令人机和谐的罗尼·阿伯维茨
2014-10-31马君海
马君海
美国朋友约翰来京探望女友,一呆数月,没有任何归队的意思。“不怕老板炒了你?”约翰嘿嘿一笑说:“我和老板天天见面呢!我每天通过公司购买的一个远程现身机器人向老板报到,与老板开会,老板没有觉得我远在万里之外有什么不方便。”
天涯咫尺
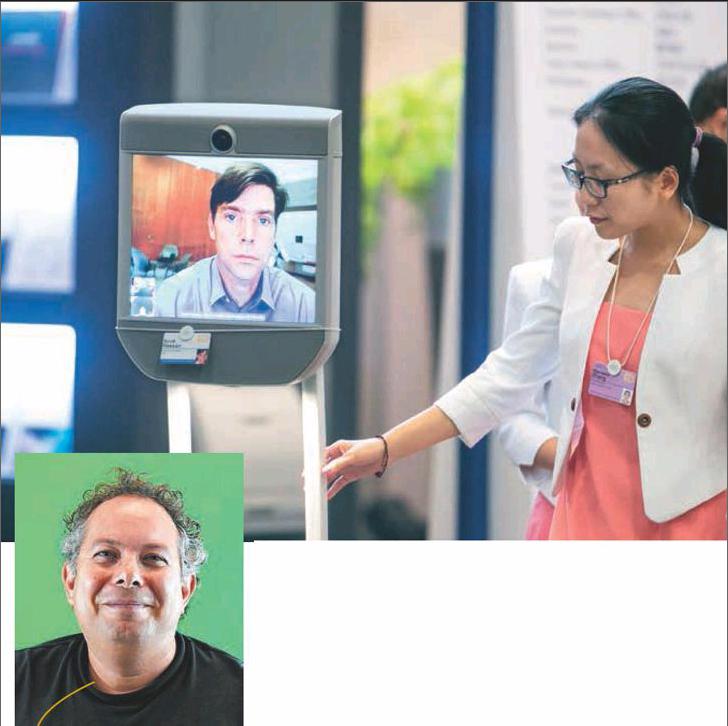
原来约翰供职的公司叫魔跳(Magic Leap Inc.),研发机器人技术的。老板罗尼·阿伯维茨(Rony Abovetz)是38岁的犹太裔美国人,十足的机器人迷,特别有故事。罗尼有迈阿密大学机械工程学和生物工程学的学位,与人共同创办的魔跳公司有两个办公地点:美国西海岸的硅谷和佛州达尼亚海滨。罗尼分别为两个地点配置了BEAM远程机器人现身系统。这是一个可以代替真人现身在遥远地方的机器人——就是一台可移动的支架,顶部配有一块17英寸的液晶屏,屏幕上显示着你的脸。带动“你”“走路”的这个支架高1米57,差不多是西方男性站姿和坐姿之间的高度,当你的同事看到了“你”,他可以和“你”打个招呼,亲热地用拳头碰碰“你的脸”——那块17英寸的屏幕。同事与“你”边走边聊, 最后还一起来到会议室开会。一路上,“你”身上安装的广角镜头可以帮你避免磕磕碰碰。?
今年6月,当魔跳的佛州办公区搬入新装修的区域时,罗尼对设计公司的要求是,办公区域一定要能够体现“魔跳的创新灵魂”,让他的那些计算机天才和鬼才时时沟通不受任何限制,头脑里随时“闪电”,“风暴”可随时爆发,办公空间可随时扩展。总之,新的办公空间要能够呈现魔跳公司对未来的设想,这个未来可能是几个月,也可能是几年。罗尼说“要让旁边的最高档的酒店和娱乐场所极度眼馋”。
新的办公系统可以让在东部和西部的员工同时开会,远程现身机器人的效率大大优于微软的SKYPE以及谷歌和思科等公司提供的固定桌面视频会议系统,真正做到了“不受地域限制”的理想。员工可以在家办公,可以在旅行的远方参加总部的重要会议,从而缩减为了参会而购买机票和安排住宿的费用。
罗尼工作时一般不回短信,也不接电话, 但因为BEAM没有上肢,“员工只好操作机器人猛击我办公室的门, 而我又不得不去开门,门一开,‘他们蜂拥而至。”说到此,罗尼脸上的不是愠怒,而是洋洋得意。
创业狂人
作为共同创始人,魔跳是罗尼的第三次创业。第一次创业的K- KAT是一家制作外科手术导航装置的公司,创建于1995年。10年后,MAKO Surgical公司成为罗尼的第二次尝试,罗尼依靠K-KAT打下的技术和实验的基础,MAKO最后卖给了Stryker,成交价16.5亿美元。罗尼本人的背景是矫形学和心血管移植开发,包括接入医学机器人和计算机辅助技术。尽管低调,网络上甚至很难找到罗尼的相片,但罗尼也还是被业界和经济界高度关注。2005年,世界经济论坛(WEF)承认罗尼在计算机辅助微创手术技术的卓越贡献,选他为该年度论坛的“技术先驱者”。当年,约翰从麻省理工取得学位后,放弃谷歌、亚马逊、苹果等头号大牌公司的高薪聘请,直奔罗尼而去,可见罗尼的个人魅力。
罗尼历来在意想不到的地方来事。他说,科技是魔术师,可以让世界千变万化;人的大脑是最好的展示厅,只有想不到的,没有做不到的。因此,一个龙飞凤舞、独角兽、蓝精灵和仙女成群的世界才是人类的理想世界;与其让机器聪明,不如让“人”更聪明。魔跳成立于2012年,其使命是开发用新型穿戴设备实现世界上最自然最友好的人机交互体验,并使之商业化。这当中,计算机技术遭遇生物学,人的身体和大脑随时做出不同反应,魔跳就是要让真正魔怪的体验成为可能。在这个罗尼设想的新世界里,人的感官系统与计算机之间应当保持亲密的关系。而魔跳的任务是将自己的专有技术用于满足未来用户的需要。
触觉难题
机器人在力量和精确度上超过人类,甚至在与人类斗智斗勇方面取胜。但是作为进化了数百万年的人类,也还有很多本领在机器人身上难以实现——触觉就一直是影响机器人取代人类的最大障碍。人类拥有一系列的器官,可以精确地感知压力、冲力、温度和震动。研究显示,人类触觉的精密程度比之前所认为的高出好几个数量级。瑞典科学家在《自然》杂志上刊文称,人体的动态触觉,如当手指划过表面时的触觉可以区分出高度不超过13纳米的凸起,也就是0.0000005英寸,这相当于一个分子的大小。按照瑞典皇家理工学院表面化学教授马克鲁的解释,假设人的手指放大到地球般大,它就可以感觉出一辆汽车和一栋房子的大小差异。生理学家也说,手指与各种表面之间的互动可以被一种名为“机械感受器”的器官探测到,这种器官可以植根于人体皮肤的不同深度中,有些能感受到物体的尺寸或形状变化,还有的可以感受到震动。具体到细微的表面震动,关键信息源自帕氏小体,这是一种长约1毫米的椭圆形结构,可以在形状改变时发出信号。触觉学的目标就是复制这种敏感性,这门学科在计算世界与人类相联系的过程中相当重要。
去年秋天,斯坦福大学机械工程学教授阿里森在网上讲授触觉学:“如果面对你拥有所有的感觉,诸如视觉、听觉、味觉、触觉和嗅觉,在有人意欲逐一将其夺走时,你最不情愿放弃的是哪一种?几乎所有同学的回答都说是视觉,但我的答案是触觉。”
罗尼对此很清楚,他在研发过程中将复制触觉的灵敏度设为自己解决人机交互体验的目标之一,并表示愿意为此贡献毕生的精力。罗尼的第二家公司MAKO发明的机器人可以在外科医生为患有关节炎的膝关节患者做修复手术过程中提供精确反馈,大大提升了触觉学的研究高度。
实验的原理是:由MAKO机器人主导这个膝部微创修复手术,计算机软件系统依照术前CT扫描,生成一个患者膝盖的三维模型,让真人外科医生决定从胫骨和腿骨上取出多大量的骨头植入关节发炎的部位。真人医生不是用眼睛直接去观察和操作,而是由MAKO系统来指挥他完成手术,术中动用机械手臂,也是由MAKO主导。在MAKO扫描规划区域之前,真人医生几乎无事可做。如果真人医生操作了规划区域以外的部分,MAKO的触觉反馈将会给出一定的阻力,如果手术医生坚持其操作,那么警报就会响起,整个系统自动关闭。这个设计可以保证手术医生尽量减少膝关节和其他组织的创伤。
安德鲁作为矫形外科医生和纽约市计算机辅助外科中心的共同创始人,多次在MAKO的帮助下完成了部分膝盖的置换手术。他认为,这种手术如果用眼睛观察手动完成难度相当大。但如果用上MAKO,则手术可以获得精确指导,因而变得异常容易。MAKO在整个手术过程中追踪整个腿部的位置,一般情况下,在替换膝盖骨骼的时候,腿是不能动的,因为外科医生需要时时调整时时测试,确信那个要换的肌肉骨骼系统是同轴的。在其他用于患者手术的机器人系统中,包括在欧洲使用的髋关节替换系统,因为要直接钳制骨头进行切割,在这个过程中解决不了腿部运动的问题。而由于MAKO相对于骨骼并不固定,所以它可以继续为其导向,这样的话,哪怕病人的腿部尚在运动,手术亦可进行,红外摄像机可以通过追踪机器人确定底座和骨骼的位置。外科医生很喜欢MAKO系统,“这是真正意义上的机器人协助,因为它能够精确地限制外科医生的不规范动作。”
罗尼最看重将机器智能与人类智能相结合,各自去做他们所擅长的事情,他把这比喻为“有趣的共生关系”。比如在手术中,“外科医生仍然拥有控制感,可以将精力投入到动作和力道上。但所有的智能引导任务,以及外科医生的常规活动,都是由机器人完成的。”