四轮独立驱动电动汽车稳定性仿真研究
2014-10-15李洁莹
李洁莹
(上海燃料电池汽车动力系统有限公司,上海201804)
0 引言
电动汽车的驱动电机响应快、易于控制,且较内燃机汽车的机械传动效率高,因此可以开发出低成本、性能理想的电动汽车底盘系统,提高电动汽车性价比,加速电动汽车的普及。而电动轮驱动技术是实现上述目标、解决目前电动汽车发展障碍的理想途径。在车辆的稳定性研究中,主动转向技术、主动悬架技术与驱动力/制动力控制是当前所主要采用的方法。本文从四轮独立驱动电动车角度出发研究的稳定性控制策略对以后掌握采用四轮独立驱动的电动汽车的关键技术和形成自主开发能力具有指导意义。
1 汽车稳定性因素分析
当前的汽车稳定性控制理念是选取汽车的横摆角速度和质心侧偏角2个变量作为汽车稳定性的控制目标,通过一定的调节措施使得汽车的横摆角速度和质心侧偏角处于普通驾驶员的控制范围内。选取这2个变量表征汽车操纵稳定性的原因如下:汽车行驶状态主要由纵向速度、侧向速度和横摆角速度确定。纵向速度与侧向速度确定汽车质心的侧偏角,横摆角速度的积分得到汽车的横摆角,而质心侧偏角与横摆角之和为汽车行驶的航向角。假设汽车的质心侧偏角较小,可忽略不计,则汽车的航向角主要由汽车的横摆角决定。航向角越大,汽车的转弯半径越小;航向角越小,汽车的转弯半径越大。因此,在质心侧偏角比较小的情况下,横摆角速度决定了汽车的稳定状态。但是当汽车处于低附着路面上,转弯时出现大的质心侧偏角时,横摆角速度就不能准确地表述汽车的稳定状态。这个时候质心侧偏角更能体现汽车的稳定性。相关文献也指出,质心侧偏角对于车辆稳定性控制必不可少。
通过上述分析,可以得到以下结论:(1)车辆稳定性主要受车辆质心侧偏角与横摆角速度影响,二者之间存在耦合关系,汽车转向的过度、不足均可由车辆横摆角速度表示。另外,汽车转向过度还可以由车辆质心侧偏角表示。(2)车辆稳定性的重要影响因素包括车辆质心侧偏角,车辆质心侧偏角越是增大,司机转动方向盘时越是感到沉重吃力,车辆的侧向力矩、横摆力矩也就越加难以控制,从而易造成车辆失控。(3)车辆质心侧偏角与附着系数有关,质心侧偏角最大值会随着附着系数的减小而减小,即车辆稳定性受质心侧偏角的影响增大。(4)车辆质心侧偏角偏大,车辆转向的特征,即司机驾驶意向,可由车辆横摆角速度表示;但如果车辆质心侧偏角偏小,车辆行驶轨迹则无法由横摆角速度表示。
综上所述,本文选择横摆角速度和质心侧偏角联合作为表征汽车操纵稳定性的变量进行控制。
2 四轮独立驱动电动汽车稳定性控制策略
根据本文研究的车辆的特点以及稳定性控制策略的总体方案,确定稳定性控制策略分为3个步骤,即判断、控制、执行。
第一步,判断汽车是否失稳。
第二步,根据上一步的判断,如果确定汽车失稳,那么按照分层结构进行控制。先确定使汽车恢复稳定所需的总控制量即附加横摆力矩ΔM,再通过相应的控制策略决策出各个车轮应该有什么样的滑移率/滑转率,以期使车辆受到地面施加的期望的附加横摆力矩ΔM。
第三步,通过控制驱动电机,将车轮的滑移率/滑转率控制在期望值。
完整的稳定性控制策略总体方案如图1所示。
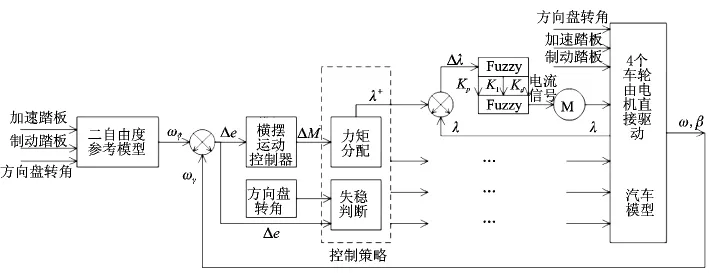
图1 控制策略流程图
根据当前驾驶员的操作,通过二自由度参考模型计算出当前汽车理想的横摆角速度,与实际的横摆角速度做差得到横摆角速度偏差,输入失稳判断模块。失稳判断模块需要的信号还有:实际的质心侧偏角、方向盘转角、路面附着系数、车速、侧向加速度;失稳判断模块通过判断汽车是过度转向失稳还是不足转向失稳,将结果输入力矩分配模块。横摆运动控制器根据横摆角速度偏差计算出的期望附加横摆力矩也输入力矩分配模块,力矩分配模块根据所得的数据决策出每个车轮期望的滑移率/滑转率λ*,与实际的滑移率/滑转率λ做差得到Δλ。因为轮胎受到的驱动力和制动力与滑转率/滑移率是非线性关系,而且车轮的力矩不能直接控制,需要通过电流信号改变电机的输出转矩。要直接写出关于滑移率/滑转率和电机电流的精确数学模型比较困难,所以采用简单的鲁棒性较强的PID控制器来得到电机的驱动电流。最终由电机驱动车轮,改变汽车的行驶状态。
3 控制策略的适用范围
本文所研究的控制策略的适用范围与底层执行机构的能力有关,驱动和制动都是由电机实现的,曲线表达式如下:

式中,n为电机转速;δ为加速踏板开度;Mmax为电机发出的峰值力矩;M为实际发出的驱动力矩。
电机可以进行电制动,根据实际情况,电机制动力矩最大可以达到驱动力矩的90%左右,本文假设电机最大制动力矩为驱动力矩的85%。制动力矩如下式:

当加速踏板开度为100%时,最大的电机驱动力矩为45N·m,乘以减速比5.2得到车轮受到的最大驱动力矩为234N·m。最大制动力矩为199N·m,最大的驱动扭矩只有在低速时电机才能提供。当电机转速增加时,电机的反电动势会提高,使电机输出的力矩降低。所以,由电制动和电驱动产生的最大附加横摆力矩也会相应减小。
本文所设计的控制策略是主动安全控制策略,当驾驶员踩加速踏板的时候可以起作用,当驾驶员不踩油门踏板时也起作用,但是当驾驶员踩制动踏板时本文设计的控制策略不对汽车进行控制,因为当汽车失稳时控制策略要求驱动某一车轮,这会与汽车的液压制动系统产生干涉,所以当驾驶员踩制动踏板时控制策略不起作用。
4 仿真实验及分析
通过对比装有SCS(稳定性控制策略)的四轮独立驱动电动汽车和不装SCS的普通四轮独立驱动电动汽车的运动,来检验所设计的控制策略的有效性。实验路径为半径为20m的圆环轨道,路的宽度为16m,轨道如图2所示。
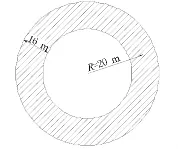
图2 道路简图
路面附着系数为1.0。汽车缓慢加速,经过5s将加速踏板踩到开度为80%,之后保持加速踏板的开度。本实验是闭环实验,通过CarMaker自带驾驶员保持汽车行驶在道路中央。对比装有SCS的车辆和不装SCS的车辆的运动。根据本文设计的控制策略对各个电机进行单独控制,如图3所示。
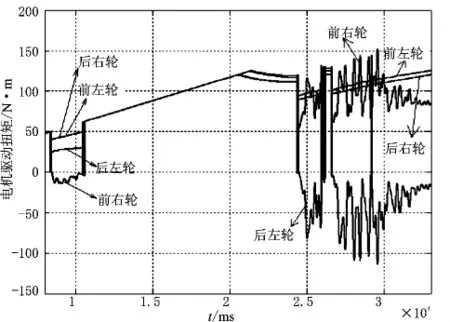
图3 各个电机驱动扭矩分析
从图3可以看出,第24s后出现向左不足转向,此时对右前轮进行驱动、对左后轮进行制动来减小汽车的不足转向。控制策略起到了保持稳定的控制效果,但是汽车的车速有所降低,如图4所示,在第10s时施加控制的汽车车速小于未施加控制的汽车。从图中可以看出,此时车速仅为5km/h。如果汽车的车速很低,可以在出现失稳时通过驱动某一个或几个车轮进行调整,而不采用制动进行调整。

图4 汽车速度对比
5 结语
现如今,发展新能源汽车尤其是纯电动汽车成为了热门话题。在当前众多形式的电动车辆中,采用电动轮独立驱动的动力系统正日益成为发展方向,它因布局灵活、动力独立可控、性能优越等特点得到了广泛的研究和应用。
[1]顾燕,王萍.浅谈四轮独立驱动控制在微型纯电动汽车上的应用[J].机电信息,2009(36)
[2]程军.车辆动力学控制的模拟[J].汽车工程,1999(4)
[3]张缓缓.采用电动轮驱动的电动汽车转矩协调控制研究[D]:[博士学位论文].吉林大学,2009
[4]孙颖.汽车电子稳定系统控制方法的研究和仿真[D]:[硕士学位论文].东北大学,2008
[5]付皓.汽车电子稳定性系统质心侧偏角估计与控制策略研究[D]:[博士学位论文].吉林大学,2008
