具有LQG 控制器的主动悬架整车模型动力学分析与仿真研究
2014-10-28张海涛王治平王云霞王小龙
张海涛,王治平,王云霞,王小龙
具有LQG 控制器的主动悬架整车模型动力学分析与仿真研究
*张海涛,王治平,王云霞,王小龙
(安徽机电职业技术学院汽车工程系,安徽,芜湖 241000)
基于达朗贝尔原理建立整车主动悬架动力学模型,采用最优控制理论进行主动悬架LQG控制器设计。在Matlab/Simulink中建立相应的系统仿真模型,采用积分白噪声模型作为路面输入形式,然后结合整车系统仿真模型进行该系统动态特性仿真,并将主、被动悬架特性进行对比分析。仿真结果表明,相对于被动悬架主动悬架性能有明显改善。
主动悬架;最优控制;LQG控制器
随着现代控制理论及其控制技术的不断发展,人们对汽车性能要求越来越高,尤其是其行驶平顺性和操纵稳定性。而悬架系统设计的好坏与其息息相关,现在对于汽车悬架的研究已经成为一个热门,越来越受到汽车研究者的青睐[1]。
在汽车悬架研究中,各种控制算法被广泛的研究。但是大多是相对于二自由度1/4车体模型或者是半车模型,相对于整车模型的研究还不是很广泛。在研究1/4车体或半车模型时不能很好地反应汽车的实际情况[2-5]。
本文在半车模型研究的基础上对整车模型进行研究和分析,整车模型相对于半车模型可以更贴近实际情况。通过对整车模型主动悬架的动力学建模、悬架系统的LQG(Linear Quadratic Gaussian distributed)控制器的设计、整车模型参数的选择和动态仿真平台的建立以及仿真结果的对比分析与研究,发现通过LQG控制器的设计可使汽车在不平路面的激励作用下其行驶平顺性和操纵稳定性以及安全性的要求有较好的改善。对于主动悬架控制系统的研究具有重要意义[6-7]。
1 主动悬架的整车模型建立
汽车整车模型主动悬架模型如图1所示。在图中ms—整车车体质量;JΦ—俯仰转动惯量;xc—车体质心位移;Jθ—侧倾转动惯量;Φ—俯仰角度;θ—侧倾角度;L—前后轴之间的距离;b—前轴到质心的距离;B—汽车两轮之间的距离;a—汽车轮胎到质心的距离;ks1~ks4汽车前后左右四个悬架的刚度系数;cs1~cs4汽车前后左右四个悬架的阻尼系数;xt1~xt4汽车前后左右四个悬架的非簧载质量的位移;xr1~xr4汽车前后左右四个轮胎的地面扰动输入位移;kt1~kt4汽车前后左右四个轮胎的刚度系数;u1~u4汽车前后左右四个悬架控制器的控制力;mt1~mt4汽车前后左右四个悬架的非簧载质量。

图1 整车模型主动悬架系统
Fig .1 entire vehicle model of active suspension
根据达朗贝尔原理可列出整车模型主动悬架动力学运动微分方程,其中式(1)为整车车体质心运动微分方程,式(2)为俯仰角运动微分方程,式(3)为车身侧倾角运动微分方程;式(4)~式(7)前后左右四个悬架非簧载质量的运动微分方程,车体前后左右四个端部直接的空间关系式如式(8)[2,6]。







现假设:

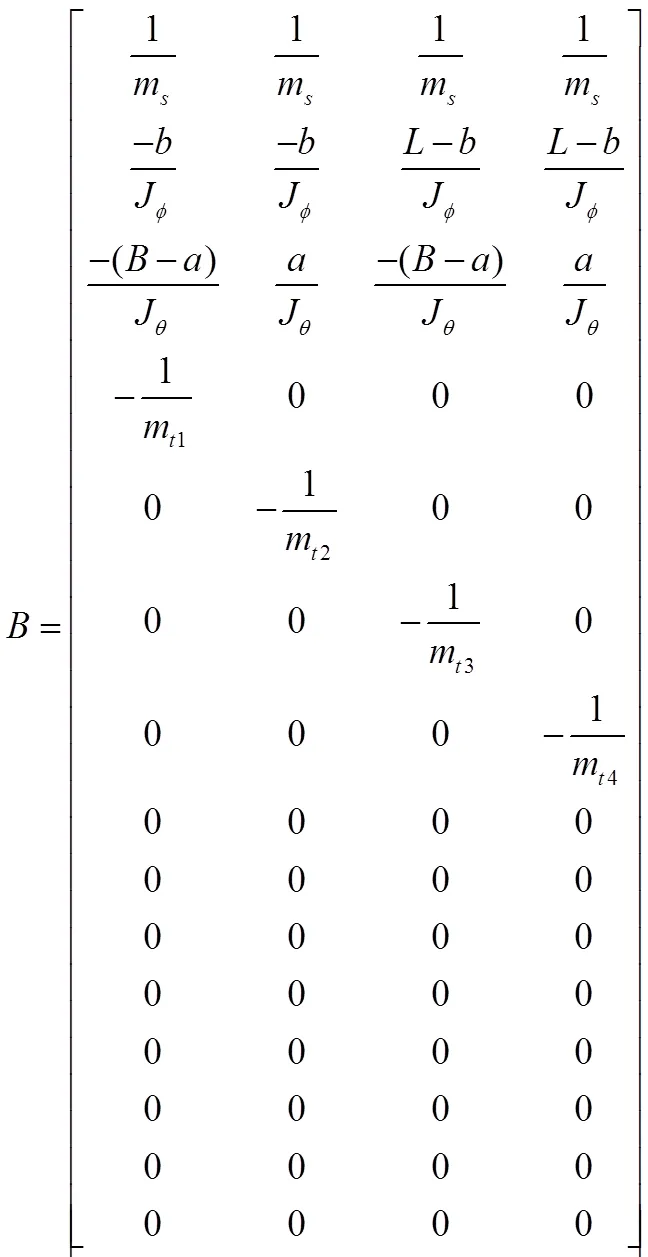

输出矩阵方程如式(10):

其中:

2 汽车悬架LQG控制器的设计
在研究汽车相关性能时,汽车悬架性能的好坏直接与其行驶平顺性和乘坐舒适性相关。相关参数主要体现在车身加速度、悬架动挠度和轮胎动位移等方面,因此在整车模型主动悬架设计方面主要以其轮胎动位移、悬架动挠度和车身加速度的加权平方和的积分作为其主要性能指标的体现(11)式[6,8]:
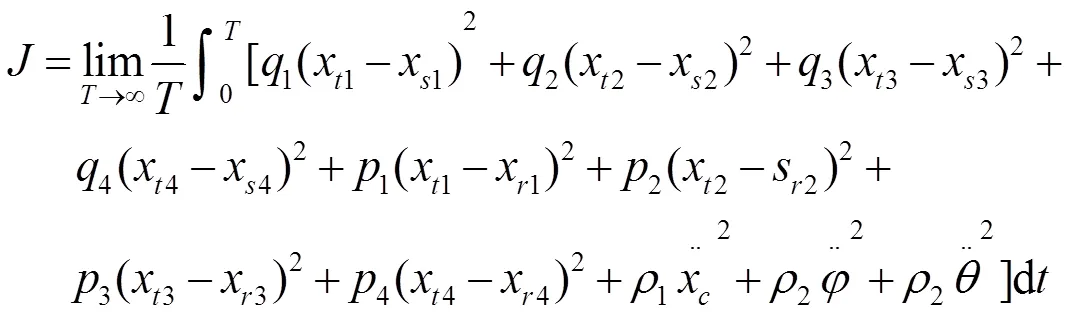
把式(11)变换成矩阵形式,可得式(12):

式中为状态正半定矩阵,为控制正定矩阵。
根据二次型性能指标的线性系统最优控制理论,可以得到悬架系统的最优控制规律[6]:

式中K—反馈增益矩阵。矩阵P由黎卡提方程求出:

3 主动悬架控制器的软件实现与仿真
根据最优控制求法得到整车主动悬架系统的控制器U,其控制力求解如式(15)所示[9]:
在MATLAB/SIMULINK中,依据参考文献[7,10]的建模过程来完成其整车模型主动悬架的仿真建模过程,主要依据式(15)建立控制器模型,式(4)~式(7)前后左右四个悬架非簧载质量模型,式(1)建立整车质心处的垂向运动仿真模型,式(2)建立车身俯仰运动微分方程的仿真模型,式(3)建立车身侧倾运动微分方程的仿真模型,式(8)建立四个端点的空间关系仿真模型。把上述仿真模型组合起来就完成了整车模型主动悬架系统的建模过程。取某车型参数,地面输入模型为积分白噪声模型。把所有参数代人矩阵A、B、Q、R和N中,调用MATLAB中的LQR函数,其基本格式为[K]=LQR(A,B,Q,R,N)。可分别得到车体加速度仿真曲线图2,前后左右四个悬架动挠度仿真曲线图3,前后左右四个轮胎动载荷仿真曲线图4。
通过对图2~图4某车型被动悬架和主动悬架性能指标的仿真结果对比分析,可发现主动悬架系统相对于被动悬架系统在相关性能指标方面都有所改善。但有些则不是很明显,而且通过仿真结果可发现前后左右四个悬架系统在悬架动挠度和轮胎动位移两个性能方面的输出是不相同的,对于前后输出不同首先是汽车的前后不对称;其次是前后悬架系统在减震器阻尼和弹簧刚度等方面不同引起的;最后是由于轮胎和地面的接触时间以及车身重量等方面所造成的。而对于左右悬架系统在左右弹簧刚度和减震器阻尼相同的情况下,主要是由于车身左右不对称和其它一些外在因素等引起左右输出不一致。

图3 前后左右四个悬架动挠度仿真曲线
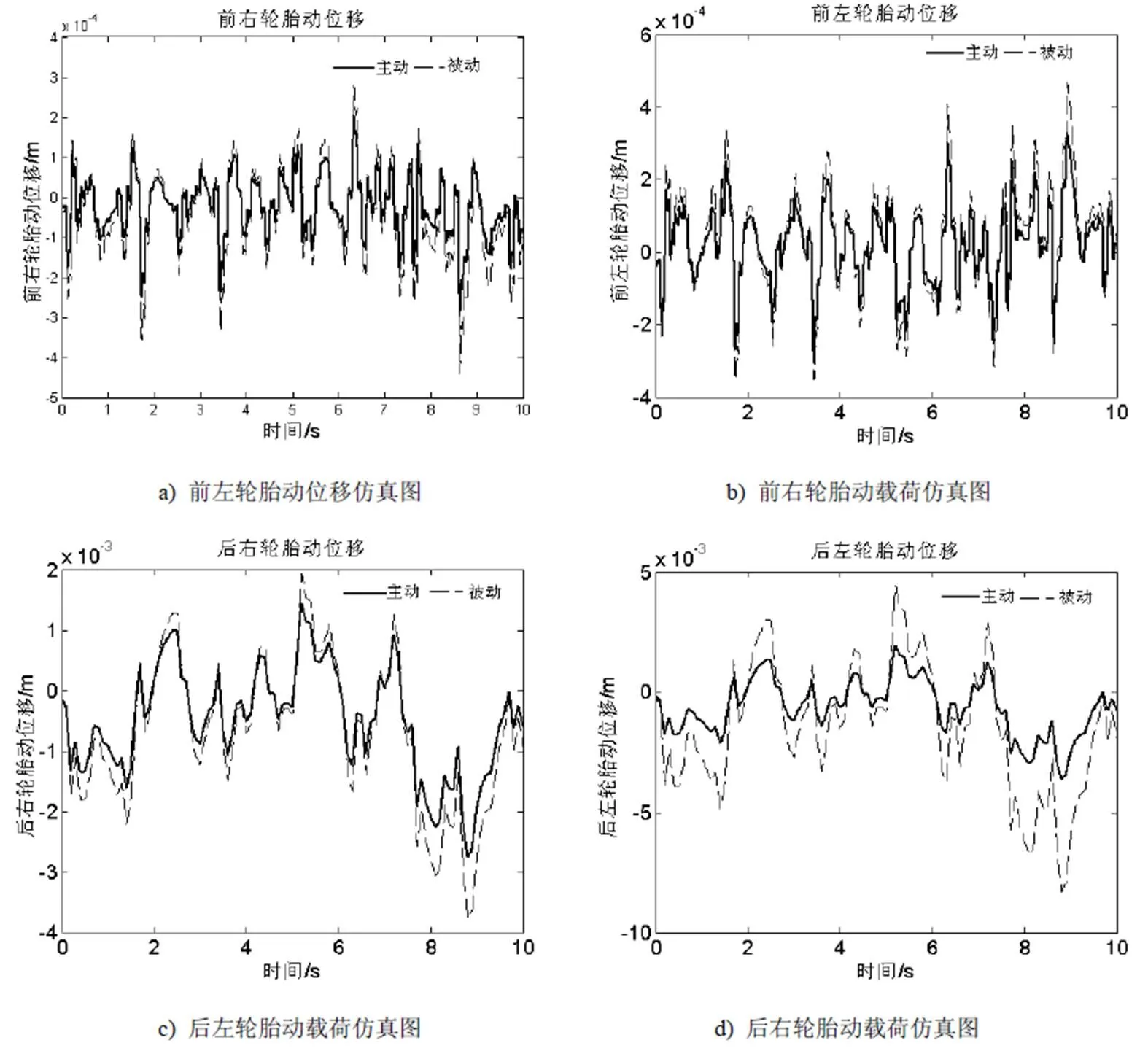
图4 前后左右四个轮胎动位移仿真曲线
4 小结
本文通过对某车型被动悬架和主动悬架系统相关性能指标参数的仿真对比分析,可知具有LQG控制器的主动悬架在整车仿真模型上应用后,汽车的相关性能有较好的改善;汽车的结构、悬架系统弹簧刚度和减震器阻尼系数的改变对汽车的相关性能也有一定的影响;加权系数的改变,将会获取不同的最优控制增益矩阵K,因而设计的主动控制器也不相同,而且针对不同车型参数设计的LQG控制器也不相同。本文仅仅只是借助于某一车型设计的控制器,并进行仿真对比分析,得出在被动悬架上安装主动控制器,其性能得到明显改善,从而提高了汽车行驶平顺性和安全性。该研究方法还可以缩短汽车设计制造的周期和成本。
[1] 马宝山.汽车悬架振动主动控制技术研究[D].哈尔滨:哈尔滨工程大学,2003.
[2] 庄继德.汽车电子控制系统工作[M].北京:北京理工大学出版社,1998.
[3] 喻凡.汽车系统动力学[M].北京:机械工业出版社,2005.
[4] 周云山.汽车电子控制技术[M].北京:机械工业出版社,2001.
[5] 万百五.控制论—概念、方法与应用[M].北京:清华大学出版社,2005.
[6] 兰波,喻凡. 车辆主动悬架LQG控制器的设计与仿真分析[J].农业机械学报,2004,35(1):13-17,47.
[7] 朱命怡,杨丽云,娄云.汽车主动悬架的整车控制方法及仿真研究[J].机械设计,2008,25(6):17-20.
[8] 唐传茵,张国忠.基于最优控制的主动悬架控制器设计[J].沈阳大学学报,2008.20(2):1-4.
[9] 刘海生.Simulik在汽车主动悬架LQG控制仿真中的应用[J].机械设计与制造,2008(8):106~107.
[10] 张海涛,高洪,查为民,等.具有LQG控制器的主动悬架半车模型动力学分析与仿真[J].安徽机电学院学报,2012 (1):42-45.
DYNAMICS SIMULATION AND ANALYSIS OF ENTIRE -VEHICLE MODEL’S ACTIVE SUSPENSION WITH LQG CONTROLLER
*ZHANG Hai-tao,WANG Zhi-ping,WANG Yun-xia,WANG Xiao-long
(Department of Automobile Engineering, Anhui Technical College of Mechanical and Electrical Engineering, Wuhu, Anhui 241000, China)
Entire -vehicle active suspension’s dynamic model through D’alembert’s principle was built and active suspension LQG controller was designed on the basis of optimal control theory. The simulation model was built through Matlab/Simulink and then the Band-Limited White Noise was adopted as the road input to carry out the dynamic performance simulation. The performances of active suspension and passive suspension were compared. The result indicated that active suspension’s performance was improved obviously, compared with performance of passive suspension.
active suspension;optimal control;LQG controller
U 461. 4
A
10.3969/j.issn.1674-8085.2014.04.015
1674-8085(2014)04-0067-07
2013-10-20;
2014-03-15
*张海涛(1985-),男,安徽寿县人,硕士生,主要从事汽车理论及其应用技术等研究(E-mail: zhanghaitao5238@163.com);
王治平(1957-),男,安徽潜山人,副教授,主要从事数字化设计等研究(E-mail: ahjdwzp@126.com);
王云霞(1981-),女,河北张家口人,讲师,主要从事汽车检测技术等研究(E-mail: zsdwyx@126.com);
王小龙(1988-),男,安徽宿州人,本科生,主要从事汽车理论与技术等研究(E-mail: wxl20120712@163.com).
