三维激光扫描仪在墙面平整度检测中的应用
2014-10-28程效军
李 杰,程效军,2
三维激光扫描仪在墙面平整度检测中的应用
*李 杰1,程效军1,2
(1.同济大学测绘与地理信息学院,上海 200092 2.现代工程测量国家测绘地理信息局重点实验室,上海 200092)
建筑物墙面平整度是房屋质量检测和验收的重要指标之一,利用地面三维激光扫描仪可以快速检测墙面平整度。根据扫描仪获得的点云加入Huber选权迭代法对墙平面进行最小二乘拟合,可有效地抵抗粗差的影响,从而得到最佳平面。再根据各点到拟合平面的距离判断墙面的平整度,并将距离按照阈值赋予不同颜色,直观地反映墙面的平整情况。
三维激光扫描;平整度;选权迭代法;平面拟合
0 引言
建筑墙面平整度是指墙体表面凹凸不平及厚薄不均的程度。在建筑物施工、验收和变形观测等方面常常需要确定墙面平整度[1]。在施工过程中,墙体表面平整度检测对后续墙面涂饰、粉刷等工程具有重要影响,并且直接决定了墙面最终的平整情况。在建筑物竣工验收阶段,墙面平整度也是检测的重要指标之一。
传统的墙面平整度检测通常采用2米靠尺与楔形塞尺进行(如图1所示)。首先选取待检测墙面,将靠尺紧靠该墙面,将楔形塞尺游码推到靠尺顶部,然后将该楔形塞尺的顶部插入靠尺与待检测墙面间的缝隙,读取游码刻度(单位为毫米),该数值即为平整度偏差。若靠尺与待检测墙面之间的平整度偏差大于工程规范要求,则将该检测点记为不合格点,最后根据不合格点占总检测点的比率确定建筑物表面平整度是否合格[2-3]。
传统的墙面平整度检测工具除了2米靠尺与楔形塞尺外还有白炽灯、全站仪、红外水平检测仪等。在光线较暗的条件下,利用白炽灯贴着待检测墙面进行照明,若出现阴影区域则墙面存在凹凸不平的现象。该方法只能大致确定墙面不平整区域,无法获得具体的平整度数值。利用全站仪可以测出墙面上待检测点的坐标,对这些点进行平面拟合后可以得到墙面的近似平面方程,根据坐标点到平面的距离可以判断出墙面的平整情况。该方法选取的检测点具有主观性,不能全面、详实地反映墙面的平整度。而使用红外水平检测仪检测时,在待检测墙面上均匀选择数个检测点,并用卷尺测量标高,再打开红外水平检测仪的水平线,查看每个标高点的数值是否相同。若相同,则墙面平整,否则墙面不平整。该方法操作复杂且精度不高。

图1 采用两米靠尺和楔形塞尺检测墙面平整度
在现代建设项目中,时间成本和人工成本越来越高。从上面的分析可知,传统的检测方法由于效率低、精度不高、操作不便、数据有限等局限性而不适用于大范围的墙面平整度检测。而使用地面三维激光扫描仪优势凸显:速度快,不需要接触被检测物体。它可以快速获取大量的墙面点云数据,节约现场作业时间[4-7]。海量数据可以详细准确地评定墙面的整体平整情况。由于作业过程中不需要接触被测墙体,从而极大地方便了施工阶段的墙面检测。
1 三维激光扫描仪检测墙面平整度的方法
通过三维激光扫描仪对待检测墙面进行扫描,获得大量墙面点的三维坐标。选取其中不共线的三个点求出初始平面方程。然后按照间接平差原理,列出各点观测值的误差方程式,组成法方程,解出平面方程的系数改正值,从而得到墙面的拟合平面方程[8-9]。由于扫描过程中存在一定的粗差,会影响墙面拟合的精度,因此本文采用Huber选权迭代法进行平面拟合,以抵抗粗差的影响,获得较为精确的墙平面。权函数如式(1)所示[10]。

式中,为权阵的对角线元素;为第个观测值的残差;为常数项;为单位权中误差。由Huber权函数可知,当残差在之间时,Huber估计就是经典的最小二乘估计。当残差的绝对值大于时,权与残差成反比,残差越大,权越小,与此相对应的观测值对参数估计的影响也越小。通过迭代计算使含粗差观测项的权值不断降低,从而抵抗粗差的影响。当相邻两次计算的改正数变化在5%以内时,迭代停止,求出最佳拟合平面。最后计算各点到该拟合平面的距离,并将距离按照大小赋予不同的颜色,直观地反映墙面整体的平整情况。本文检测方法的流程图如图2所示。
平面拟合步骤如下:
Step1假设墙面上任选的三点坐标为:

则由这三点可构成初始平面方程:

Step2 设由墙面点拟合的平面方程为:

根据间接平差原理[11],每一个墙面点观测值的误差方程为:
(4)


Step3 计算法方程为:



其中,为坐标点数。
Step7 采用新的权阵重复Step3-7,当相邻两次计算的变化小于5% 时,迭代停止(初始计算权阵取为单位阵)。
Step8 平面方程式(3)经过平差后的系数为:

Step10 最后计算墙面平整度:
2 实例分析
实验采用FARO Focus 3D地面三维激光扫描仪分别对面砖材质和抹灰材质的墙面进行扫描。由于扫描仪获得的原始数据是海量的离散点云数据,其中包含了大量的粗差、系统误差和冗余信息,因而不能直接使用[12]。本文利用点云处理软件FARO SCENE,采用人机交互的方式将原始点云数据中的无关信息剔除,并导出处理后的xyz坐标文件。利用Matlab编程处理,对墙面坐标采用选权迭代法进行拟合,获得精确的墙平面方程以及每一点到该拟合平面的距离。最后根据这些距离进行墙面平整度的计算和分析,并将距离按照阈值进行着色,直观地反映墙面的平整状况。
2.1 面砖墙面平整度分析
面砖墙面一共采集了19,740个点,采用本文前面介绍的方法得到墙面的拟合平面方程为:

图3为墙面点到拟合平面的距离分布图,图4为距离分布的统计直方图。
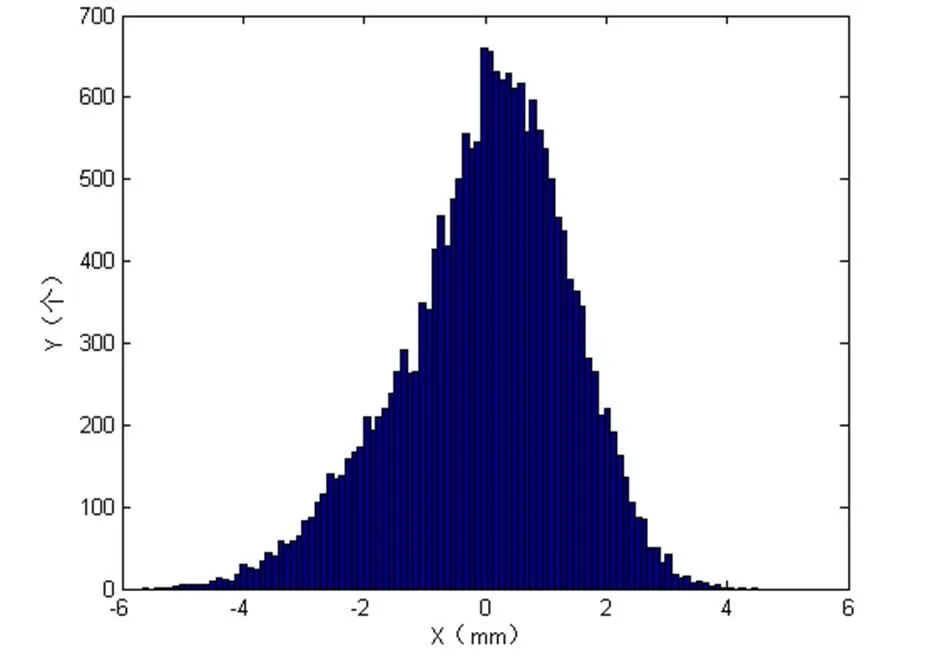
图4 距离分布统计直方图
根据距离分布统计直方图可得,点到平面的距离近似地服从正态分布。距离最大值为4.5066 mm,最小值为-5.6644 mm。其中,距离小于1.5 mm的点有14318个(占72.53%),距离在1.5~3 mm之间的点有4763个(占24.13%),距离大于3 mm的点有659个(占3.34%)。如图5所示为面砖墙面的平整情况。由计算结果可知,该墙面的整体平整度为1.4 mm。根据《建筑装饰装修工程质量验收规范》(GB50201-2001)[13]规定,面砖工程的表面平整度要求为3 mm,因此该墙面的平整度符合规范要求。

图5 面砖墙面平整情况分布图
2.2 抹灰墙面平整度分析
抹灰墙面一共采集了20,812个点,拟合的墙面平面方程为:

如图6所示为墙面点到拟合平面的距离分布图,图7为距离分布的统计直方图。

图7 距离分布统计直方图
根据距离分布统计直方图可得,点到平面的距离近似地服从正态分布。距离最大值为8.0894 mm,最小值为-11.6534 mm。其中,距离小于2 mm的点有11506个(占55.29%),距离在2~4 mm之间的点有7098个(占34.10%),距离大于4 mm的点有2208个(占10.61%)。如图8所示为抹灰墙面的平整情况。由计算结果可知,该墙面的整体平整度为2.5 mm,不及面砖墙面的平整度。根据《建筑装饰装修工程质量验收规范》(GB50201-2001)[13]规定,普通抹灰墙面的表面平整度要求为4 mm,高级抹灰墙面的表面平整度要求为3 mm。因此该墙面的平整度符合规范要求,但在局部区域存在粗糙度较大的情况,可能由于施工误差或墙面损坏引起。

图8 抹灰墙面平整情况分布图
3 结语
地面三维激光扫描仪应用于墙面平整度检测较传统的检测方法具有明显的优势,它可以快速获取大量的墙面点,在FARO SCENE中经过点云去噪后,导出坐标点的xyz文件,加入选权迭代法进行最小二乘平面拟合,以抵抗粗差的影响,从而得到最佳墙平面拟合方程。通过计算各个墙面点到拟合平面的距离可以判断出墙面的平整情况。通过计算距离的单位权中误差可以得到墙面的平整度。该方法检测速度快、精度高,除了可以确定墙面的整体平整状况外,还可以确定不平整区域的位置,为施工质量控制和验收提供了便利。若采用Riegl VQ-250全景扫描仪,则该方法不仅可以检测墙面平整度,还可进一步推广到天花板和地面的平整度检测。
[1] 程效军, 顾孝烈, 顾振雄. 测量工程LISP程序设计[M]. 上海:同济大学出版社, 2012: 8-19.
[2] 李兴弟. 关于现浇混凝土板, 墙柱平整度, 垂直度的控制[J]. 建材与装饰, 2011 (5): 208-209.
[3] 任海军, 何涛, 朱继胜,等. 建筑表面平整度检测方法[P]. 中国: CN102538739A, 2012-07-04.
[4] 宋宏. 地面三维激光扫描测量技术及其应用分析[J]. 测绘技术装备, 2008, 10(2): 40-43.
[5] Buckley S J, Howell J A, Enge H D, et al. Terrestrial laser scanning in geology: data acquisition, processing and accuracy considerations[J]. Journal of the Geological Society, 2008, 165(3): 625-638.
[6] 戴升山, 李田凤. 地面三维激光扫描技术的发展与应用前景[J]. 现代测绘, 2009, 32(4): 11-12.
[7] 谢武强, 宋杨, 王峰,等. 三维激光扫描仪在建筑物立面测量中的应用[J]. 城市勘测, 2013 (1): 12-14.
[8] 程效军, 刘晓明, 高明. 利用无协作目标电子全站仪对建筑物立面进行检测[J]. 铁路航测, 2003(4): 30-32.
[9] 程效军, 唐剑波. 基于最小二乘拟合的墙面平整度检测方法[J]. 测绘信息与工程, 2007, 32(4): 19-20.
[10] 陈西强, 黄张裕. 抗差估计的选权迭代法分析与比较[J]. 测绘工程, 2010, 19(4): 8-11.
[11] 王穗辉. 误差理论与测量平差[M]. 上海:同济大学出版社, 2010:20-30.
[12] 李伟, 刘正坤. 地面三维激光扫描技术用于道路平整度检测研究[J]. 北京测绘, 2011(3): 24-27.
[13] GB50201-2001, 建筑装饰装修工程质量验收规范[S].
Wall Flatness Detection By Terrestrial Laser Scanning
*LI Jie1, CHENG Xiao-jun1,2
(1.College of Surveying and Geo-Informatics, Tongji University, Shanghai 200092,China; 2.Key Laboratory of Advanced Engineering Survey of State Bureau Surveying and Mapping, Shanghai 200092,China)
The level of wall flatness is one of the key indexes for building detection and acceptance. A method for wall flatness detection by terrestrial laser scanning is presented. The coordinates collected by the scanner were fitted by least square with Huber selecting weight iteration method according to the principle of parameter adjustment, which could weaken the influence of errors, and the finest plane could be fitted. Then the flatness of the wall could be estimated by computing the distances from every point to the fitted plane. Furthermore, the distances were colored by threshold values which can reflect the overall level of flatness explicitly.
3D laser scanning; flatness; selecting weight iteration method; plane fitting
P221
A
10.3969/j.issn.1674-8085.2014.04.003
1674-8085(2014)04-0013-05
2014-02-09;
2014-03-11
国家科技支撑计划重点项目课题(2013BAK08B07)
*李 杰(1988-),女,江苏南通人,硕士生,主要从事地面三维激光扫描研究(E-mail:exelero9@hotmail.com);
程效军(1964-),男,江西乐平人,教授,博士,主要从事精密工程测量与地面摄影测量研究(cxj@tongji.edu.cn).
