.7 Light sources system

图8 扩束系统Fig.8 Expanding system
图9为通过8序列激光阴影成像系统在超高速碰撞靶上获得的柱状弹丸撞击靶材的阴影图像,图中弹丸长度为16mm,直径为7.6mm,靶材为厚度2mm的铝板,序列间隔时间为7μs。根据图9(a)中第1和第2幅图像可以得出弹丸在飞行方向的移动量约20.7mm,由于两幅图像时间间隔为7μs,从而算出弹丸的平均速度Vab=2.74km/s,其误差来源主要包括序列间隔时间以及图像的空间分辨率(目前序列间隔时间误差为10ns,空间分辨率为0.15mm)。
在另一种 Whipple屏结构碰撞试验研究中,获得了球形弹丸撞击靶材的序列阴影图像,如图9b所示。该试验参数为:弹丸速度5.07km/s,弹丸直径4.75mm,靶板厚2.0mm,靶材为铝,每相邻图像的间隔时间都为3μs。通过图像处理分析,可以得到碎片云在不同时刻沿弹丸飞行方向的空间位移量,不同时刻碎片云头部特征点宽度大小。
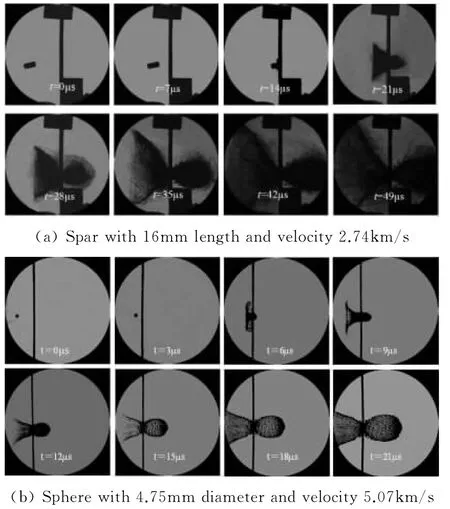
图9 不同条件下获得的序列激光阴影图像Fig.9 Images of sequence laser shadowgraph gotten at different condition
4 结 论
在多序列激光阴影成像技术基础上发展了多序列成像装置,并对超高速碰撞弹丸过程进行了测试,对装置的调试及应用测试结果表明:
(1)成像装置中每一块光学器件的质量都将会影响成像背景的均匀性,特别是扩束系统中扩束镜的任何瑕疵都可能在图像中产生大量衍射条纹;
(2)光路调试中需要结合偏振分光装置不断调整每一个序列光路的偏振方向,以尽量降低不同序列光路的相互干扰;
(3)多序列激光阴影成像技术的发展基本满足超高速碰撞的弹丸姿态和碎片云测量,并为超高速瞬态测量及流场结构显示提供了一种新的可视化测量手段。
[1]林木森,庞宝君,龚海鹏,等.球形弹丸超高速正撞击 Whipple防护结构损伤分析.[J]宇航学报,2009,30(4):1686-1692.Lin Musen,Pang Baojun,Gong Haipeng,et al.Damage of 5A06whipple shield caused by hypervelocity impact of Al2017 sphere[J].Journal of Astronautics,2009,30(4):1686-1692.
[2]迟润强,庞宝君,何茂坚,等.球形弹丸超高速正撞击薄板破碎状态实验研究[J].爆炸与冲击,2009,29(3):231-236.Chi Runqiang,Pang Baojun,He Maojian,et al.Experimental investigation for deformation and fragmentation of spheres penetrating sheets at hypervelocity[J].Explosion and Shock Waves,2009,29(3):231-236.
[3]单宝忠,郭宝平,牛憨笨.多通道门选通纳秒分幅相机[J].光学精密工程,2007,15(12):1963-1968.Shan Baozhong,Guo Baoping,Niu Hanben.Multi channel nano-second framing camera with gate selection[J].Optics and Precision Engineering,2007,15(12):1963-1968.
[4]李剑,畅里华,谭显祥.FJZ-1000型超高速转镜分幅相机及其应用[J].爆炸与冲击,2005,25(6):574-576.Li Jian,Chang Lihua,Tan Xianxiang.Model 1000ultra high speed rotating mirror framing camera and applications[J].Explosion and Shock Waves,2005,25(6):574-576.
[5]李景镇,谭显祥,龚向东,等.超高速转镜分幅摄影时间信息参量测量的研究[J].光子学报,2004,33(7):854-858.Li Jingzhen,Tan Xianxiang,Gong Xiangdong,et al.Studying on time information parameters of ultra high speed framing photography with rotating mirror[J].Acta Photonica Sinica,2004,33(7):854-858.
[6]许家隆.转镜式高速摄影[M].北京:科学出版社,1985:287-293.Xu Jialong.Rotating high speed photography[M].Beijing:Science Press,1985:287-293.
[7]余春晖,李春波,刘春平,等.超高速摄影仪转镜动力学性能的研究[J].光子学报,2011,40(7):1013-1018.Yu Chunhui,Li Chunbo,Liu Chunpin,et al.Dynamic research for rotating mirror of ultra high speed camera[J].Acta Photonica Sinica,2011,40(7):1013-1018.
[8]柳森,谢爱民,黄洁,等.超高速碰撞碎片云的激光阴影照相技术[J].实验流体力学,2005,19(2):35-39.Liu Sen,Xie Aimin,Huang Jie,et al.Laser shadowgraph for the visualization of hypervelocity impact debris cloud[J].Journal of Experiment in Fluid Mechanics,2005,19(2):35-39.
[9]柳森,谢爱民,黄洁,等.超高速碰撞碎片云的四序列激光阴影照相[J].实验流体力学,2010,24(1):1-5.Liu Sen,Xie Aimin,Huang Jie,et al.Four sequences laser shadowgraph for the visualization of hypervelocity impact debris cloud[J].Journal of Experiment in Fluid Mechanics,2010,24(1):1-5.