声学地层剖面野外数据采集几个关键问题的解决
2014-10-27丁维凤苏希华蒋维杰张济博苟诤慷傅晓明
丁维凤,苏希华,蒋维杰,张济博,苟诤慷,傅晓明
(1.国家海洋局 第二海洋研究所 工程海洋学重点实验室,浙江 杭州310012;2.上海地海仪器有限公司,上海201612)
1 引言
海洋地质研究、海底资源开发与海洋工程建设都需要对海底作详细的海洋地球物理调查,声学地层剖面探测是获取海底浅部地质信息的重要手段。目前我国许多单位已拥有声学地层剖面探测的硬件设备和配套的软件系统,但基本进口国外成熟的软硬件产品,如美国EdgeTech公司的系列浅剖硬件与配套的Discover采集软件[1]、美国Benthos公司的ChirpⅢ硬件[2]与配套的 Triton 公司SB-Logger[3]和 Chesapeake公司Sonar Wiz[4]采集软件等。国内也有相关单位在做声学地层剖面硬件产品的跟踪研究与开发,如中船重工杭州应用声学研究所与中国科学院声学研究所,其软件产品都只结合本单位的硬件设备作开发,未兼容国外成熟的商业硬件,应用推广受到限制。
国外配套的商业采集软件接口丰富,能接入多种国际通用的商业硬件,功能丰富,界面交互操作能力强。但也存在缺陷,有些缺陷会严重影响实际工作精度与效率,如GPS定位位置滞后、反射同相轴极性反转与深水探测等缺陷,这些缺陷多次向软件开发商反映都未解决。为避免过度依赖国外技术,我们决定从底层自主开发自己的采集和后处理解释系统,重点解决国外商业软件中存在的缺陷问题。
2 国外商业软件的缺陷
针对美国Benthos公司生产的ChirpⅢ声学地层剖面硬件产品,国外硬件商配备的采集系统主要有Triton公司的SB-Logger和Chesapeake公司的Sonar Wiz两款软件,美国OIC公司的Geo DAS软件也可接入ChirpⅢ硬件产品,但国内的用户较少。SBLogger与Sonar Wiz软件有共同的缺陷,也存在各自的其他问题,这些问题严重影响了我们实际工作。下面分别列举国外商业软件的缺陷。
2.1 强能量反射同相轴发白
海底不同底质的地层对声波的阻抗不同,两层介质间的声波阻抗差大,声反射就强,接收的反射振幅能量也大,反映到显示剖面上表现为厚重的灰度。SB-Logger与Sonar Wiz两款软件在现场采集时反射剖面显示正常,但回放记录文件遇到强能量反射同相轴时都发白,发白同相轴改变了原反射波的相位与极性,严重影响反射信号的判读,影响反射同相轴的自动追踪,给后续的处理解释带来障碍。如图1所示的SB-Logger软件采集数据回放与图2 Sonar Wiz软件采集数据回放,两图中海底面反射同相轴都发白,图2中海底面以下反射层位也出现同样问题。
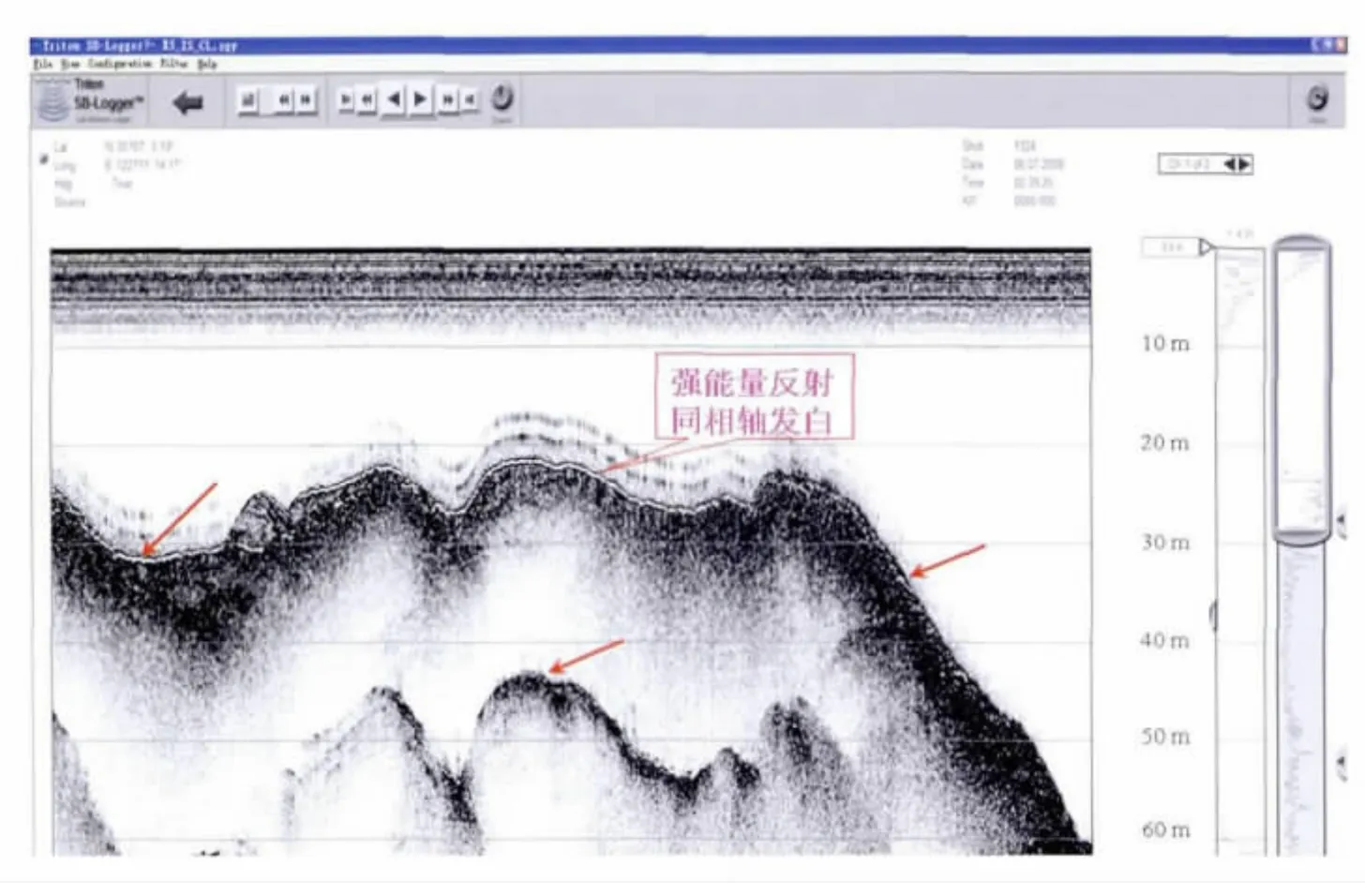
图1 SB-Logger软件采集数据回放
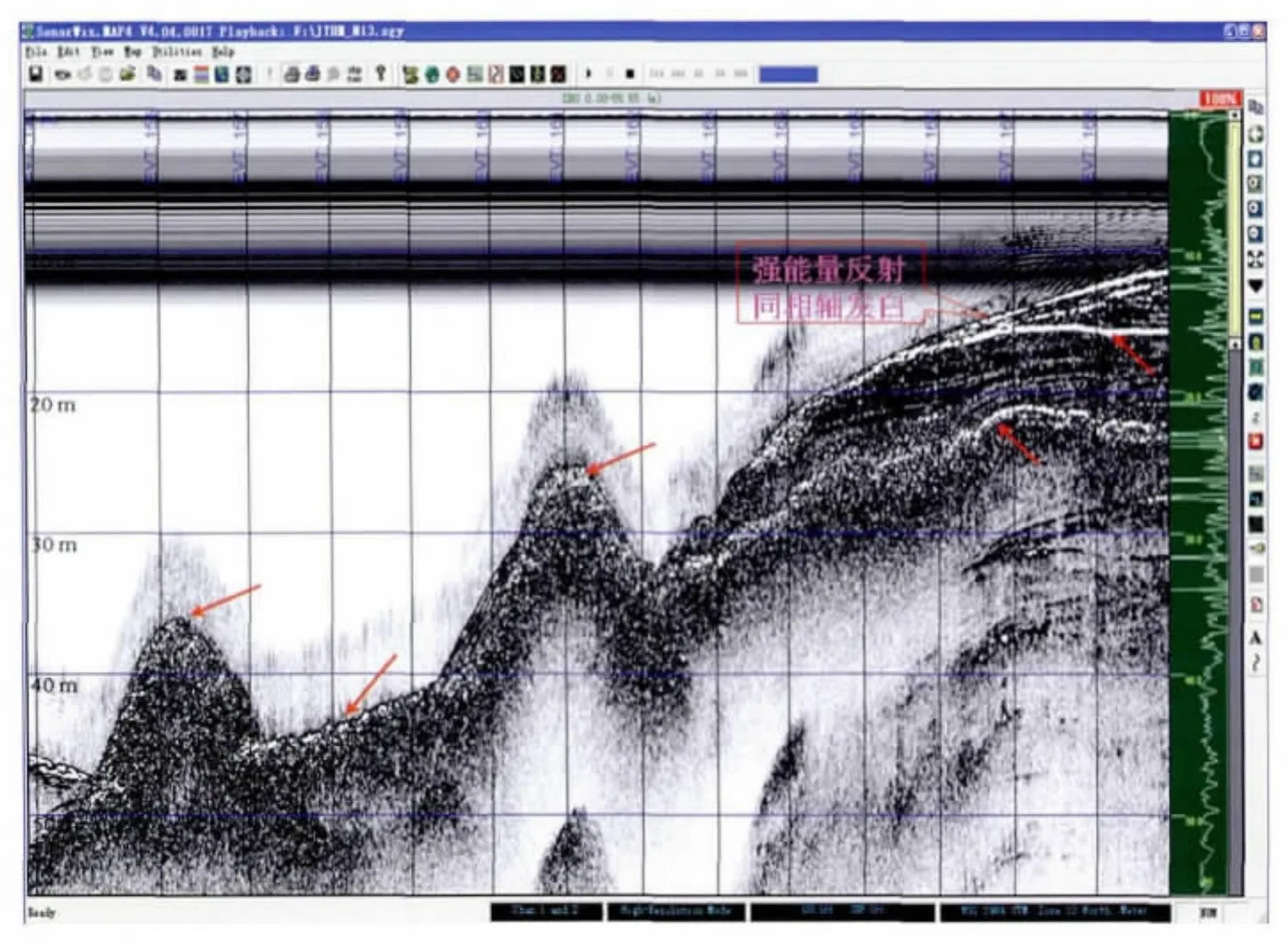
图2 Sonar Wiz软件采集数据回放
2.2 GPS导航定位滞后
Triton公司SB-Logger采集软件现场数据采集时,剖面上显示的导航定位数据与导航计算机上显示一致,但采集数据存储后再回放时,剖面上显示的导航定位位置与现场采集位置差别很大。如图3所示,经我们多次比较研究,发现现场采集时导航位置与记录文件回放时位置相差50~60 m,时间相差20余秒。这个误差会严重影响探测数据的精度,给解释成果带来较大的位置偏差。

图3 GPS导航定位误差
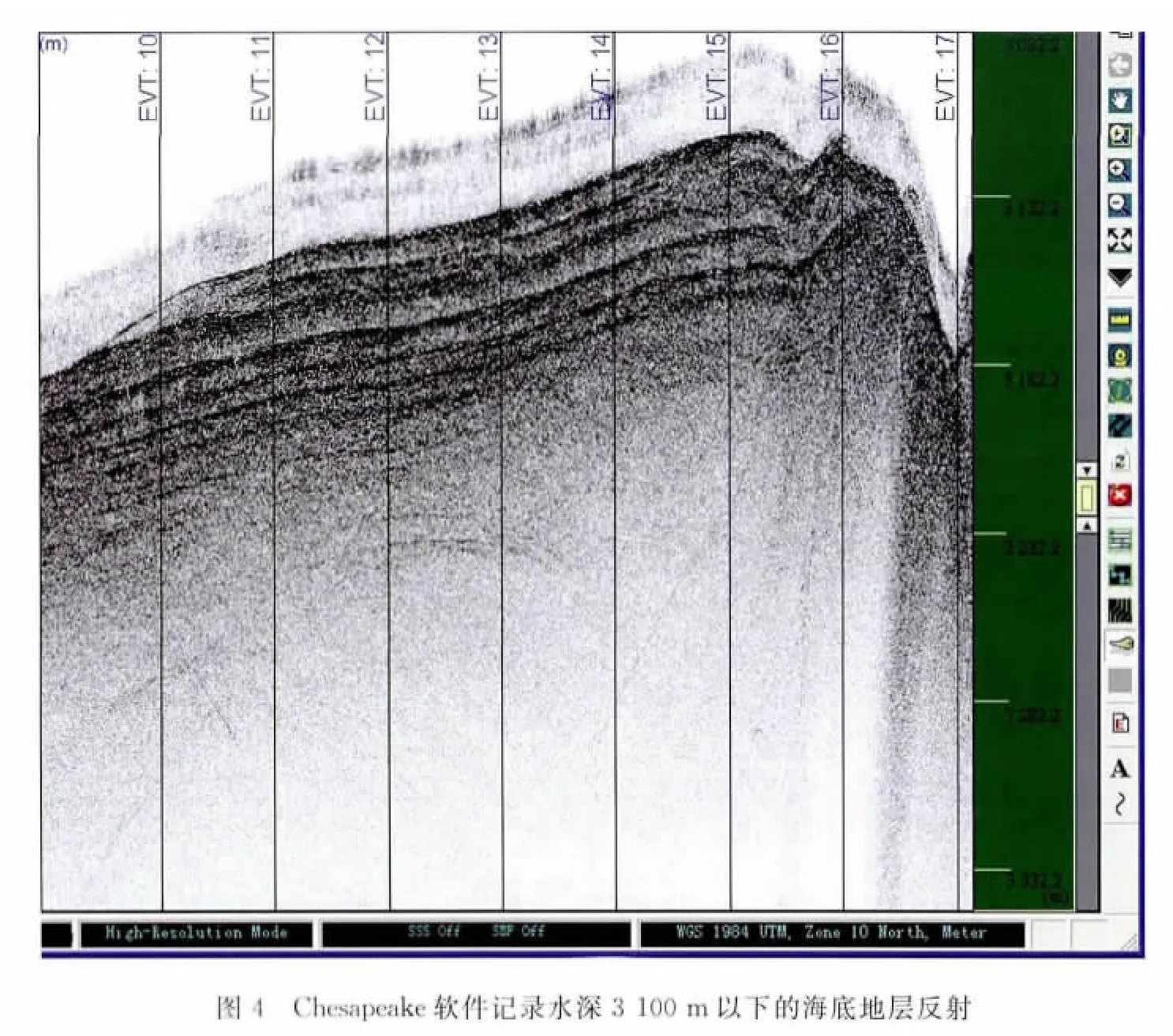
2.3 深水数据采集与存储问题
SB-Logger软件连接ChirpⅢ硬件时,最大探测深度不超过600 m,即记录波长最大只有800 ms,该软件无法记录水深600 m以下有效数据。Chesapeake软件虽然保持了ChirpⅢ硬件记录6 000 m深水数据的功能,但该软件作了数据重采样,舍弃了许多有效采样数据,剖面变模糊,影响地层分辨率。如图4所示,Chesapeake软件记录了3 100 m水深下的有效地层反射,但做了重采样,数据量减少,剖面反射同相轴变模糊,分辨率降低,影响海底面以下精细地层的探测。
3 问题分析与自主开发解决
针对国外商业软件存在的缺陷,通过我们从底层自主研发,详细分析了这些问题产生的原因,并找到了解决这些缺陷问题的方法。下面详细分析上述问题,并列出我们的解决方案。
3.1 同相轴发白问题的分析与解决
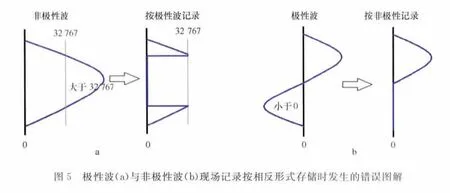
声学地层剖面控制主机的DSP 模块一般以2字节空间接收存储单个振幅样点,ChirpⅢ主机现场采集时能发射极性与非极性两种波形,2字节极性波其振幅大小范围在-215~215-1(-32 768~32 767),2字节非极性波振幅大小为0~216-1(0~65 535)。国外商业采集软件不能自动识别极性波反射信号和非极性波反射信号,只能通过人工设定告知采集系统。若现场采集按默认的极性波模式采集存储非极性反射回波,超过32 767大小的振幅值Windows系统会默认存为小于或等于0的值,反之,若以非极性模式记录极性反射波,小于0的振幅值系统会以0存储,如图5所示。这会破坏反射记录的波形,一个完整的强反射波形会被分割成中间为0,两头突跳的碎波,完整的正负波形被破坏成只有单边正波形的记录,室内回放时就会在灰度图上出现图1和图2所示的反射同相轴发白现象。
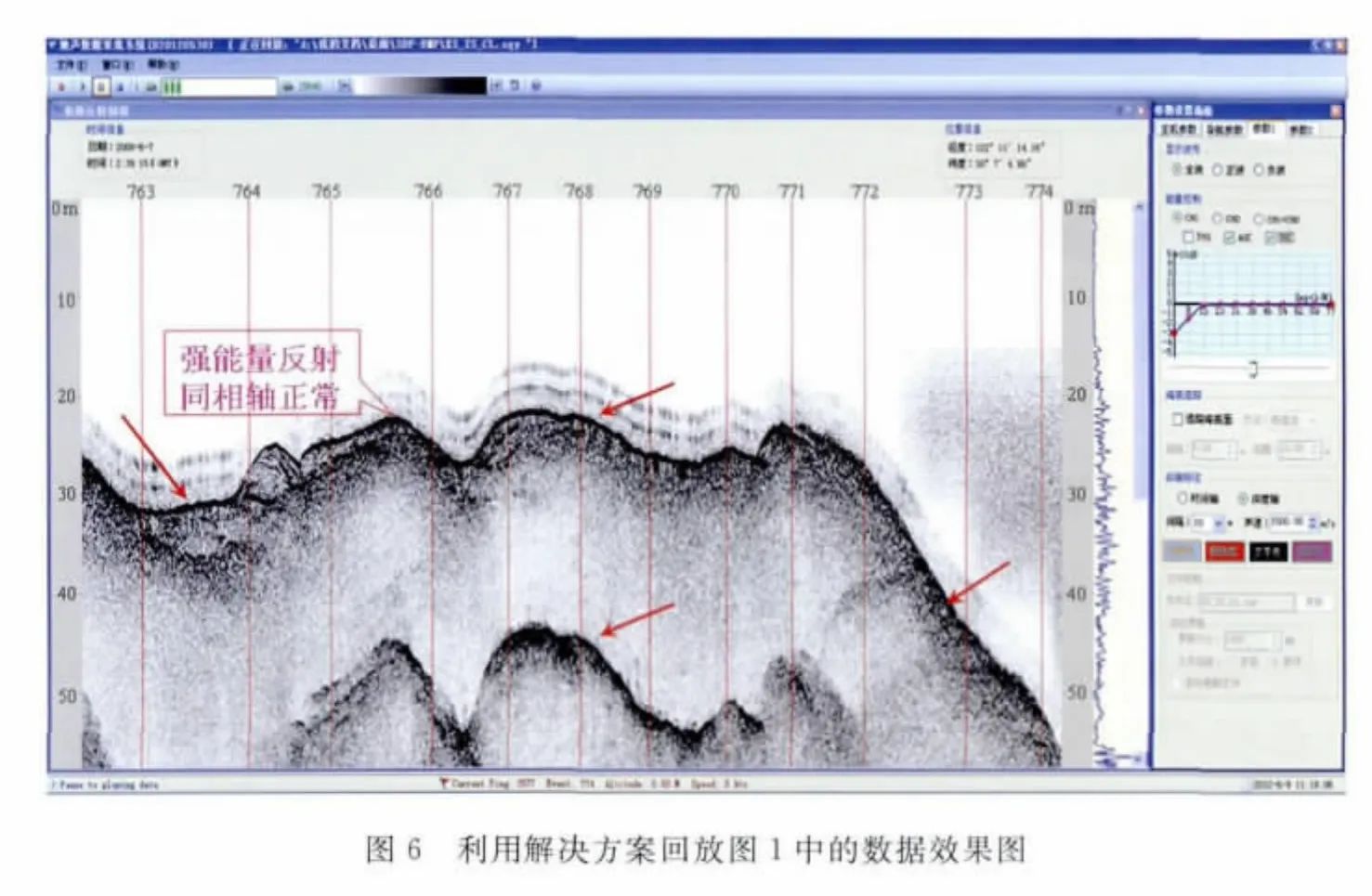
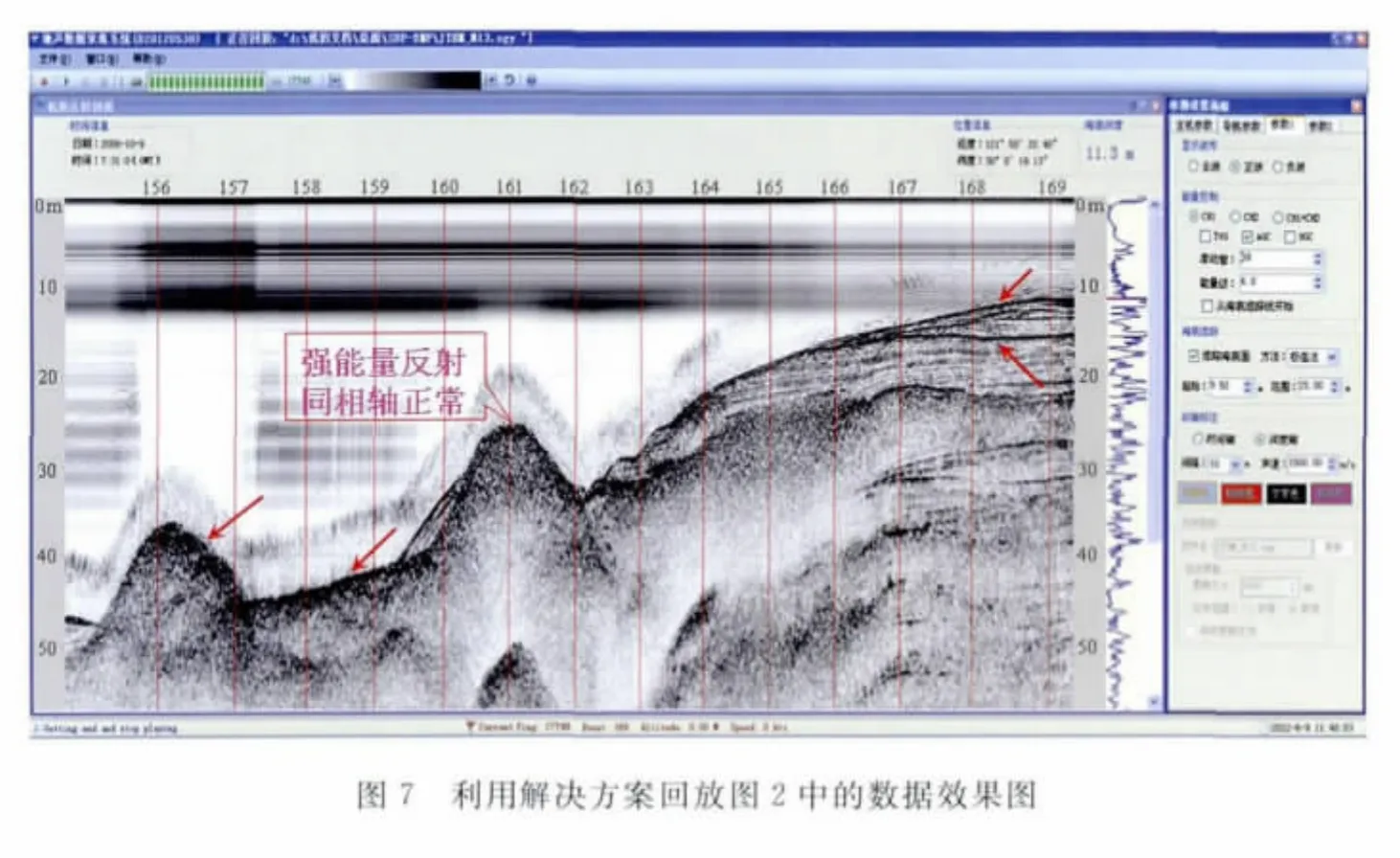
解决上面问题无需按国外商业软件所述由人工自定义极性特性,软件完全可以自动识别判断。关键是在读取2字节振幅值时不能根据SEG-Y标准去定义短整形变量来存储样点值,而改用字节数组来存储,再通过位转换将字节数组分别转换为2字节的符号整型与无符号整型两变量,最后简单判断两个整型变量值的差别就能识别出反射波的极性。野外数据采集时若将存储格式定义为4字节符号变量存储,上诉问题也不存在,但要成倍的消耗硬盘资源。图6和图7为利用解决方案分别调用图1、图2两数据显示结果,图6和图7两剖面图都能有效显示反射信号,反射同相轴连续,相位无突变。
3.2 导航定位问题分析与解决
SB-Logger采集软件出现如此严重的导航定位滞后问题,经仔细研究发现问题出现在Windows多线程排斥上。采集系统现场采集时需要在极短时间(毫秒级)内完成多个任务,如实时响应用户交互控制指令、及时向硬件主机发送用户指令、及时接收主机传送的大量反射数据、实时绘制反射数据剖面图、实时接收来自COM串口的导航与定位及其涌浪补偿器数据等,所有这些工作都需要采集系统在极短时间内做出实时响应并完成相应的工作,这给采集计算机带来了很大的负担,特别是绘制大量的反射信号剖面图,灰度(伪彩色)运算与屏幕输出需要消耗计算机大量的硬件资源并占用运算时间,采集系统若不设计合理的进程就会导致系统崩溃或者信号堵塞,SB-Logger采集系统出现导航定位信息滞后就是因信号线程堵塞缘故引起。
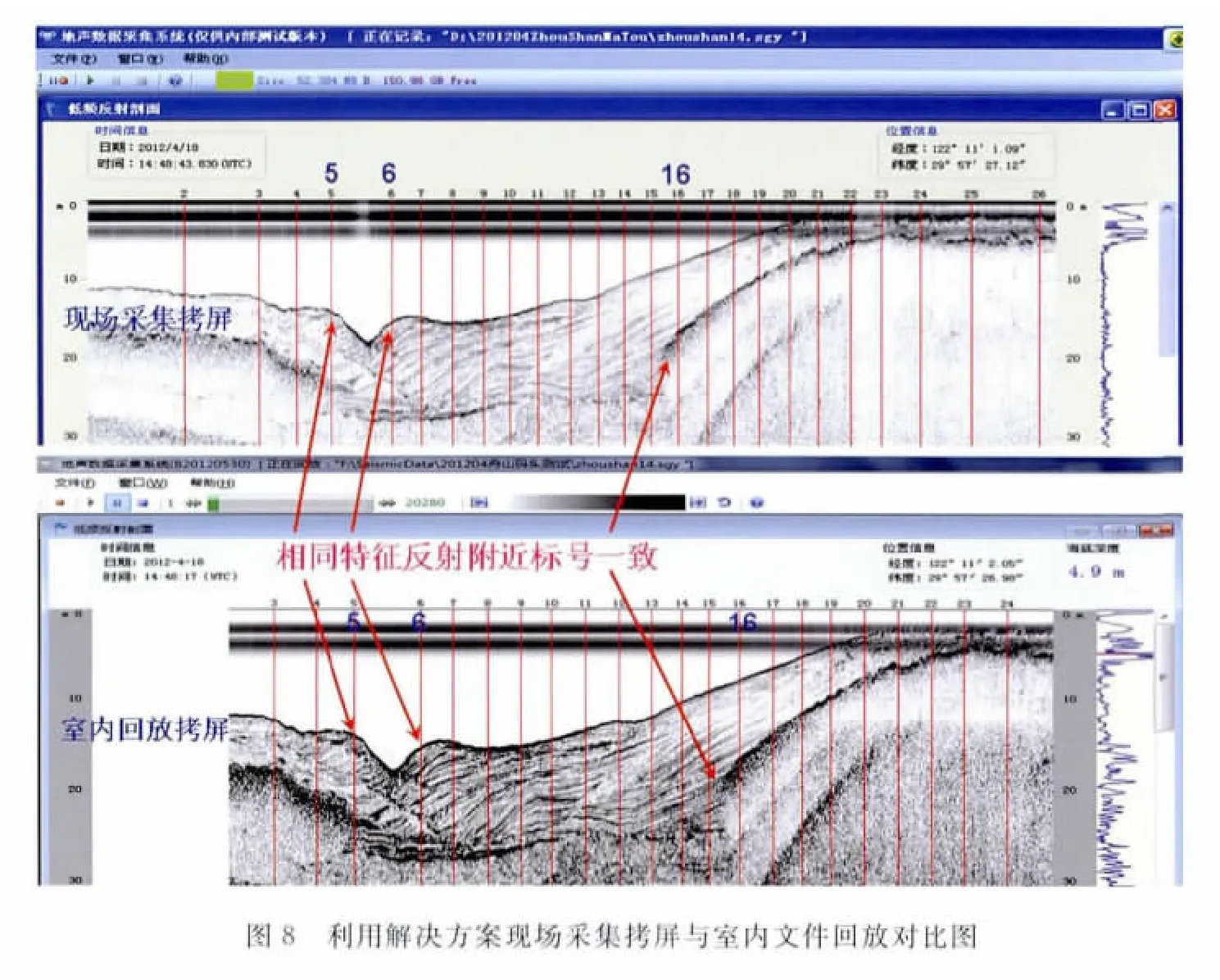
实时采集系统需要采用Windows系统中的多线程编程来完成,其中各路数据的接收与实时存储为最重要工作,现场剖面绘图与显示可作为次要工作来安排。SB-Logger软件将现场实时绘图与显示作为首要工作并安排主线程来完成,而绘图是非常繁重任务,需要耗费计算机90%以上的硬件资源,且完成计算机屏幕大小的灰度图绘制还要耗费较长的时间(视计算机硬件配置而定),若将剖面绘制与显示作为主线程,导航定位数据存储等次要线程就会受堵塞,导致定位数据存储滞后。剖面绘制与显示一般只作现场监控使用,剖面显示滞后并不影响实际工作,因此将数据实时采集与存储作为主线程,而将绘图作为次线程来安排,采集时各路数据的存储就不会发生堵塞滞后。图8为采用上述解决方案研发的系统在现场采集与室内回放同一数据时对比图,两图中显示的导航定位位置一致,未发生信息滞后现象。
3.3 深水数据采集问题解决
为响应我国向深海发展的需要,深水探测必不可少。目前针对ChirpⅢ硬件开发了深水功能的只有Sonar Wiz软件,但该软件为了能用标准SEG-Y格式存储深水反射数据,采取了重采样减少数据量的方法,这样处理会降低剖面的纵向分辨率。为了保持原始数据量,我们需要采用其他格式存储反射数据。
标准SEG-Y格式受2字节符号短整型变量的限制,单个记录道最多只能存储32 767(215-1)个样点,当水深达到1 000 m时,记录波长需要1 500 ms,按32μs间隔采样,单个Ping数据采样点就超过47 000个,已超出SEG-Y格式的存储范围,水深6 000 m时,记录波长需要8 s,采样点数达到250 000个,远远超出SEG-Y格式要求。若要存储超过600 m的深水反射数据,我们可以采用XTF格式[5],XTF格式单个Ping最多可以存储231-1个样点,足够容纳探测万米水深数据量。图9为研发系统采用XTF格式存储超过3 300 m水深原始数据的回放,因数据未进行重采样,微细反射层显示清晰,纵向分辨率得到保持。

深水探测光有纵向分辨率还不够,还需要考虑横向分辨率的问题。在深水区,若发射记录波长为8 s,采用一次发射单个Ping的方法采集记录数据,调查船若以2 m/s的速度航行,探测剖面水平分辨率为16 m,实际工作会达到20 m以上,如此大的水平间距远远达不到高分辨率探测的要求。为解决水平分辨率的问题,国外仪器商提出了Multi Ping探测技术,原理为声学换能器一次向海底下连续发射多个Ping(如10个甚至更多),而采集软件可以按固定的时间间隔(如1 s)连续接收前面Ping反射回的有效数据[6—7],这样可以弥补单个Ping长时间记录在水平分辨率上的缺陷。
4 总结
声学地层剖面探测是海洋地质与地球物理学研究的重要手段,探测精度与效率非常重要。国外商业软件经我们多年的使用,发现存在几个关键的缺陷,如强能量反射同相轴在灰度图上显示发白,GPS导航定位信息存在严重的位置滞后,深水探测国外软件不完善或未开发相应功能等,这些缺陷已严重影响了我们的实际工作。
为查清国外商业软件存在上诉问题的根源,我们通过多年的研究与开发,找到了缺陷问题的原因所在。反射同相轴发白因字节存储引起,GPS位置滞后因Windows线程排斥引起,深水探测受SEG-Y格式限制。针对这些问题,文中提出了对应的解决方法,所提解决方法经实际数据测试正确可靠,在实际工作中已获得了广泛的应用。
[1]EdgeTech Corporation.Discover SUB-BOTTOM Technical &user’s manual,Revision:2.2[OL].USA,2005.http://www.edgetech.com/edgetech/gallery/category/sub-bottom-profiling-systems(2013-11-25)
[2]Benthos Corporation.CAP-6600 ChirpⅡAcoustic Profiling System Manual[OL].USA,1996.http://www.benthos.com/_doc/main/Brochures_Datasheets/elp362D__001815__rev_L.pdf(2013-11-25)
[3]Triton Corporation.Triton SB-Logger user’s manual[OL].USA,2008.http://www.tritonimaginginc.com/site/content/soft ware/brochures/TII_08_SBLogger.pdf(2013-11-25)
[4]ChesaPeake Technology Inc.Sonar Wiz.MAP User’s Guide[OL].USA,2007.http://chesapeaketech.com/docs/CTI-SBP-Datasheet.pdf(2013-11-25)
[5]丁维凤,冯霞,傅晓明,等.多波束XTF格式数据航向信息重写入实例[J].海洋通报,2011,30(1):1-6.
[6]Edge Tech Corporation.Supporting Multiple Pings in the water with Edge Tech Sonars Mannual[OL].USA,2005.Http://www.edgetech.com/edgetech/gallery/category/sub-bottom-profiling-systems(2013-11-25)
[7]Edge Tech Corporation.3300:Hull Mount Sub-Bottom Profiler[OL].USA,2005.Http://www.edgetech.com/edgetech/gallery/category/subbottom-profiling-systems(2013-11-25)