“MMA”技术路线在太湖蓝藻水华监测中的应用
2014-10-12张虎军沈建荣
庄 严,黄 君,宋 挺,张虎军,沈建荣
无锡市环境监测中心站,江苏无锡214121
3S技术是遥感技术(RS)、地理信息系统(GIS)和全球定位系统(GPS)的统称,是空间技术、传感器技术、卫星定位与导航技术以及计算机技术、通讯技术相结合,多学科高度集成的对空间信息进行采集、处理、管理、分析、表达、传播和应用的现代信息技术[1-2]。现已广泛应用于交通建设[3]、资源勘探[4]、地质调查[5-6]、灾害预警[7]、评估建模[8-9]等领域。在环境方面的应用(如对湖泊水质、营养状态、藻类等[10-15])亦趋于多样与成熟。
太湖为中国典型的富营养型湖泊,自20世纪80年代随着周边城市经济的发展,太湖水环境急剧恶化,藻类水华频发[16]。太湖水环境监测、预警、治理过程中,3S技术的应用正逐步开展,并越来越受到关注。以太湖蓝藻水华监测为例,在整合3S技术的基础上,提出“MMA”技术路线,划分为监测、测绘、分析等关键步骤对太湖水华情况进行研究。在水华监测中将GPS、GIS和RS技术相互穿插、综合应用,发挥各项技术特长,弥补以往单项技术研究的局限性,从多方面比对分析太湖蓝藻水华情况,为湖泊水华监测乃至其他环境因素监测提供参考。
1 实验部分
1.1 地面监测
在太湖布设20个点位(图1),于2011—2012年每月水路监测叶绿素 a(Chl-a)、蓝藻密度(CBD)等项目。Chl-a监测方法参照《水和废水监测分析方法》(第四版)中的测定方法[17],CBD采用6600型多参数测定仪(美国)测定。

图1 太湖采样点位示意图
6600型多参数测定仪适用于淡水、海水或被污染水等工作环境,其主要参数:工作温度-5~45℃,监测深度为 0~200 m,主机重量为3.18 kg,电脑接口 RS232C、SDI-12,存储量为384字节(150 000个单参数读数)。测定仪安装有WT、pH、DO、深度、藻蓝蛋白等传感器,其中,测定蓝绿藻密度的为6131型藻蓝蛋白传感器,其工作原理为通过对蓝藻体内特有的藻蓝蛋白发出的荧光定量来实现对蓝藻的定量。该项监测技术为目前太湖蓝藻密度自动在线监测的重要方法[18],对今后蓝藻在线监测研究与推广具有指导性意义。
1.2 遥感与分析
太湖遥感监测通过多种渠道获取太湖流域卫星影像数据,主要数据来源为Terra和Aqua卫星,其搭载了MODIS中分辨率传感器,分辨率为250 m,波谱范围为 0.4~14.4 μm,有 36 个离散光谱波段,成像带宽为2 330 km。
对所收集的遥感影像数据进行解译。在异常天气条件下(如阴雨多云天气),遥感影像图层中有较厚云层覆盖时,此遥感影像图层无法用于遥感解译;当发现遥感影像图层中有较薄或局部云层覆盖时,通过大气辐射校正后,此遥感影像图层仍可用于遥感解译。遥感解译方法为目视解译法与非监督性监测相结合,并经过环保、气象等部门会商、核对,确保遥感监测结果的统一性。
对地面监测及遥感监测数据进行汇总处理。所用分析软件为ArcGIS软件,在分析、绘图中的常用功能包括了 ArcView、ArcMap、ArcEditor、ArcToolbox等,用于监测数据的可视化、制图、矢量处理、空间分析等方法步骤。
2 技术路线
2.1 “MMA”技术路线概念
在以往应用3S技术研究太湖蓝藻水华时,会出现分析结果差异的情况:①应用GPS、GIS技术监测蓝藻水华CBD与Chl-a时,根据湖库监测垂线采样点的设置规范[19],仪器测定与水样采集均为水面下0.5m处,故能监测到混合于水体中的蓝藻情况。②RS监测的原理是基于被测水体的光谱特征,水体中蓝藻有无及浓度差异,使水体颜色、密度、透明度等产生差异,从而使传感器上接收到的反射光谱特征存在差异,在遥感图像上反映为色调、灰阶、形态、纹理等特征的差别,RS影像数据更能反映水面表层或浅水层蓝藻水华情况。因此在蓝藻总量一定的情况下,当风速较低、水面平静时,蓝藻易浮于水表,而使CBD与Chl-a浓度所测数据较低,此时RS图能较好地反映水华空间分布情况;当风速较大、水体搅动时,蓝藻分散于水体中,而使RS影像难以监测到水华,此时GIS图能较好地反映水华空间分布情况。因此,在蓝藻监测中须综合应用3S技术,弥补各项技术存在的不足。
“MMA”技术路线是将3S技术综合应用于蓝藻监测工作的方法,包括了监测、测绘、分析等关键研究步骤。总结以往单项技术研究中的特长与不足,综合应用GPS、GIS、RS技术,减少或避免单项技术研究结果所造成的局限性、片面性,能更全面、真实地反映蓝藻水华情况,为预警治理、决策施行提供全面综合的技术支撑。该技术路线既适用于水华监测,亦可推广至其他环境监测工作,技术步骤详见图2。
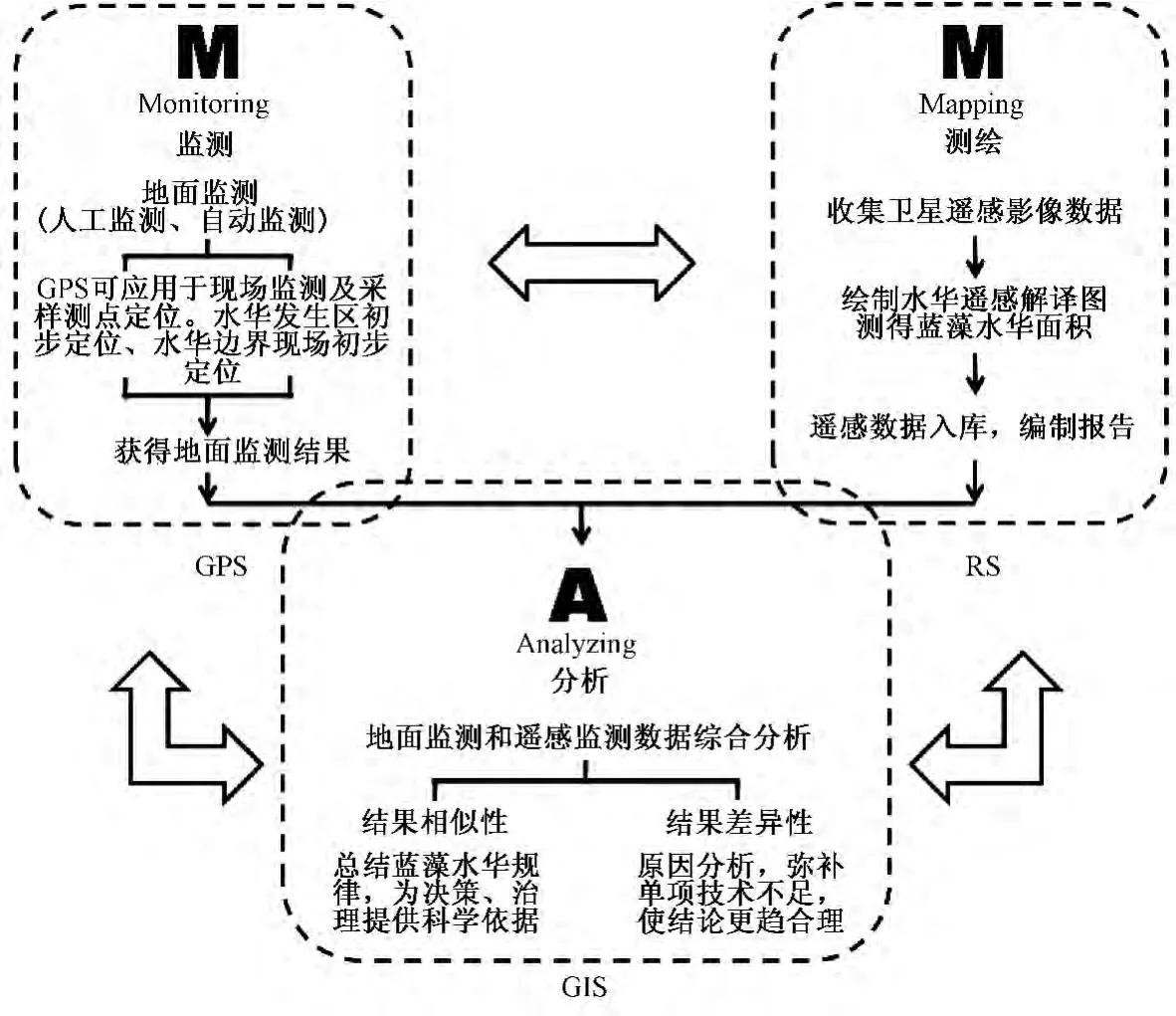
图2 “MMA”技术路线示意图
2.2 “MMA”技术路线步骤
2.2.1 监测
监测包括人工监测与自动监测等途径。GPS技术可应用于现场监测与采样,包括测点定位、蓝藻水华发生区的初步定位、水华边界现场初步定位等。应用GPS技术对太湖蓝藻监测,能较精确地定位经纬度,从而保证采样与监测数据的延续性、可比性。需要指出的是,由于太湖面域广阔、横跨江浙,受自动监测测定方法、试剂更换、仪器稳定性、安全维护等影响,难以全面布设自动监测站点,故目前太湖监测仍以人工监测为主。自动监测是今后水环境监测工作的重要研发方向,若技术成熟、成本降低时,自动监测将发挥巨大作用,人工监测频次低、范围小、受限多等短板将得以弥补。界时,蓝藻水华综合分析结果将更趋全面、真实。
2.2.2 测绘
测绘是应用RS技术,从宏观角度监测蓝藻水华空间分布情况,同时该技术可应用于对遥感影像数据解译后,测绘出蓝藻水华发生区域、计算水华面积,同时对历史数据进行汇总,结合GIS技术,统计水华面积、频次、多发区等信息。
主要有5个步骤:①通过多种渠道获取太湖流域EOS、MODIS数据、环境一号卫星数据等卫星影像数据;②将下载的遥感影像图进行投影转化和几何纠正,剔除云层覆盖的遥感图;③人机交互解译蓝藻信息,利用NDVI指数表征湖面蓝藻聚集情况,设定蓝藻聚集的阈值,并结合人工目视解译确定阈值,生成蓝藻聚集的SHP文件,目前该步骤工作通过环保、气象等部门会商,确保监测结果的统一性;④利用ArcGIS提取SHP文件面积属性,汇总太湖各水域蓝藻聚集情况;⑤数据收集入库,编制报告。
2.2.3 分析
分析是“MMA”技术路线的关键步骤,是综合应用3S技术,总结蓝藻水华研究成果的综合性分析。应用GIS技术将现场监测数据、实验室检测数据、遥感监测数据等进行综合分析。在蓝藻水华监测中,一方面可将CBD、Chl-a等指标数据通过内插值法,绘制浓度分布图,得到现场及实验室数据分析结果;一方面可将遥感图进行处理,绘制蓝藻水华频率图。
频率图制作主要有5个步骤:①对每次遥感解译获得的蓝藻聚集SHP文件进行“Conversion Tools→to shapefile”转化;②转化后的文件添加一个字段,字段名为L+日期(1号为L01),赋值字段=1;③将所有SHP图层进行“Analysis Tools→Union”合并,对新生成的 SHP图层增加字段Times(频次),赋值 Times=L01+L02+ …LN;④根据Times的值将图层合并,赋予不同Times值以不同水华频率的名称和颜色,其中,水华频率计算公式为水华发生频率=出现水华的天数/监测总天数(如在4—10月的214 d监测总天数中,出现10次水华,水华频率即为4.7%)。赋值的颜色越深,代表水华发生频率越高;⑤频次图修饰(如添加比例尺、经纬度等)。
将以上各类数据结果进行核验比对,形成水华分析报告,全面掌握蓝藻水华情况。该方法可拓展至水质指标、富营养化指标等分析,为下阶段工作、决策提供更趋真实的结论参考。
3 应用案例
3.1 太湖蓝藻人工监测
2011—2012年对太湖蓝藻进行逐月监测,结果见图3和图4。
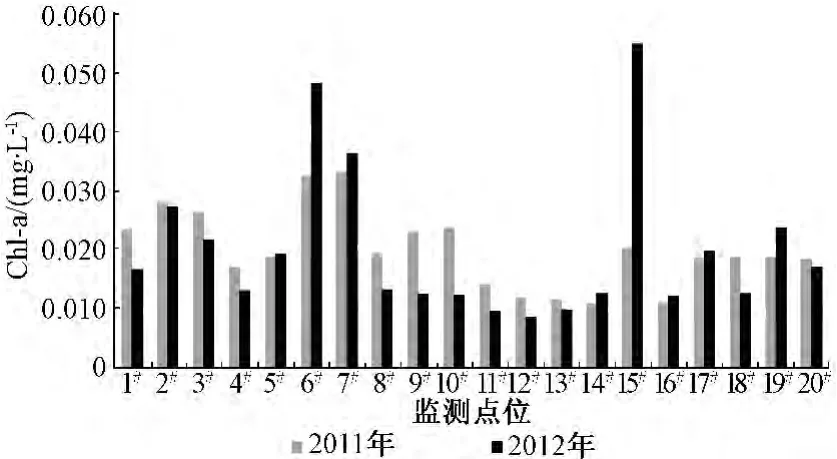
图3 2011—2012年太湖20个点位Chl-a浓度对比
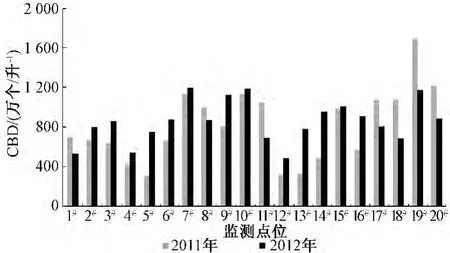
图4 2011—2012年太湖20个点位CBD对比
由图3、图4可见,2011—2012年太湖 Chl-a年均浓度值均为0.020 mg/L,20个点位的Chl-a年均值浓度范围为0.009~0.055 mg/L,最小值出现在太湖东部的12#点位,最大值为湖心区的15#点位;CBD年均值分别为815、855万个/升,20个点位CBD范围为313~1 690万个/升,最小值出现在太湖东北部的5#点位,最大值出现在湖心区的19#点位。可以看到,EXCEL软件常规处理后的监测数据相对分散,各点位间横向比较时难以直观反映太湖蓝藻的空间分布情况,故需进一步应用GIS技术对数据进行分析。
3.2 太湖蓝藻遥感监测
2011—2012年的4—10月,每日对太湖遥感影像数据进行收集和解译。根据“MMA”技术路线“测绘”中的主要步骤,得每日太湖蓝藻水华面积。将解译图和数据汇总入库,得太湖月度和年度水华遥感监测结果(图5)。
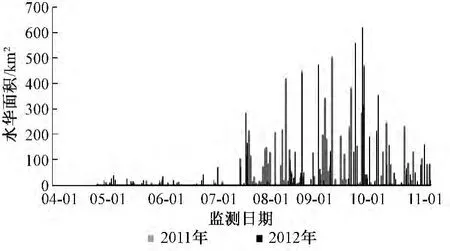
图5 2011—2012年太湖水华面积统计
从图5可以看到,太湖蓝藻水华于5月初前后发生,但频次和面积较低,至6月底的平均水华面积仅为12 km2,7月中下旬随着温度升高,水华频次和面积均急剧上升,2011—2012年水华最大面积分别为501、621 km2,水华集中暴发的8—10月(92 d)间的水华发生天数分别为52、43 d。可以看到,遥感测绘能追踪水华发生情况,掌握水华面积的时间变化趋势,但空间分布仅能反映当日情况,需进一步应用GIS软件对月度、年度情况进行汇总分析。
3.3 太湖蓝藻监测结果综合分析
汇总处理前期数据,并参照“MMA”技术路线“分析”中的主要步骤,将监测数据和遥感数据进行处理绘图得2011—2012年太湖CBD、Chl-a浓度、水华频率分布情况(图6~图11、表1)。

图6 2011年太湖Chl-a分布图
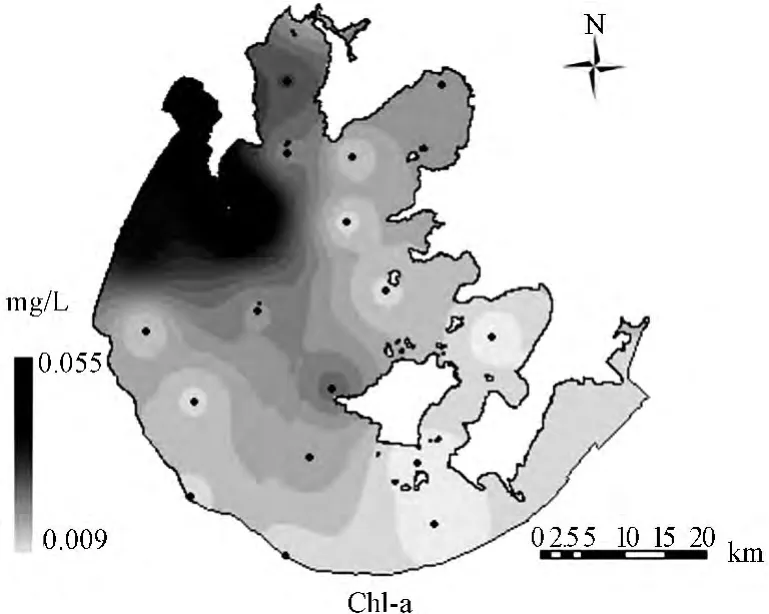
图7 2012年太湖Chl-a分布图
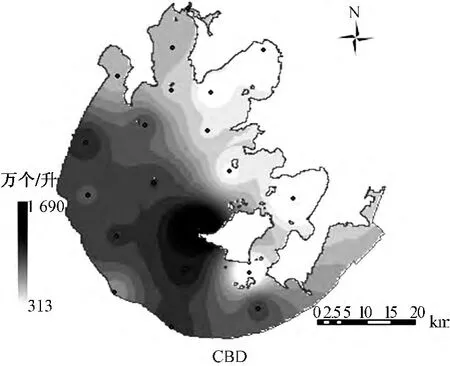
图8 2011年太湖CBD分布图

图9 2012年太湖CBD分布图

图10 2011年太湖蓝藻水华频率分布图

图11 2012年太湖蓝藻水华频率分布图
从图6、图7可见,太湖Chl-a浓度总体呈现“西高东低”的分布规律,2012年最为明显,峰值为靠近西部的15#点位,谷值为东部的12#点位。Chl-a浓度大于 0.02 mg/L 的点位有 1#、2#、3#、6#、7#、9#、10#、15#、19#,分布于梅梁湖至湖州的太湖西部沿岸和湖心区。
图8、图9显示,CBD分布特点与Chl-a相似,但又有所区别。太湖CBD在西部、南部和湖心区较高,东部较低。南部 9#、10#、11#点位,湖心区17#、18#、19#、20#点位和西部 7#点位的 CBD 年均值大于1 000万个/升,峰值为湖心区的19#点位,谷值为东北部的5#点位。
图10、图11显示,蓝藻水华频率亦呈“西高东低”的分布规律,沿岸带水华频率高于湖心区。
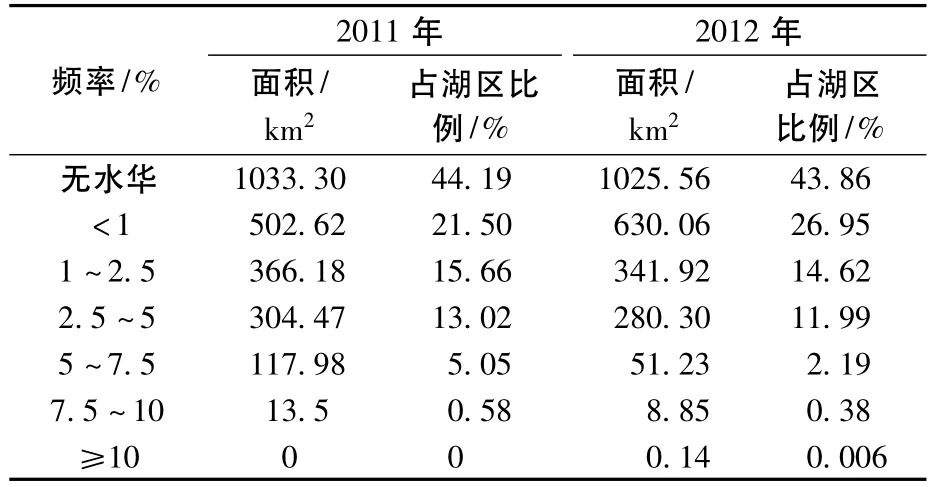
表1 2011—2012年太湖蓝藻暴发频率及面积统计
由表1可见,太湖出现蓝藻水华区域的频率多小于10%(即214个总监测日中,水华频次小于20 d),水华频率小于10%的面积为1 304.75、1 312.36 km2,分别占全太湖总面积(2 338 km2)的55.81%和56.13%;无水华的面积为1 033.30、1 025.56 km2,分别占全太湖总面积的44.19%和43.86%;水华频率大于等于10%的面积仅为2012年的0.14 km2,占全太湖总面积的0.006%,该区域位于太湖西部沿岸。
综上,总体规律一致,但又有所差异:①CBD、Chl-a及频率分布图结果均表明太湖蓝藻水华呈现“西高东低”的分布规律。夏季蓝藻多浮于水面或积聚于浅水层,受东南季风影响向西北部堆集,故西部发生水华的浓度和频率较高。该规律说明湖西区为太湖污染及蓝藻水华较严重区域,是预警与整治工作重点对象,其水环境改善将对太湖总体改善起重要作用。②湖心区19#点位CBD值全湖最高,Chl-a浓度大于0.02 mg/L;而遥感监测的频率图显示该点位附近区域为无水华或频率小于1%。湖心区蓝藻水华CBD和Chl-a较高的现象亦须引起重视,此结果差异可能是由于监测方法不同所造成。CBD与Chl-a均为监测水下0.5 m,而遥感监测是反映水面或浅表层的水华情况。故在应用3S技术监测蓝藻水华时,应参照“MMA”技术路线,综合分析各项结果,弥补单项技术存在的不足,并进行核验比对,使结论和建议更趋科学合理。
4 结论
“MMA”是应用3S技术进行蓝藻水华监测的一条有效技术路线,包括监测、测绘、分析等关键步骤。该路线能减少或避免单项研究结果的局限性、片面性,充分发挥3S技术各自特长,更全面、真实反映蓝藻水华情况,为预警治理、决策施行提供全面综合的技术支撑。该技术路线既适用于水华监测,亦可推广至其他环境监测工作。
根据2011—2012年太湖蓝藻水华的监测结果,Chl-a年均值浓度为0.020 mg/L,CBD年均值为815~855万个/升。水华一般发生于5月初前后,7月中下旬随着夏季温度升高,水华频次和面积均急剧上升,至10月中下旬逐渐减少。全太湖55.81%~56.13%的湖面为水华发生频率小于10%,44.19% ~43.86%的湖面为无水华,水华频率大于等于10%的面积仅为2012年的0.14 km2,占全太湖总面积的0.006%,该区域位于太湖西部沿岸。
综合分析发现,太湖水华总体规律一致,但又有所差异。一方面,CBD、Chl-a及水华频率分布均呈现“西高东低”的分布规律,湖西区为太湖污染及蓝藻水华较严重区域,是预警与整治工作重点对象;另一方面,湖心区CBD和Chl-a浓度亦较高,而遥感监测的频率图显示为无水华或频率小于1%,此结果差异可能是由于方法不同所造成,故“MMA”技术路线具有实际应用意义。
[1]李德仁.地理信息系统导论[M].北京:测绘出版社,1993:12-23.
[2]梅安新,秦起明,刘慧平.遥感导论[M].北京:高等教育出版社,2001:2-8.
[3]詹云军,李涯丽.RS、GIS技术在高等级公路工程勘察中的应用[J].山东工程学院学报,2002,16(4):65-68.
[4]孙立新,白喜庆.3S技术在矿山环境地质调查中的应用[J].中国煤田地质,2004,16(增刊):70-71.
[5]Pax L M,Woodcock C E,Collins J B.The status of agricultural lands in Egypt:the use of multitemporal NDVI features derived from Landsat TM[J].Remote Sens Environ,1996(56):8-20.
[6]Henry P.High-resolution wetland prospection,using GPS and GIS landscape studies at Sutton Common(South Yorkshire),and Meare Village East(Somerset) [J].Remote Sensing of Environment,2001(28):365-375.
[7]李剑萍.3S技术在灾害监测预测中的应用及展望[J].灾害学,2004,19(增刊):83-87.
[8]马建文,赵忠明,布和敖斯尔.遥感数据模型与处理方法[M].北京:中国科学技术出版社,2001.
[9]张继贤.“3S”支持下的滑坡地质灾害监测、评估与建模[J].测绘工程,2005,14(2):1-5.
[10]颜梅春,李耀曾.ASTER卫星影像在太湖水质空间分异分析中的应用[J].水资源保护,2007,23(6):28-31.
[11]Lavery P,Pattiaratchi C.Water quality monitoring in estuarine water using the landsat thematic mapper[J].Remote Sensing of Environment,1993,46(2):268-280.
[12]Gons H J.Optical teledetection of chlorophyll a in turbid inland waters[J].Environmental Science and Technology,1999,33(7):1 127-1 132.
[13]Bagheri S.Chlrorphyall-a estimation in New Jersey’s coastal waters using Thematic Mapper Data[J].Remote Sensing,1990,11(2):31-34.
[14]丰江帆,滕学伟.基于GIS的太湖蓝藻预警系统研究[J].环境科学与技术,2006,29(9):60-61.
[15]马荣华,孔繁翔,段洪涛,等.基于卫星遥感的太湖蓝藻水华时空分布规律认识[J].湖泊科学,2008,20(6):687-694.
[16]钱昊钟,赵巧华.太湖遥感反射率变化特征及其影响因素分析[J].国土资源遥感,2011,4(91):100-102.
[17]国家环境保护总局《水和废水监测分析方法》编委会.水和废水监测分析方法[M].4版.北京:中国环境科学出版社,2002:670-671.
[18]丁建清,张军毅.YSI6600传感器在太湖蓝藻预警工作中的应用[J].环境监测管理与技术,2011,23(1):67-69.
[19]HJ/T 91—2002 地表水和污水监测技术规范[S].质时空变化分析中的应用[J].资源科学,2009,31(3):42-434.
[24]GB 3838—2002 中华人民共和国地表水环境质量标准[S].
[25]刘永,阳平坚,盛虎,等.滇池流域水污染防治规划与富营养化控制战略研究[J].环境科学学报,2012,32(8):1 962-1 972.
[26]刘瑞志,朱丽娜,雷坤,等.滇池入湖河流“十一五”综合整治效果分析[J].环境污染与防治,2012,34(3):95-100.
