自整定PID在锅炉汽包水位控制中的仿真应用与分析
2014-11-06李宁
李 宁
( 宝钢集团八钢公司,乌鲁木齐 830000)
0 引 言
火电机组具有强耦合、非线性、大惯性、参数时变和不确定因素的典型复杂热工系统,它具有多个控制量和被控量,具有上述的复杂控制目标和相应的复杂控制任务[1]。在火电机组仿真建模方面,不仅进行理论研究建模(J.P.McDonald,1971 和 K.J.Astrom,1988)[2],也开始了电厂控制对象在线辨识方法研究(如P.K.Chawdhry and B.W.Hogg,1989)[3]。常规的机组控制方案结合前馈补偿、串级等控制策略,采用基于PID线形控制算法的多个SISO反馈控制回路组成的分散控制结构,目前仍在大多数机组中获得广泛应用,但无法保证长时期正常投入运行,只能用来维持生产过程的平稳运行,复杂工况需要运行人员大量的手工操作和监督控制,机组运行参数偏离经济指标较大,造成大量能量损失,增加了设备故障率,严重影响机组的经济效益和安全可靠运行[4]。
为了解决上述控制方法对复杂的锅炉控制系统的不适应性,系统先进和智能控制理论及计算机控制技术开始得到日益广泛的应用,极大地促进了应用非常规设计方法对电厂机组控制系统的重新考察。为了解决常规机组控制系统应用中存在的问题,适应电网综合自动化发展提出越来越度高的性能要求,人们对电厂控制对象及其控制方法进行了广泛深入的研究,提出了许多新的控制策略和设计方法,并在实际应用中取得了较好的试验效果。其中主要有专家控制、模糊控制、神经控制、遗传算法、模型预测控制、自适应或自整定控制方法,以及混合型智能控制方法等[5]。
1 自整定PID控制
1.1 PID参数自整定的概念和发展
PID参数自整定概念中应包括参数自动整定(auto-tuning)和参数在线自校正(self-tuning on-line)。具有自动整定功能的控制器,能通过按键就由控制器自身来完成控制参数的整定,不需要人工干预,它既可用于简单系统投运,也可用于复杂系统预整定。运用自动整定的方法与人工整定法相比,无论是在时间节省方面还是在整定精度上都得以大幅度提高,这同时也就增进了经济效益。早在20世纪70年代,Astrom等人首先提出了自校正调节器,以周期性地辨识过程模型参数为基础,并和以最小方差为控制性能指标的控制律结合起来,在每一采样周期内根据被控过程特性的变化,自动计算出一组新的控制器参数。20世纪80年代,Foxboro公司发表了它的EXACT自校正控制器,使用模式识别技术了解被控过程特性的变化,然后使用专家系统方法去确定适当的控制器参数。这是一种基于启发式规则推理的自校正技术。20世纪90年代,神经网络的概念开始应用于自校正领域[6-7]。
具有自动整定功能和具有在线自校正功能的控制器被统称为自整定控制器。一般而言,如果过程的动态特性是固定的,则可以选用固定参数的控制器,控制器参数的整定由自动整定完成。对动态特性时变的过程,控制器的参数应具有在线自校正的能力,以补偿过程时变。
1.2 PID参数自整定方法
从目前的资料和应用情况来看,PID参数自整定的方法主要归结为三大类:一是辨识方法;二是在线模式识别方法;三是基于知识推理方法。
(1)辨识法
在过去的五十多年中,辨识方法取得了很大的发展,在参数自整定的方法中占主导地位,这与控制理论的发展和人们对控制器的认识有关。获取模型是实现控制的前提,这种观念在五十年代,乃至现在都为广大的控制工作者所肯定。因此,设计控制器必须知道控制对象的数学模型,辨识是有力的工具,这是参数整定最根本的出发点。根据辨识方法和内容不同,可以分为下面两类:一是辨识过程对象的数学模型(传递函数),一是辨识闭环系统的临界增益和临界周期或多点频率特性。
(2)模式辨识法
模式识别的思想根据实际响应波形,抽取出一些能表征系统的特征值,由此来判断系统的动态特性,进而调整控制器参数,即将波形分析与人工智能结合起来,开辟了参数整定的一条新路,实际应用中获得了很大的成功。例如Foxboro公司推出的EXACT控制器及其分散控制系统I/A Series中的PIDE功能模块,采用模式识别的参数整定方法。根据波形可以抽取不同的特征描述量,从不同的角度进行PID控制器的参数的整定。该方法的特点是不用对系统模型进行辨识,节省时间,而且能够适应过程的变化,对于非线性变结构的系统有效。但是,该方法是模仿人的调节行为,即在波形产生以后再作修改,相当于纠正“错误”的过程,而对于实际过程控中这种“错误”是不允许的。因此,该方法在设定参数初值时有一定的危险性。
(3)基于知识推理方法
基于知识推理的PID自整定控制,对模型要求较少,是借助于控制器输出和过程输出变量的观测值来表征的动态特性,而不依赖于一个居间的过程模型,从而具有易于执行且鲁棒性较强的特点。它能综合采用专家经验进行整定,其中启发式规则还可将过程动特性和干扰特性区别开来,并从保持良好的闭环响应特性出发,确定出所需的校正参数。而且基于产生式规则实现控制的系统,其程序设计以逻辑型语句为主,它和以代数型语句为主的辨识法相比较,需要的计算时间较少,所以用于处理较快的运行过程。
但这类方法也存在一些不足,方法的指导原则仍然停留在较弱的理论基础上,它需要丰富的控制知识,其性能的优劣取决于开发者对控制回路参数整定的经验,以及对反馈控制理论的理解程度。另外,如果采用模式识别的方法,当专家系统不具备判断某种模式的知识时,整定后的控制会发散。
总之,由于常规PID控制器不具有在线整定参数的能力,使其不能满足在不同e、ec下系统对PID参数自整定的要求,从而影响到控制效果的进一步提高。本设计将模糊控制与常规 PID控制相结合,利用模糊推理的思想,根据不同e、ec对PID的参数Kp、Ki、Kd进行在线整定,这就模糊自适应整定PID控制器。
2 自整定PID在汽包水位单冲量控制中的应用
根据锅炉控制系统对汽包水位的控制性能的要求,结合总体设计思想,分别对锅炉汽包水位在启动过程中的单冲量控制和正常负载工作时的三冲量控制进行分析和设计,并应用Matlab/Simulink进行仿真分析,其具体实现步骤如下。
2.1 单冲量控制系统结构
单冲量给水自动调节系统如图1所示,它是连续给水自动调节中最简单、最基本的一种模式。水位测量信号经过变送器送到水位调节器,调节器根据水位测量值与给定值的偏差去控制给水调节阀,从而改变给水量保持锅炉水位在允许范围内。因为只采用水位一个信号作调节器的信号,故叫做单冲量水位自动调节。其中Gw(s)=
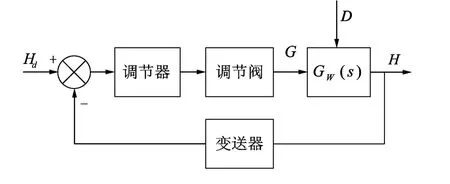
图1 单冲量控制系统结构图
2.2 单冲量控制系统仿真结构图
对图1的系统利用Matlab/Simulink设计系统仿真结构图,其结构如图2,其中subsystem为封装的自整定PID控制器,其结构如图3所示,PID Controller为常规的参数可调的PID控制器,封装结构如图4所示,Manual Switch为手动切换开关,用于在自整定控制器与常规控制器之间切换,step为水位的输入控制信号,step1和step2分别为蒸汽输出量和给水输出量的模拟输入信号。执行机构和阀门的特性系数分别为10和2,用Gain7模拟的比例给水调节阀。
其中被控对象的传递函数分别为:
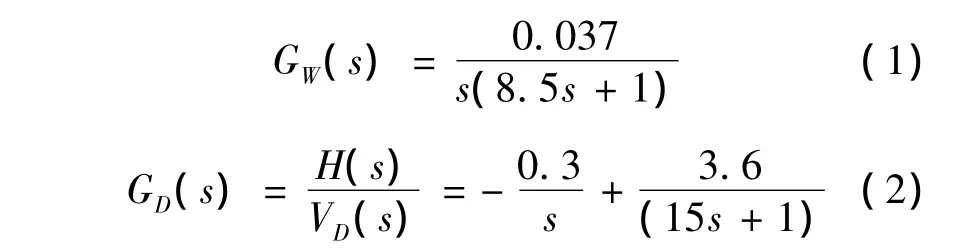
分别为给水流量和蒸汽流量的传递函数。
2.3 单冲量控制性能分析与对比
汽包水位自整定PID模糊控制与常规PID控制仿真比较因上述控制方案仅限于在锅炉启动阶段,即蒸汽发生端的负荷小于20%,暂时将蒸汽扰动和给水扰动的信号忽略。输入信号(step)设置为1,蒸汽流量扰动信号(step1)和给水扰动信号(step2)均设为0,设定仿真时间为1000 s,仿真算法位定步长的四阶龙格—库塔方法,仿真步长为0.5 s。设置Kp、Ki和Kd的参数,运行仿真器,观察结果。其控制性能如图5所示。其中(1)为自整定PID模糊控制器的控制仿真曲线,(2)为常规PID控制的仿真曲线。可见,相对于常规PID,自整定PID不仅缩短了系统的过渡时间,同时也减小了水位输出的超调量,自整定控制器参数整定的曲线如图6、图7和图8所示。
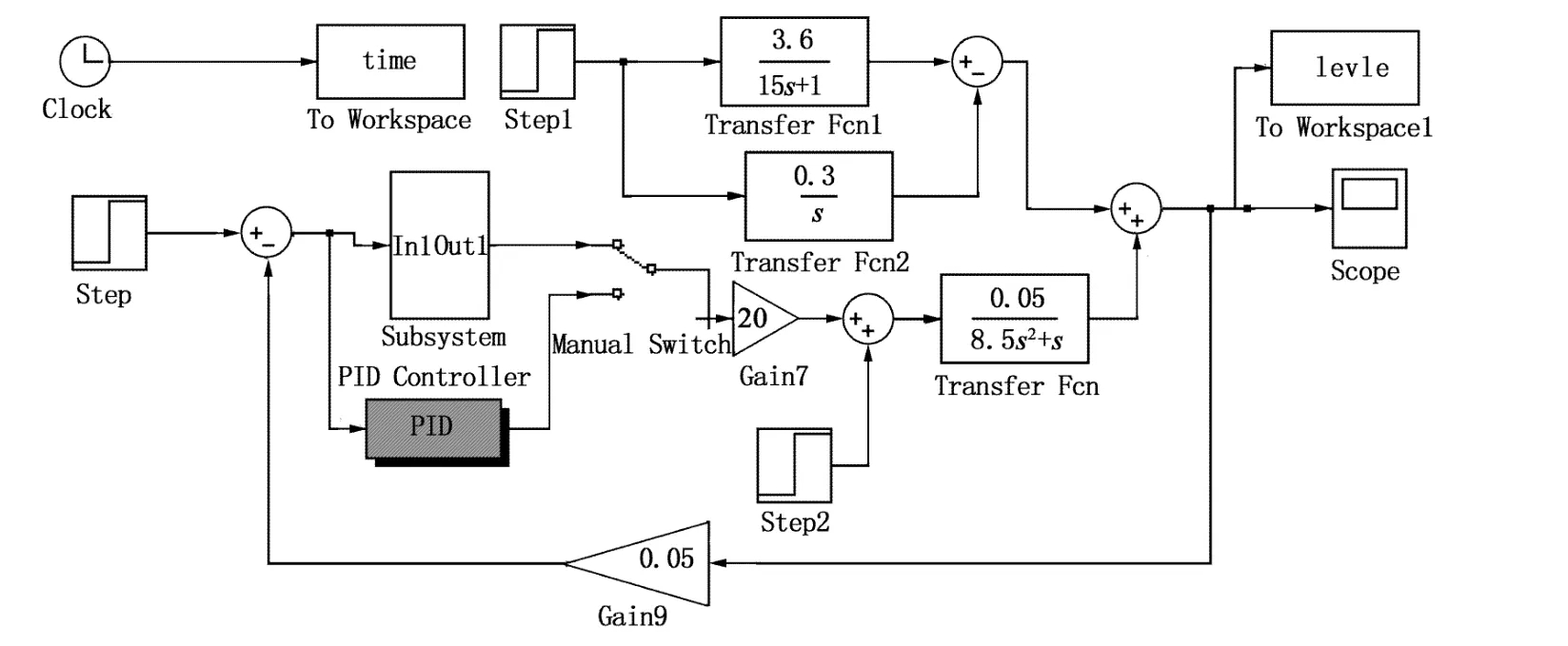
图2 汽包水位单冲量自整定仿真结构图
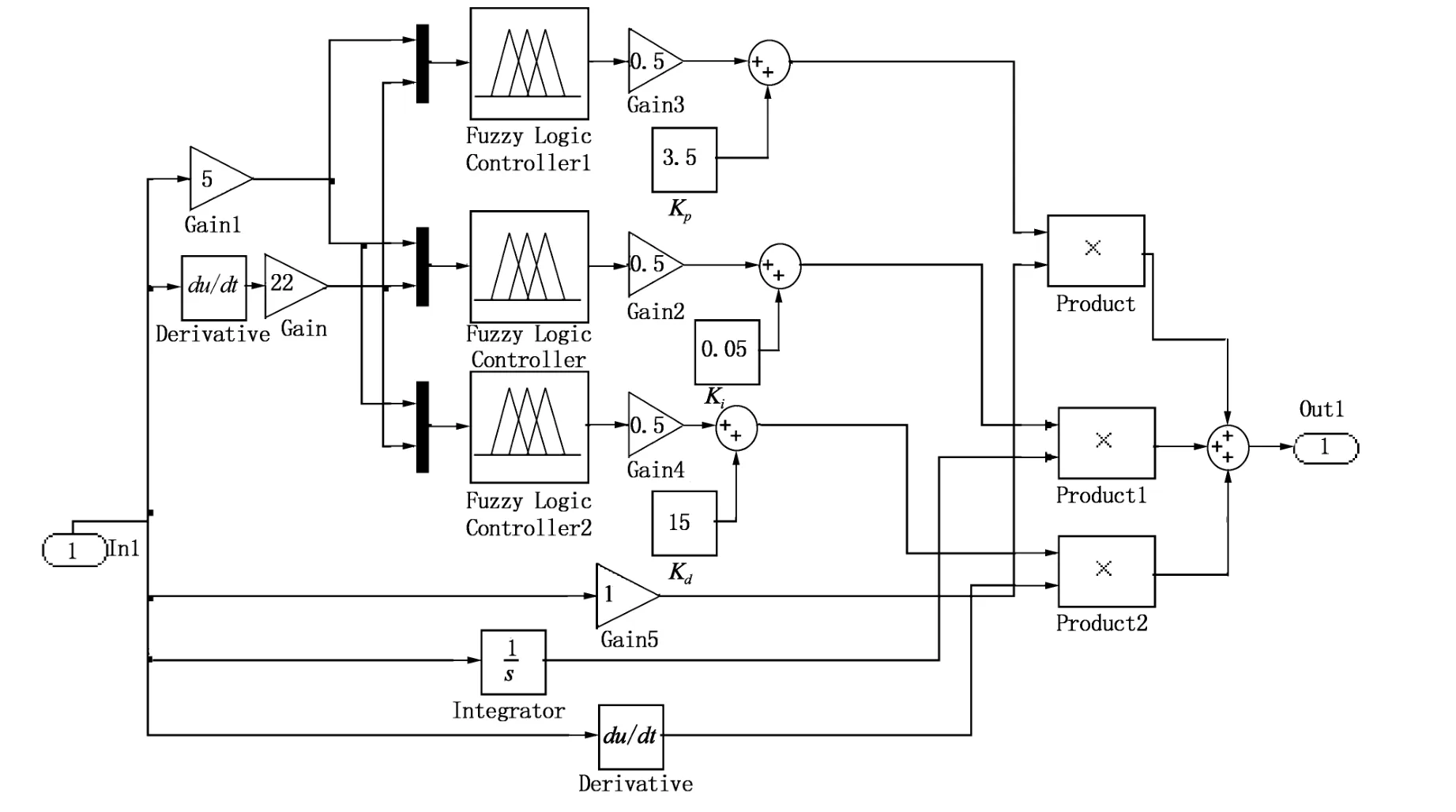
图3 自整定控制器结构图
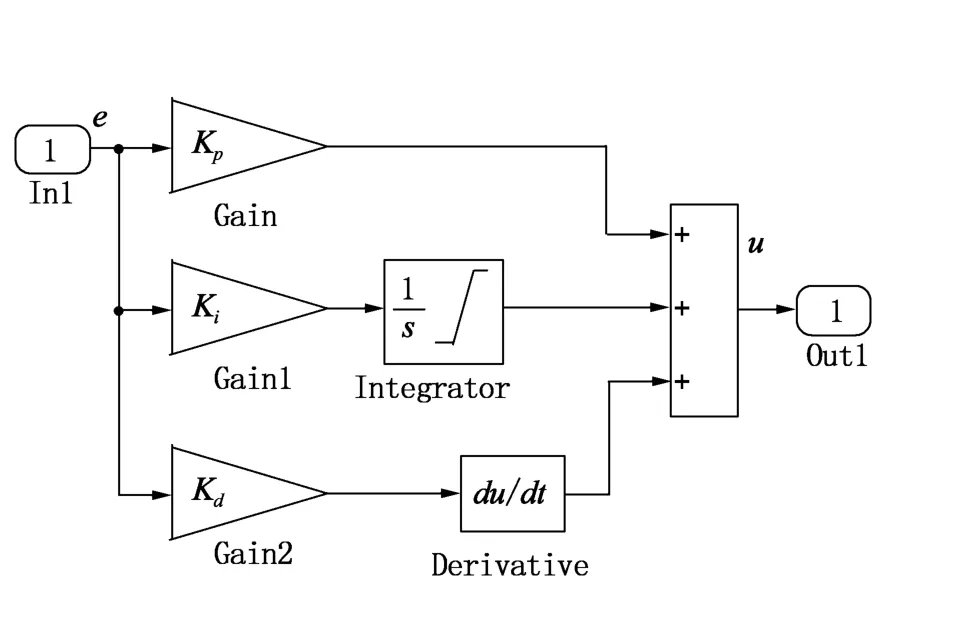
图4 常规PID控制器结构图
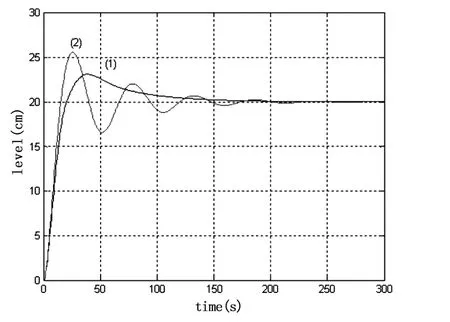
图5 汽包水位自整定PID模糊控制与常规PID控制仿真曲线
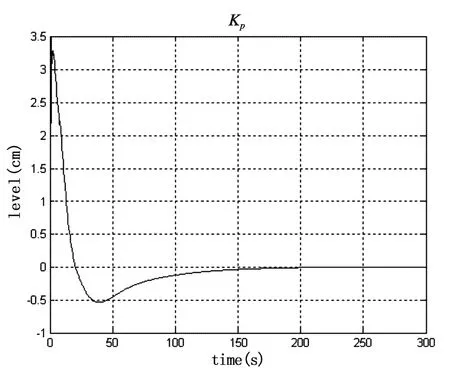
图6 Kp参数整定曲线
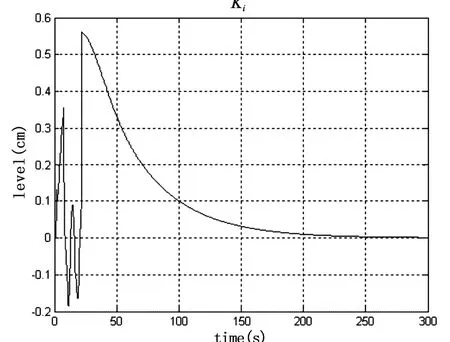
图7 Ki参数整定曲线
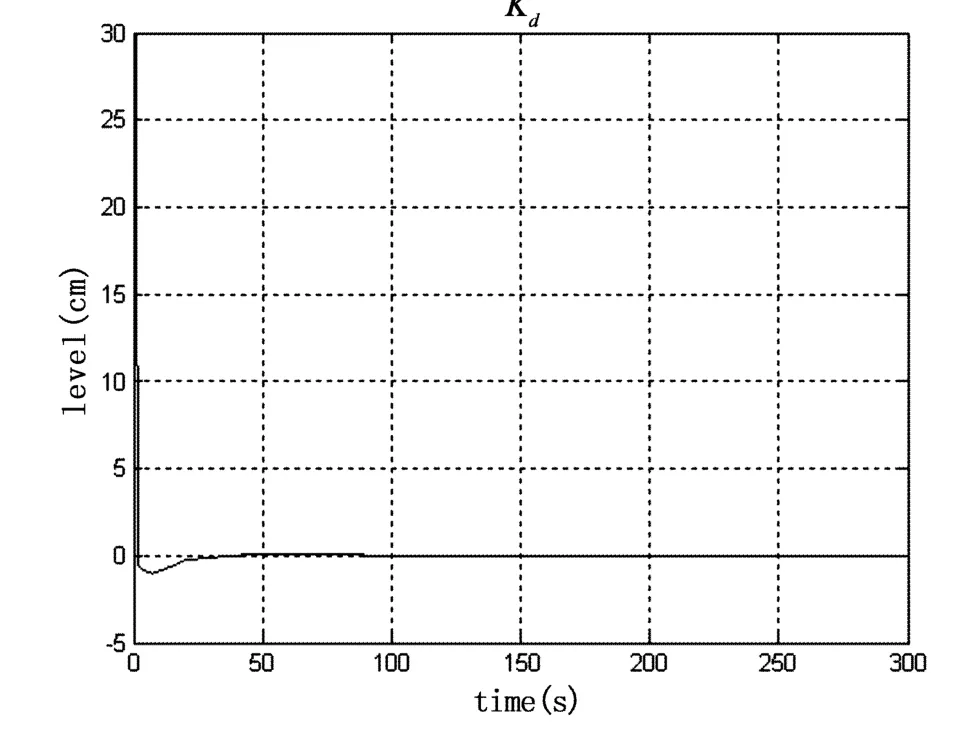
图8 Kd参数整定曲线
通过观察可以知道,在参数的动态整定过程中,自整定控制器根据模糊规则,实现了对控制参数的动态调整,不断按照规则使控制性能达到最优。
(1)汽包水位在给水扰动作用时两种控制方式仿真比较
在各参数均不变的前提下,给系统在t=500 s时加入给水流量外扰动信号 (Step2=5 t/h),此时汽包水位在蒸汽流量扰动下自整定PID模糊控制系统与常规PID控制系统的动态响应曲线如图9所示。
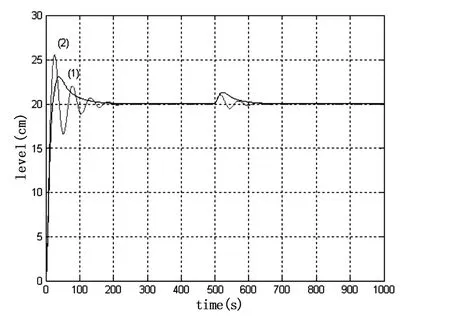
图9 汽包水位在给水扰动作用时两种控制方式仿真曲线
(2)汽包水位在蒸汽流量扰动作用时两种控制方式仿真的比较
在其他各参数均不变的前提下,给系统在t=500 s时加入蒸汽流量外扰动信号(Step1=7 t/h),此时汽包水位在蒸汽流量扰动下自整定PID模糊控制系统与常规PID控制系统的动态响应曲线如图10所示。其中(1)为自整定PID模糊控制器的控制仿真曲线,(2)为常规PID控制的仿真曲线。
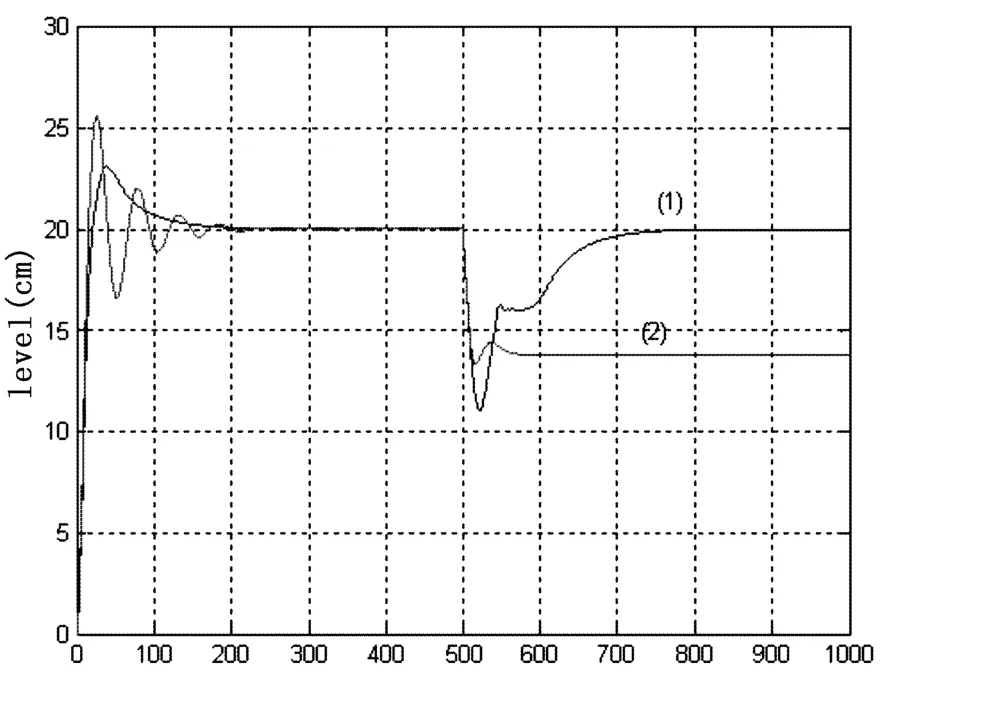
图10 汽包水位在蒸汽流量扰动作用时两种控制方式仿真曲线
通过上述分析,可以知道,相比常规PID控制器,模糊自整定PID在稳定性、动态特性、抗扰性等方面,都有很大的优越性,非常适合汽包水位这样的动态系统。
但是,从单冲量控制器在大范围的蒸汽流量的扰动下的控制特性的分析可以知道,由于存在“虚假水位”的问题,而单冲量控制器对于具有非最小相位特性的蒸汽流量扰动,没有足够的抑制作用。所以,一旦发生流量在大范围内变动,将引起给水调节阀的误动作,致使汽包水位激烈地上下波动,严重影响设备的寿命和安全。从图10中还可以看出,在蒸汽扰动作用下,常规PID控制器在大负荷的作用下,将不能回到原有的水位高度,使控制器失稳,造成严重的后果,而自整定控制器虽然能使水位最终回到初始位置,但调整时间过长,并且水位激烈的上下振动,并不适宜锅炉这样的系统要求。
因此若采用单回路PID控制方式控制汽包水位,而不采取一定措施,则在出现“虚假水位”时,控制系统将会减少汽包进水流量,致使汽包中水量进一步减少。显然,单回路PID控制方式是难以适应汽包水位控制的,为了克服“虚假水位”现象,必须引进更多的控制变量,采用三冲量控制算法,并将模糊控制算法应用于上述控制系统中。
3 结论
在总结模糊自整定PID的控制方案的基础上,通过对余热锅炉汽包水位在各种工作条件下的性能的仿真分析,充分证明了模糊自整定PID控制方案的有效性和可行性。在对于单冲量和三冲量两种不同的控制方案的作用下,模糊自整定控制器同样可以获得良好的控制效果,尤其对于时变的控制系统,其优越性更加显著。同时,通过对模糊自整定控制器稳定性的分析,可以知道,该模糊控制器对于所研究的对象而言,是稳定而有效的。
针对对象参数未知的控制对象,模糊自整定PID控制有其独特的优点,可以根据实时的系统响应做出不同的参数调整。目前在温度、水位等系统中的应用比较广泛。但是,由于规则的有限性和控制器设计人员的主观性,模糊自整定控制器也有其不可以避免的局限性,一旦对象响应中出现规则没有的情况,将使控制性能极大下降。作为一种刚刚兴起的先进智能控制方案,模糊自整定PID有着广泛的应用空间和前景,其性能也有待进一步的提高。
[1]Mcdonald J P,Kwatny H G.A nonlinear model for reheat boiler-turbine-generator system[J].Part 1-general description and evaluation,Part 2-development.Proc.JACC,1971:219 -236.
[2]Astrom K J,Hagglund T,Hang C C.Automatic tuning and adaptation for PID controller - a survey[J].Control Engineering Practice,1993:9 -23.
[3]Chawdhry P K,Price B H.The controllability of steam output,pressure and water level in drum boilers[J].Proc I Mech Eng,1997:75 -84.
[4]董红生.PID控制器的参数自动整定方法的研究[D].兰州:兰州理工大学,2002:5 -6.
[5]孙林军,智能PID控制研究[D].杭州:浙江工业大学,2003,5:2 -11.
[1]夏 红.PID自整定方法综述[J].浙江科技学院学报,2003(15)4:237-240.
