并联型有源电力滤波器输出滤波器的阻尼控制
2014-10-20胡中功邓晓虹罗自永
胡中功,吴 彬,邓晓虹,罗自永
1.武汉工程大学电气信息学院,湖北 武汉 430205;2.深圳市库马克新技术股份有限公司,广东 深圳 518108
0 引 言
有源滤波器在开关频率处会产生较大的谐波电流.为了尽量衰减开关谐波,通常使用电抗器作为有源滤波器的输出滤波器,经过长期实际应用,其参数设计方法已经成熟.在使用电抗器时,为了减少开关次谐波同时不降低系统的动态性能,需要增大电抗器的电感值.由于电感具有滞后电流的作用,增大电感必然会带来系统动态性能的降低,同时成本也会增加,补偿电流对谐波电流的跟踪精度也会下降[1].电感-电容-电感(LCL)滤波器与电感(L)型滤波器相比,在衰减高频段谐波时,系统的动态性能有不少提升,同时,减少了电感量,也缩小了产品的占地面积,缩减了产品的硬件投资.尤其在大功率场合,滤波的优势更为明显.因此成为近几年研究的热点之一.
加入LCL滤波器后,系统由一阶变成三阶,容易引起谐振.脉冲宽度调制(Pulse Width Modulation,以下简称:PWM)整流器如同一个谐波源[2],开关频率附近的高次谐波会对LCL滤波器产生激励,引起谐振,导致系统不稳定,输入电流谐波畸变率增大[3].在滤波电容支路中加入电阻,与电容串联可以避免谐振,这种方式在实际中的运用较为成熟,缺点是阻尼电阻的加入增加了额外的损耗,特别是在大功率系统中,系统效率会大受影响.
为了解决上述的问题,在有源阻尼思想的反馈控制策略的基础上,引入了并网侧以电感电流检测作为外环、以电容电流反馈作为内环的双闭环控制方法.同时,笔者对电阻阻尼策略也进行了研究,并用MATLAB仿真软件对比了采用电容电流反馈的有源阻尼控制策略和阻尼电阻控制策略的补偿效果,仿真结果表明LCL有源阻尼方法是可行的,且具有较好的效果.
1 有源电力滤波器输出LCL的数学模型
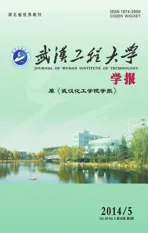
带LCL的有源滤波器系统结构如图1所示.图1中,Ua、Ub、Uc是电网电压,L1、L2和Cf组成三阶LCL滤波系统,非线性负载是系统谐波电流的来源.为了简化起见,图1中均未考虑寄生参数的影响.由于并联型有源电力滤波器(Active Power Filter,以下简称:APF)主要用于补偿2次至25次低次谐波电流含量,且补偿电流含有开关频率及其整数倍次的谐波分量[4],故要求LCL滤波器对中低频具有较宽的通频带,而对高频具有很强的抑制作用[5].
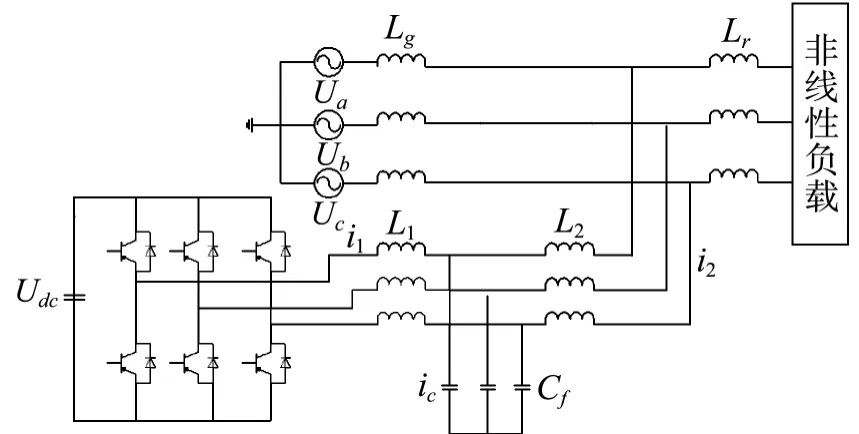
图1 并联型有源滤波器系统结构Fig.1 System architecture of shunt active filter
假定电网三相是对称的,则每相滤波器的特性是一致的,其在高次谐波下的单项等效模型如图2所示.
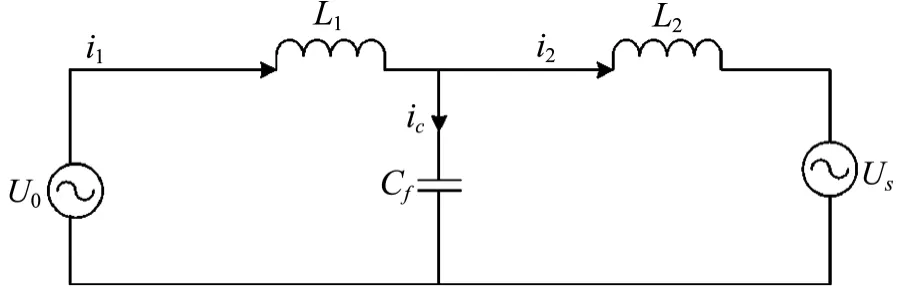
图2 LCL滤波器原理图Fig.2 Schematic of LCL filter
变流器输出U0经过LCL滤波器转换为并网补偿电流i2,其传递函数H(s)为:

令式(1)分母为0得到其谐振频率:
LCL滤波电感的选取要能精确地满足对谐波电流进行跟踪补偿的基本条件,考虑换相过程:
式(3)中:Lgx是x相电网的电感,Lrx是x相负载进线电感.
补偿电流的变化率为:

要实现精确补偿,电感值必须满足[6]:

由式(3)、式(4)、式(5)可得:

在没有阻尼电阻时,对传递函数H(s)作幅频波特图,如图3所示.
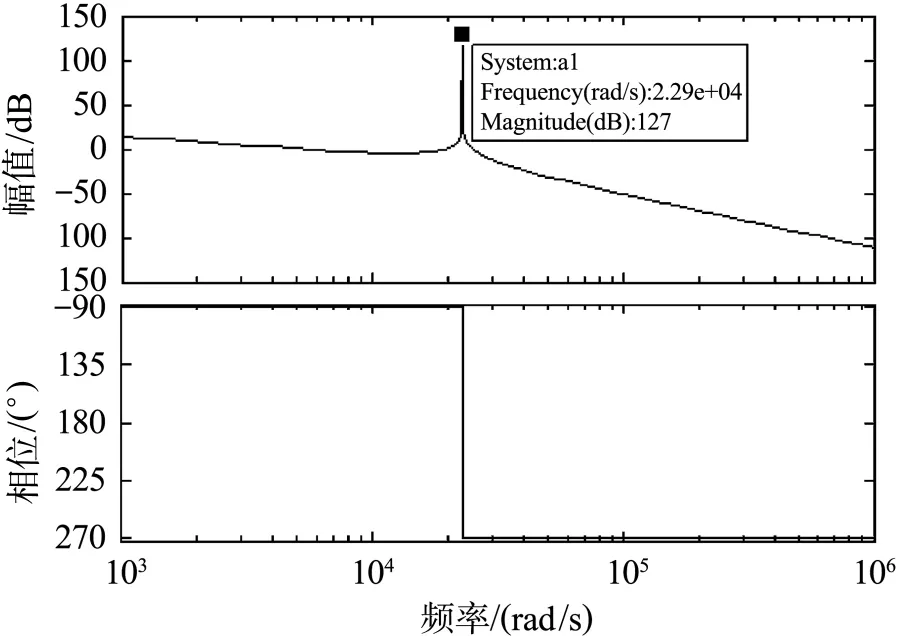
图3 LCL滤波器波特图Fig.3 LCL filter Bode plot
从图3可以看出:LCL滤波器在105~106rad/s频率段衰减率为线性,每10倍频程衰减60dB.但在频率为22 900rad/s(3 646Hz)附近有幅值很大的尖峰,谐波电流在峰值处会被放大,增大了谐波的畸变率,严重影响了系统的稳定运行.
2 无源阻尼模型及阻尼电阻的设计
2.1 无源阻尼的数学模型
当系统中加入阻尼电阻时,LCL滤波器拓扑结构如图4所示.其传递函数为:
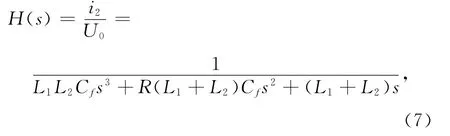
与式(1)相比,式(7)多了一个s2项,使得极点落在复平面的虚轴左半平面,系统稳定,不会引起震荡.
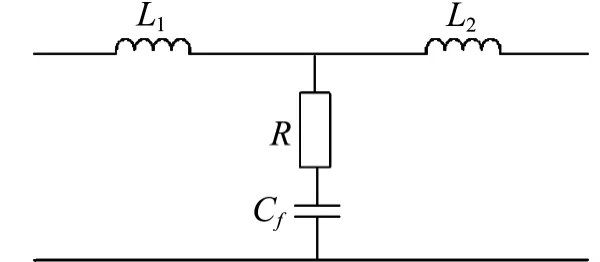
图4 无源阻尼等效图Fig.4 Equivalent diagram of passive damping
2.2 阻尼电阻的设计
取R值为0Ω、1Ω、3Ω、10Ω,作LCL滤波器的开环传递函数的波特图,如图5所示.
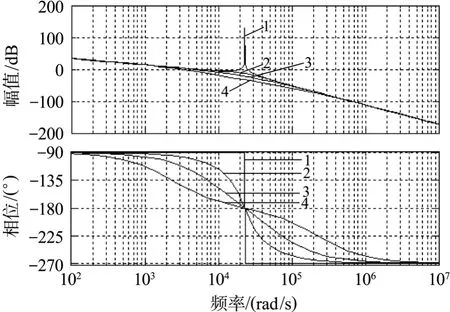
图5 R 为0,1,3,10Ω时LCL滤波器开环传递函数波特图Fig.5 LCL filter open loop transfer function Bode plot when R=0,1,3,10Ω
理论上,只要加入阻尼电阻,就能抑制尖峰.阻尼电阻起到了衰减滤波器的谐振峰值的作用,由图5可知:如果R选择过小,抑制系统谐振的能力不足;增大电阻R,虽然可以一定程度上减小系统的损耗,但是却带来了对高频段谐波衰减能力降低的弊端.一般R取值为谐振频率处电容阻抗的三分之一,即R=,ω =3 646Hz,计算出rR值为2.18Ω,此时其传递函数波特图如图6所示.由图6可知,系统谐振得到了抑制,高频段谐波衰减能力也较强.
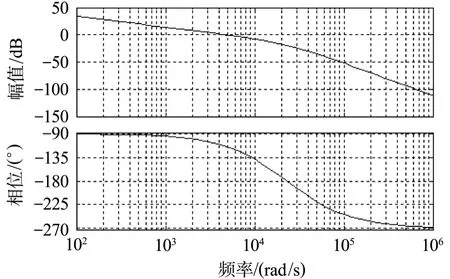
图6 R=2.18Ω时波特图Fig.6 Bode plots when R=2.18Ω
3 有源阻尼控制策略设计
该有源阻尼方案采用双闭环控制策略.并网侧以电感电流控制器作为外环、以采样电容电流进行反馈控制作为内环,将有源滤波器实际输出电流与检测到的补偿谐波含量指令信号相比形成误差量,经比例-积分(Proportional Integral,以下简称:PI)控制器作为电容电流内环指令信号.其控制框图如图7所示.
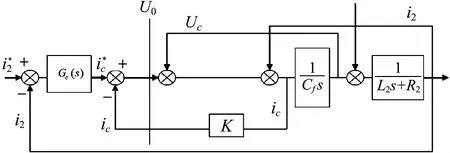
图7 双环控制原理图Fig.7 Schematics of loop control
设K为电容电流的反馈系数,其传递函数为:

由式(8)可知:该控制方法的实质是引入内环反馈代替阻尼电阻.以K为参数绘制关于K的广义根轨迹,如图8所示.
由图8可知:要使系统稳定,K的取值范围为0.446~5.81.K的选取与阻尼系比密切相关:

式(9)中:ζ为阻尼比,阻尼比越大,阻尼效果越强,但过大的阻尼比会使得系统的稳定裕度降低.经过反复仿真比较取阻尼比ξ=0.707,由此求出反馈系数K=3.07,代入式(7),可作反馈系数K=3.07时的波特图,如图9所示,抑制谐振的效果良好.
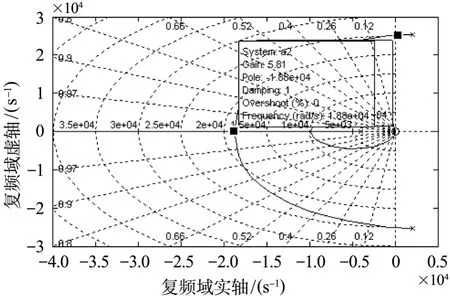
图8 K的广义根轨迹Fig.8 Generalized root locus of K
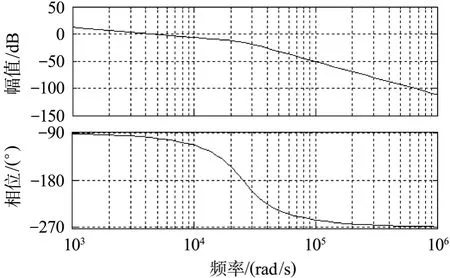
图9 有源阻尼控制的波特曲线Figure.9 Potter curve active damping control
4 实验仿真对比
为进一步验证无源阻尼与有源阻尼理论的正确性,同时也为了对比两者之间的优劣,笔者以表1的数据为准用 MATLAB/Simulink搭建系统模型.
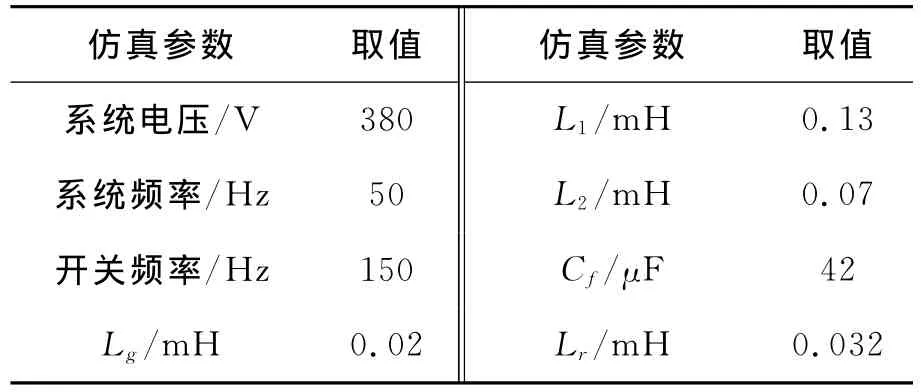
表1 LCL滤波选取的参数Table 1 Parameters of LCL filter
图10(a)、图10(b)分别是用无源阻尼策略和有源阻尼双环控制方法后得到的补偿后的电网电流波形和电网电压波形,两者的波形都得到明显改善.
图11是对两者电流的快速傅里叶变换(Fast Fourier Transform,以下简称:FFT)分析,无源阻尼策略得到电流的总谐波失真(Total Harmonic Distortion,以下简称:THD)含量是4.21%,有源阻尼控制策略电流的THD是3.72%.由图11可以看出,两者的5、7、11、13次谐波含量基本相同,但是采用有源阻尼控制策略的其他谐波含量要低于采用无源阻尼方案时的含量.
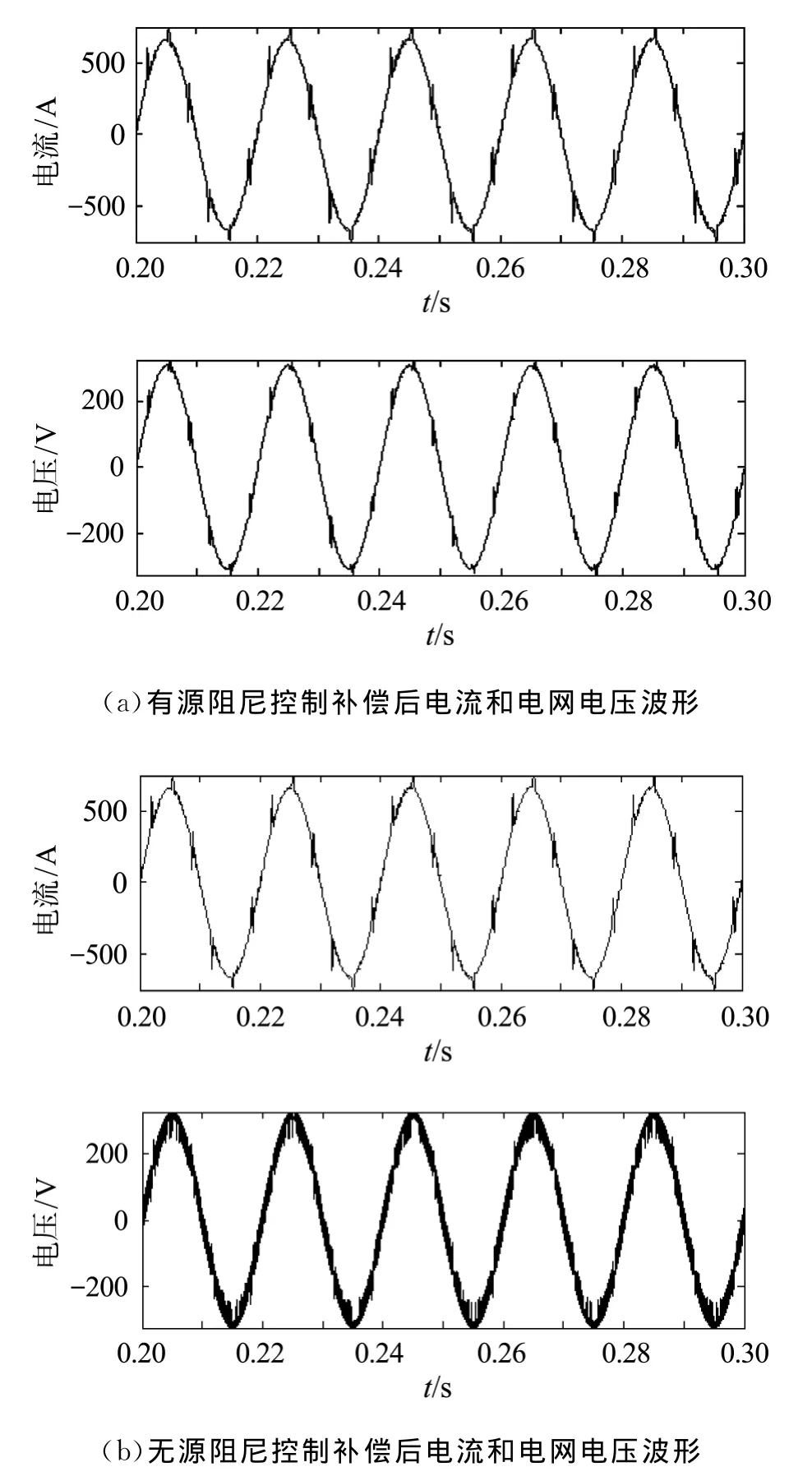
图10 采用阻尼策略后电流和电压波形Fig.10 Current and voltage waveforms after using damping strategy
图12给出了滤波器从开始运行到达到稳定状态的动态过程,结果显示滤波器在启动时波形会有震荡,但能回复到正常状态.
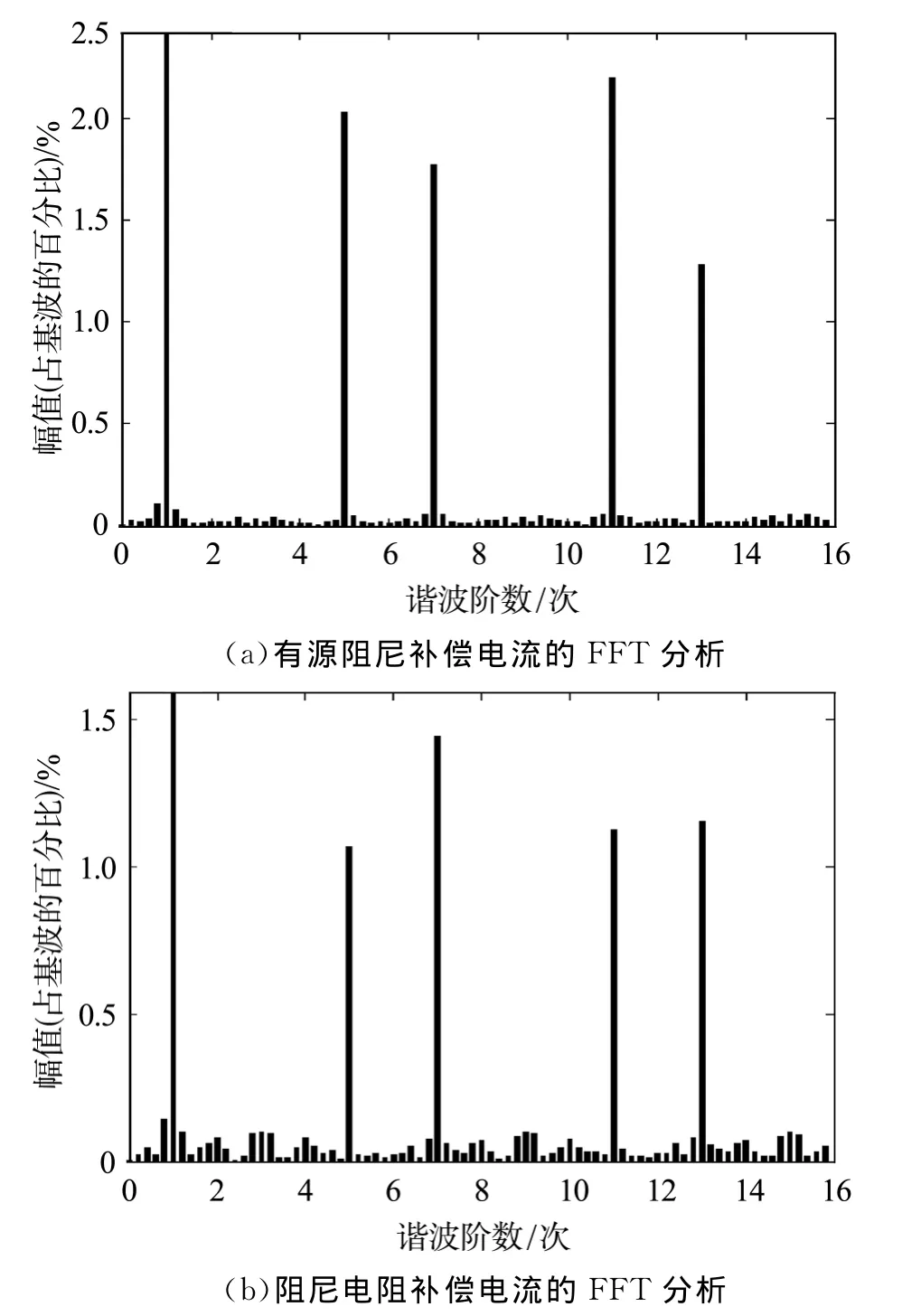
图11 阻尼补偿后电流的FFT分析Fig.11 FFT analysis after damping compensation
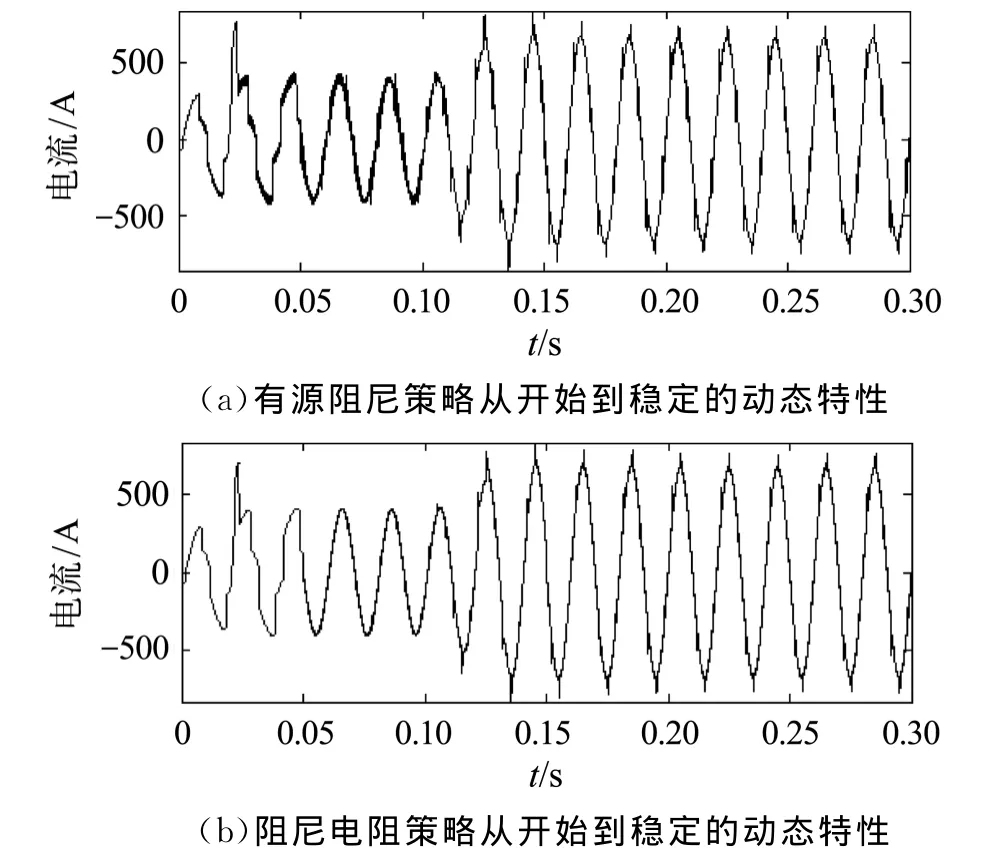
图12 阻尼补偿后系统的动态特性Fig.12 Dynamic characteristics after using damping strategy
5 结 语
笔者对有源滤波器输出LCL滤波容易引起谐振的原理进行了分析,并分别采用加入阻尼电阻和引入电容电流反馈的闭环控制策略的方法进行了研究:
a.阻尼策略可以很好的对系统的谐波进行补偿,开关频率处纹波衰减率较为理想,系统的稳态和动态性能均满足求.
b.在不考虑损耗的情况下,阻尼电阻方法和有源阻尼控制方法得到的效果差距并不大,甚至在某些情况下阻尼电阻方法由于结构简单,受控制的非理想因素影响较小,这与目前工业上仍是大量采用无源阻尼的情况相符.
c.考虑到无源阻尼的损耗问题,在大功率场合,有源阻尼的实际应用范围更广.
[1]郭希铮,游小杰,李欣然.LCL滤波的三相电压型PWM整流器无传感器有源阻尼控制方法[J].电工技术学报,2011,26(增刊1):91-96.GUO Xi-zheng,YOU Xiao-jie,LI Xin-ran.A sensorless active damping control method for three-phase voltage PWM rectifier with LCL filter[J].Transactions of China Electrotechnical Society,2011,26(S1):91-96.(in Chinese)
[2]LANG Yong-qiang,XU Dian-guo,HADIANAMREI S R,et al.A novel design method of LCL type utility interface for three-phase voltage source rectifier[C]//36th IEEE Power Electronics Specialists Con-ference,June 16-16,2005,Recife,Brazil.IEEE Publishers,2005:313-317.
[3]张宪平,李亚西,林资旭,等.LCL滤波的电压型PWM整流器的有源阻尼控制[J].电气传动,2007,37(11):22-25,60.ZHANG Xian-ping,LI Ya-xi,LIN Zi-xu,et al.Active damping control of voltage source PWM rectififer with LCL filter[J].Electric Drive,2007,37(11):22-25,60.(in Chinese)
[4]武健,何娜,徐殿国.重复控制在并联有源滤波器中的应用[J].中国电机工程学报,2008,28(18):66-72.WU Jian,HE Na,XU Dian-guo.Application of repetitive control technique in shunt active power filter[J].Proceedings of the CSEE,2008,28(18):66-72.(in Chinese)
[5]王盼,刘飞,查晓明.并联型有源电力滤波器输出LCL滤波器的有源阻尼控制[J].研究与分析,2011,25(3):41-45.WANG Pan,LIU Fei,CHA Xiao-ming.Active damping control of LCL filter based on shunt active power filter[J].Shaanxi Electric Power,2011,25(3):41-45.(in Chinese)
[6]彭光强,刘振,彭欢,等.LCL滤波器在并联型有源电力滤波器中的设计[J].通信电源技术,2011,28(5):1-4.PENG Guang-qiang,LIU Zhen,PENG Huan,et al.Design and research on shunt active power filter with LCL filter[J].Telecom Power Technologies,2011,28(5):1-4.(in Chinese)