船舶引航辅助系统的研究与实现
2014-10-17彭国均魏武财
贾 炜,彭国均,魏武财,仝 洁
● (1.唐山港引航站,河北唐山 063611;2.集美大学船舶助航研究所,福建厦门 361021)
船舶引航辅助系统的研究与实现
贾 炜1,彭国均2,魏武财2,仝 洁2
● (1.唐山港引航站,河北唐山 063611;2.集美大学船舶助航研究所,福建厦门 361021)
近年来,进出港口的船舶数量越来越多、尺度越来越大,加上不良天气的影响,使得引航工作量越来越大。为了实现在能见度不良的环境下安全引航,通过分析引航业务实际需求,研究并实现了船舶引航辅助系统。该系统综合应用了AIS技术、差分GPS技术、WIFI技术等先进技术,为引航员提供更加详细、准确、实时的靠泊动态数据,辅助引航员更好地控制引航作业过程,提高工作效率和作业安全性。
船舶引航;辅助靠泊;AIS技术;差分GPS技术
0 引言
随着经济的快速发展,现代船舶正朝着高速化、大型化、专业化的方向发展,港口作为主要的贸易运输途径,其货物吞吐量不断增加、生产任务日趋繁重,港口的地位和作用也越来越重要。船舶引航是船舶与港口生产的一个重要环节,保证引航的安全就是保证了港口、船舶航行以及维护航行秩序安全。所谓船舶引航就是经港口国主管部门认可的引航机构及其分支机构派出的引航员登轮引领船舶在特定的区域范围内航行、靠泊、离泊、移泊的法律和技术行为[1]。这就需要引航员时刻掌握周围船舶、航道及水文气象信息,从而能够航行在特定的航线上。目前,已普遍使用的ARPA雷达、GPS导航定位等助航设备不能给引航员提供直观、精确、迅速的定位信息,引航员要靠目视和经验来协助引航,可是目视易受诸多因素的影响,如航道上航标亮度和海上能见度等因素,从而影响引航员做出正确的决策[2];又由于港口贸易的不断增长、船运量不断增多,港口附近航道环境变得越来越复杂。传统的引航模式已经不能满足业务发展的要求,这使得引航员面临更大的压力。尤其是在各种恶劣天气的影响下,表现更为突出,严重威胁船舶的安全航行和靠离泊,以及威胁着海上生态环境。为了有效地避免这些不利因素对船舶航行造成的不良影响,实现船舶安全运输航行,需要开发研究新技术、新设备以帮助引航员高效地进行引航。
基于此,本课题研究了船舶引航辅助系统。它是为引航工作专门设计的一种先进性装备,是对引航辅助手段的一大创新。该系统综合应用了AIS技术、差分GPS技术、WIFI技术,能将港口周围的航道、航线、水深、岸标、航标、灯浮等航行信息实时地显示在船载的电子海图或引航员携带的终端显示上;同时将周围配有AIS装备的船舶的航行信息也清晰地显示在电子海图或显示终端上。该系统为引航员提供更加详细、准确、实时的靠泊动态数据,辅助引航员更好地控制引航作业过程,提高工作效率和作业安全性,使引航员从过去纯粹凭经验靠感觉定势引航到利用先进设备数字定量引航。
1 引航辅助设备的发展
自2006年IMO提出E航海战略以来,船舶导航领域不断出现新的高科技产品,大型船舶靠泊的辅助设备也加快了其发展的速度。目前全世界的靠泊设备可以分为岸基与船基两种。岸基辅助靠泊仪通过安置在码头前端激光、声纳或雷达等探头采集信号回波,探测船与码头前沿的距离,从而得到各类精确数据,在一定程度上对靠泊船舶起到辅助作用[3]。但是由于它们存在作用距离短、设备维护麻烦、受天气因素影响大、只能提高相对于码头固定点的导航数据等缺点,使其不能很好的推广应用[3]。
早期的船基靠泊系统主要是根据多普勒计程仪测速原理制成的多普勒声呐靠泊系统(Doppler sonar docking system),可为船舶提供前进、后退和纵向速度,也可以提供船舶靠泊时船首、船尾的横移速度和方向,可有效提高船舶靠泊时的安全性[4],但是精度较低。当前船基靠泊仪多采用DGPS定位获取信息,国外有丹麦marinmateck公司的E-Sea Fix CAT 2&3、新西兰Navicome Dynamics公司生产的Harbor Pilot等。国外有些DGPS系统[5]可以采用实时动态差分法(RTK),可实现对船泊定位、转向角、航行速度等参数的计算。系统可全程(航道引航+靠泊)使用,具有精度高、安装方便的优点。系统可适用于任何一个码头,不受天气等不良因素的影响。
我国在这个领域的研究较少,本文研究的船舶引航辅助系统是综合应用了AIS、DGPS、WIFI等先进技术,能将引航工作所需要的各种信息准确、实时地显示在电子海图上,有效地帮助引航员引航,提高了引航工作的效率和安全。
2 系统组成
船舶引航辅助系统的组成包括AIS接收机、VHF接收机、DGPS接收机、Wifi发射机、系统电源模块、ARM9处理器模块和各子系统的接口模块,如图1所示。
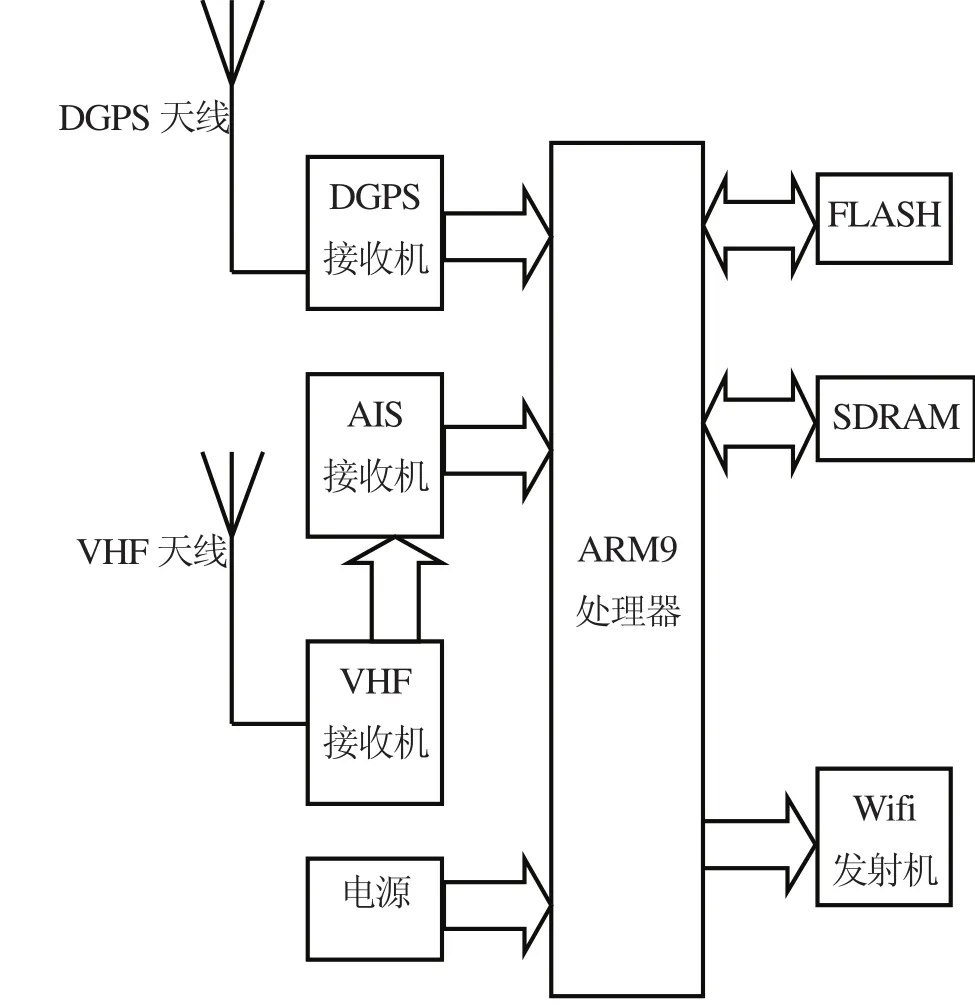
图1 船舶引航辅助系统的组成
2.1 AIS接收机模块
2.1.1 AIS技术
船舶自动识别系统(Automatic identification System AIS)是采用自控时分多址联接技术的助航设备,AIS在VHF频段上自动连续发送本船动态信息、静态信息、航次信息及安全短信息。同时也自动接收周围船舶发出的这些信息,并与岸基台站进行信息交换[6]。AIS的主要功能是将船舶的标识信息、位置信息、运动参数和航行状态等与船舶航行安全有关的重要数据,通过VHF数据链路,传输给周围的船舶,同时也自动接收周围船舶发来的这些信息,以实现对本海区船舶的识别和监视[6]。国际海事组织(IMO)规定,国际航线的 300GT以上的船舶和航行于国内航线的500GT以上的船舶,从2002年7月1日到2008年7月1日止分阶段安装AIS设备。中国海事局2005年10月14日颁布通知规定“沿海航行的所有客船、500GT及以上的油船、危险化学品船、集装箱船必须于2006年4月30日前配备船载自动识别系统[7]。”由以上规定可看出,目前沿海与内河航行的大多数船舶都已配备了 AIS设备,为船舶引航辅助系统的应用提供了硬件基础。
2.1.2 AIS接收机
AIS接收机的输入信号是来自VHF接收机,输出的是AIS的标准信号,符合IEC61162标准。其主要作用是接收船舶周围的他船动态、静态信息,并进行信息处理和显示。船舶引航系统充分的应用AIS信息,在显示终端电子海图上显示所有AIS信息,使引航员直观的获得他船信息。AIS的物理层要求的数据调制方式是 GMSK。GMSK(Gaussian filtered MSK)是高斯最小频移键控的简称,是在 MSK调制信号的基础上发展起来的。其中,HDLC数据解包分为去起始位、终止位、训练码,然后再去零,字节取反,CRC校验等后输出AIS标准信号[8-9],如图2所示。

图2 AIS接收机模块
2.2 VHF接收模块
VHF接收机一般由VHF天线、中频带通滤波器、低噪声放大器、宽带放大器、可变增益放大器、自动增益控制单元、FM正交解调器、本征频率合成器等几个部分组成。根据国际海事组织(IMO)有关标准的规定,对该接收机的基本要求是,在25 kHz信道20% PER时的接收灵敏度为-107dBm;接收频率范围在156.025MHz~162.025MHz之间;邻信道选择性优于70.0dB;对接收的VHF信号能够进行FM正交解调,并输出I、Q两路正交信号给AIS主处理器以进行GMSK解调及信息解码等后续处理,如图3所示。

图3 VHF接收模块
2.3 DGPS接收机
2.3.1 DGPS技术
DGPS即差分全球定位系统(Differential Global Position System,简称DGPS),是在GPS的基础上利用差分技术使用户能够从 GPS系统中获得更高的精度。GPS差分定位的方式通常有伪距差分和相位差分等方式[10]。目前我过主要港口引航定位都采用伪距差分定位的方式。伪距差分原理是由固定位置的基准站的GPS接收机接收卫星信号,计算出它至卫星的距离,将计算出的距离与含有误差的测量值加以比较,利用 滤波器将此差值滤波并求出其偏差,同时将所有卫星的测距误差传输给附近用户,用户利用此测距误差来改正测量的伪距,通过伪距的解算消除公众误差,提高定位精度[11]。我国海事局在我国沿海设置了13个伪距差分信号标台,发布伪距差分信号,供沿海船舶GPS差分定位。港口船舶导航系统通过DGPS高精度定位获得定位精度在10米以内的定位信息,满足港口引航对定位高精度的要求。实现安全定位导航。
2.3.2 DGPS接收机
从DGPS天线上接收到的MSK调制波经射频前端放大和滤波后,输出到A/D变换器。在DSP控制下,射频信号被采样,采样数据被送到DSP,进行下变频、滤波、解调、解码等数字信号处理,输出RTCMSC-104格式串行数字信号和显示控制信号。EPROM用于存储DSP的主程序。
2.4 Wifi发射机
2.4.1 Wifi技术
WIFI全称Wireless Fidelity,实际上是一种商业认证,具有Wi-Fi认证的产品符合IEEE802.11a/b/g/n无线网络规范,它是当前应用最为广泛的WLAN标准,一般工作在2.4GHz频段[12]。目前最新标准是 2009年得到批准的Ieee802.11n。802.11n可以将 WLAN的传输速率由54Mbps,提高到 300Mbps,甚至高达 600Mbps,信号的覆盖范围也扩大到好几平方公里。
2.4.2 Wifi发射机
采用单独大功率发送,接收放大电路设计,使信号双工增强 wifi模块,发送单独大功率芯片以及接收放大电路。支持软件 AP模式与station两种模式;支持GPIO控制开/关WiFi模块功能;数据通信时支持LED闪烁指示控制;支持两种工作模式:Infrastructure Mode和Ad Hoc Mode。
2.5 ARM9模块
本系统硬件部分的CPU采用了三星公司的S3C2440,其它部分包括扩展 Flash、SDRAM、串口、以太网口、USB接口以及相关的接口电路,如图4所示。
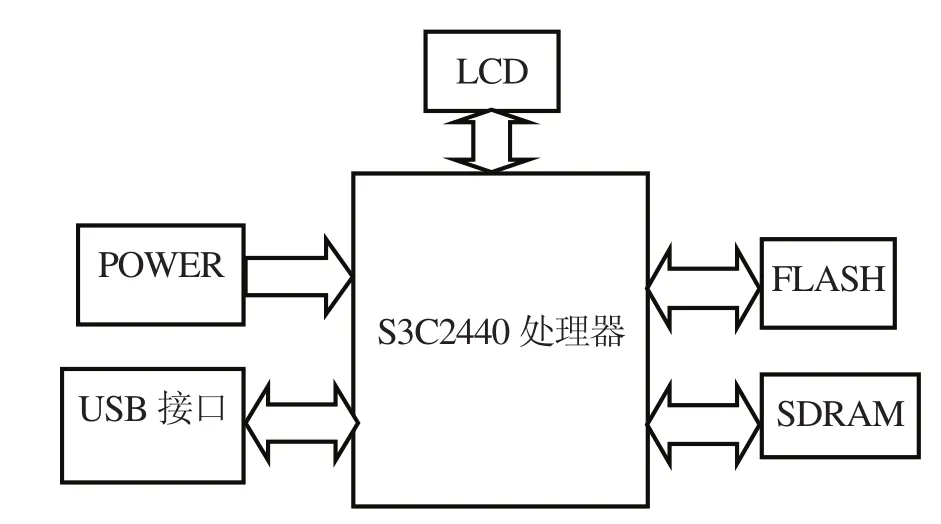
图4 ARM9模块
2.6 系统电源模块
电源模块负责给ARM9系统、DGPS接收机、AIS接收机、wifi模块等供电,实现供电时间不低于24小时。
3 系统实现的功能
该系统综合应用了AIS技术、DGPS技术、WIFI技术等先进技术,用于引导大型船舶安全靠离泊,避免冲撞码头,从而造成码头和船舶的损坏。
3.1 地图操作
该系统提供了地图放大、缩小、平移、还原等基础操作,还提供中心显示、范围显示等位置定位功能。
3.2 船舶、影像显示
该系统还支持对船舶的矢量线、轨迹、船名、呼号、MMSI号等标注提供显示隐藏控制。根据船舶类型,系统通过不同颜色来绘制不同类型的船舶,使用户能够直观地察看各种类型船舶的分布情况和航行动态。船舶类型主要分为在引船、拖轮、轮渡、引航艇等。
该系统支持以影像作为背景图和电子海图两种模式显示。以遥感影像作为背景图时,可以选择叠加航道、航标、泊位、锚地、水深点等助航要素信息,形成一套虚拟的、更加直观的“电子海图”,从而为引航员和调度管理人员提供引航调度的辅助支持[13]。
3.3 作业模式切换
该系统支持在实时监控、实时引航、历史导航三种作业模式之间自由切换。1)缺省情况下是处在实时引航作业模式。实时引航状态下,本船将叠加显示罗经圈,同时系统也会实时计算鼠标位置与本船位置之间的距离,方便引航员作业时的航行指挥。另外,为适应引航员的操作习惯,系统还提供了自由显示、中心显示、偏心显示等三种显示模式,以控制本船在窗口中的显示位置,以方便引航员进行观察和引航作业参考;2)在实时监控作业模式下,系统通过连接中心数据服务系统,及时获取海上船舶动态数据,并根据每艘船不同的资料数据,显示出不同的颜色、形状、大小、矢量线、轨迹线等,从而实现对近海域所有船舶进行监控,并进行任意自由的操作。在实时引航作业模式下,系统一方面可以通过中心数据服务系统获取船舶动态数据,另一方面还可以通过蓝牙连接外置DGPS设备或船载AIS Pilot-Plug设备来获取船舶动态数据,选择需要引航的船舶作为本船。系统将实时反映本船的位置、航速、航向等信息;3)在历史导航作业模式下,系统可以选择历史某一引航记录数据文件,进行回放模拟,可暂停、继续及切换模拟速率,以供引航员、管理人员等进行事后查看、学习、分析。
3.4 查询信息功能
引航员或引航调度员可根据实际业务需要查询被引船舶信息、定位信息、调度计划、泊位信息、潮汐信息等。
3.5 靠泊设置与模式切换
能够针对大型船舶进行靠泊参数设置,如船长、船宽、靠泊设备位置、进入靠泊模式的条件等信息。该系统能够根据靠泊模式条件自动进行靠泊模式和引航模式的切换,比如设定船舶离码头距离小于10个船宽,则在船舶离码头距离小于10个船宽时自动进入靠泊模式,系统将以特殊的窗口来精确显示靠泊过程中本船的各种动态数据和水域环境信息。
3.6 靠泊报警
该系统能够根据探测设备测量的数据计算船舶动态数据,同时能够监测风速风向、流速流向等环境数据,如果周围的环境恶劣不适于船舶靠泊,可启动安全警报。当船舶靠泊速度过快或角度过大会显示报警信号,提醒现场操作员注意,防止损坏码头(船舶)设施的意外事故发生。
4 应用实例
船舶引航辅助系统的研发主要是为港口引航站的引航工作服务,向引航员提供周围船舶的实时动态,并将航道、航标、水深、锚地、泊位等重要航行环境数据准确、及时地显示在电子海图或引航员的终端显示上,以更好地帮助引航员引航。
以唐山港为例,唐山港是一个新兴的、年轻的、充满活力的港口,也是一个快速成长的港口。进港船舶的尺度、吨位都不断增长,这对引航技术和引航安全提出了新的考验,引航工作量越来越繁重、越来越复杂。为了解决这一现实问题,更好地控制引航作业过程,提高引航作业安全性,唐山港投入并使用了船舶引航辅助系统这一高科技设备。当有大型船舶靠泊时,通过靠泊仪显示终端可以将被引船舶航向、船首、船尾的速度等信息清晰、直观地显示出来,以辅助引航员做出准确、合理的判断。
5 结束语
船舶引航航辅助系统充分应用了目前国内外先进的AIS技术、DGPS技术、WIFI技术等先进技术,考虑了船舶引航的实际需要,将引航工作所需要的港口航道、航线、水深、浮灯、航标、锚地、泊位等相关数据信息在电子海图或显示终端上清晰、直观地综合显示。本系统是一套经济、适用、便携的船舶引航辅助系统,为引航员提供高效安全的引航技术保障。通过在唐山港口的使用实践表明,辅助引航系统设计科学合理,功能强大,比较适合引航工作的需要,为引航员提供更加详细、准确、实时的靠泊动态数据,辅助引航员更好地控制引航作业过程,提高工作效率和作业安全性,使引航员从过去纯粹凭经验靠感觉定势引航到利用先进设备数字定量引航,且应用前景广阔。
[1]范晓飚,刘元丰.航道与引航[M]. 大连:大连海事大学出版社, 2006.
[2]邓涛.现代船舶发展趋势[C]. 中国航海协会.1995-2009航海技术论文选集第2集.
[3]刘洋,彭国均,张杏谷,等.基于 AIS的新一代船舶引航系统[J]. 中国海运, 2011, 34(6): 50-53.
[4]陈航.激光靠泊技术研究与工程实现[D]. 大连:大连理工大学, 2005: 4-4.
[5]HiroyukiOda,Etsuro Okuyama,Yasushi Kawamori. New Berthing Support System Using High Accuracy Differential GPS[J]. JIME. 2009, 44(1).
[6]于志明. AIS技术在港口引航中的应用分析[J]. 中国水运, 2012, 12(11): 11-12.
[7]陆悦铭.基于AIS的船舶引航和避碰[C]. 航海技术实践论文集.
[8]朱金发等编译.船载自动识别系统手册[M]. 北京:人民交通出版社, 2005.
[9]INTERNATIONAL MARITIME ORGANIZATION.Ref T2/8.02 Guidelines for the Installation of a Shipborne Automatic Identification System (AIS)[S].London; [s.n.], 2003.
[10]丁天冰.基于 DGPS、AIS、GPRS 的船舶导航与监控系统[J]. 世界航运, 2006, 29( 3): 48-49.
[11]兰培真,韩斌,陈伯雄,等.基于 AIS的港口船舶系统的研究[J]. 中国航海, 2007(3): 17-20.
[12]李晓阳. WIFI技术及其应用[J]. 信息技术, 2012(2):196-198.
[13]彭国均,柯冉绚,陈金海. E-Navigation 架构下船舶引航系统[J]. 集美大学学报:自然科学版, 2012,17(3):190-194.
Research and Implementation of Ancillary System of the Ship Pilot
JIA Wei1, PENG Guo-jun2, WEI Wu-cai2, TONG Jie2
(1. TangShan port pilot station, Tangshan 063611, China; 2. Ship Navigation-Aids Technique Institute of JiMei University, Xiamen 361021, China)
In recent years, the number of vessels which enter and leave port is increasing, and the scale of ships is getting bigger and bigger. The pilot workload is thus increased, especially when the weather is not good. In order to achieve safety pilot in poor visibility environment, the pilot ancillary system is researched and implemented by analyzing the actual pilot business needs. Combined with AIS, DGPS and WIFI technology, this system could provide high-precision dynamic information of the berthing process. The security and efficiency of large vessel’s berthing process are effectively improved.
pilot; auxiliary berthing; AIS technology; DGPS technology
U666
A
贾炜(1977-),男,中级职称。研究方向:引航技能与技术。