靠球减震系统在导管架平台中的应用
2014-10-11王梦川杨树耕唐友刚张建勇
王梦川,杨树耕,唐友刚,陈 涛,王 宁,张建勇
(1.天津大学水利仿真重点实验室,天津 300072;2.中海石油(中国)有限公司 垦利项目组,天津300457;3.中海油能源发展油建分公司工程设计研发中心,天津 300452)
位于渤海东部海域的一座导管架生产储油平台,采用5 000 t穿梭油轮直接靠泊卸油方案外输原油,油田范围内水深22 m。平台在油轮靠船和外输期间,如遇风浪天气,晃动非常明显,为了有效降低油轮靠船对平台的影响,提出新建靠船平台和在原平台V型护舷外增加靠球两种方案。由于第一种方案成本太高(约为1.4亿元人民币),最后确定采用增加靠球来降低油轮靠船对平台的影响。增加靠球后外输油轮的停泊状态如图1所示。为研究增加靠球后平台的减振效果,对没有靠球和增加靠球两种状态下导管架生产储油平台的结构动力响应进行分析计算,通过对比得到相应结论,为今后靠球系统在平台减震中的应用提供理论依据。
对于导管架平台现有的动力研究,王柳君[1]利用SAP有限元软件计算确定性波浪力作用下导管架平台的位移响应和将波浪作为静力载荷条件下的导管架位移响应,得到波浪力处理对导管架平台动力分析的影响;杨树耕[2]提出了有限元分析软件ANSYS在海洋工程中的应用;李茜等[3]用ANSYS程序对自升式平台结构进行动力分析;周广利等[4]利用有限元分析软件MSC/NASTRAN计算了导管架平台在施加外部激励作用下平台的动力响应特性;陈建民等[5]采用ANSYS/LS-DYNA有限元程序对导管架平台进行船舶碰撞动力分析,得出了碰撞过程中的能量变化曲线、平台动力响应历程和被碰部位的损伤情况,为海洋平台的设计和损伤后的评估提供参考依据。
采用瞬态动力学方法分析导管架结构在外力作用下的动力响应问题。为研究生产储油平台的减震效果,建立平台有限元模型,施加外部载荷及约束条件,采用瞬态动力学方法得到平台的动力响应结果,为平台靠球减震系统研究提供理论依据。

图1 外输油轮靠泊状态Fig.1 Mooring state of the oil tanker
1 有限元分析模型
平台总体结构的有限元分析,是将整个平台结构离散为功能与原结构相当的有限元模型,按照实际结构情况划分节点和单元,然后把全部载荷等效为节点载荷作用在节点上,进而计算节点的位移和应力,最后算出单元应力而得到平台整体结构的应力状况和整体变形。平台有限元模型如图2所示。

图2 平台有限元模型Fig.2 Finite element model of the platform
1.1 平台结构和环境条件
PSP平台结构由三部分组成,即甲板模块、导管架支撑结构及基础结构。甲板模块由甲板板、甲板梁、立柱及斜撑组成。导管架支撑结构由立柱、水平撑、斜撑及水平撑角组成,导管架上还设有V型护舷、带缆走道等附属结构。控制环境条件由靠船设计工况决定:有义波高H=1 m,波周期T=4.5 s,表面流速V表=1.5 m/s,海底流速V底=0.6 m/s。
1.2 材料属性和单元类型
在有限元模型中,导管架所用钢的材料属性为线弹性材料,杨氏模量E=2.1×1011Pa,泊松比λ=0.3,密度ρ=7 850 kg/m3。平台采用PIPE16、PIPE59、SHELL63、BEAM188和MASS21共5种有限元单元。其中,PIPE16模拟泥面以下所有导管架和平台双层桩腿内管,PIPE59模拟泥面以上导管架,SHELL63模拟平台三层甲板,BEAM188模拟甲板横、纵骨架及其靠船排构件,MASS21模拟平台设备载荷质量点。
1.3 平台边界条件
平台模型采用10个刚性固定支座(8根主桩腿和2根靠船桩腿全约束)作为约束边界条件,其中8根主桩腿约束在泥面以下8.4 m处(6D=8.4 m,D为主桩腿桩径,D=1.4 m),2根靠船桩腿约束在泥面以下7.2 m处(6d=7.2 m,d为靠船桩腿桩径,d=1.2 m),边界条件可在计算模型中直接施加。
1.4 平台设备重量
按照平台重控报告[4]对平台甲板施加设备载荷。在瞬态动力分析过程中,设备重量不能采用力的形式施加在有限元模型中,为了模拟平台甲板设备自重及其重心高度,本文采用节点耦合方式施加设备重量。
首先确定各部分设备在各层甲板上的对应位置,选定该部分位置对应有限元模型中的节点,并将其复制到对应设备重心高度处,其次通过MASS21单元将设备重量均匀施加到复制后的节点上(每个节点质量等于该设备总重量除以对应节点个数),最后将其与甲板上对应节点进行全自由度耦合,如图3所示。
完成甲板设备重量的施加后,需要调整平台的材料密度,使平台有限元模型的总重量与平台实际总重量一致。
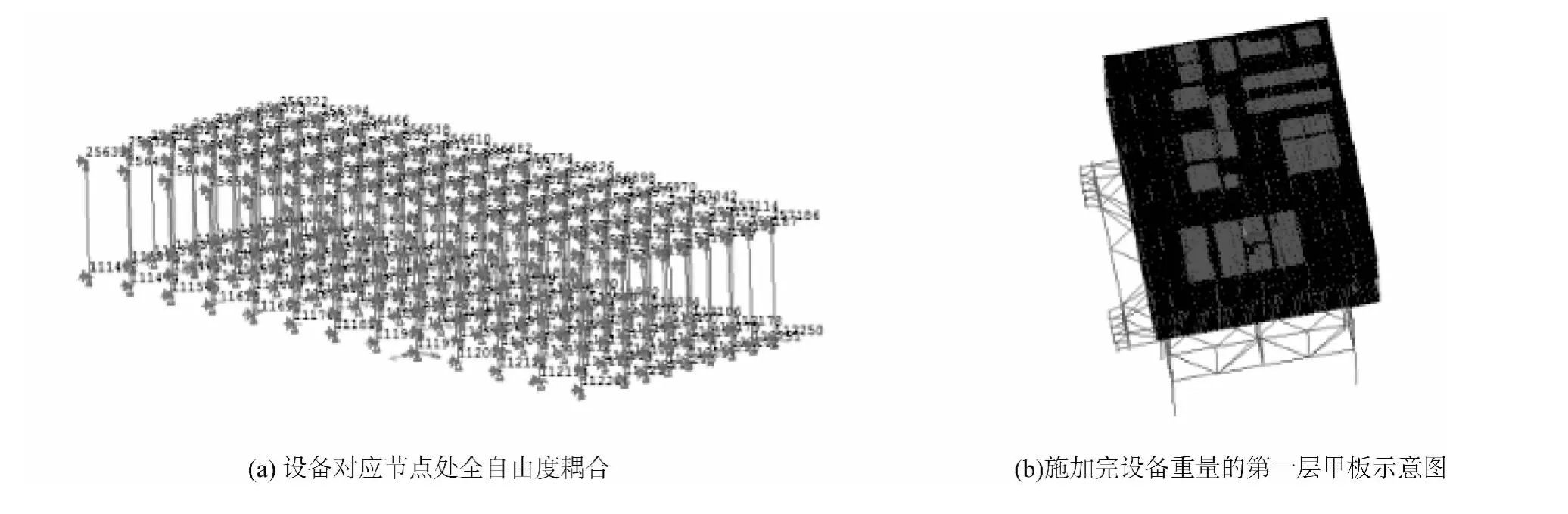
图3 耦合节点施加设备重量Fig.3 Exerting the weight of equipment by coupling nodes
2 5 000 t外输油轮靠泊力
刘硕[6]利用ANSYS软件计算得到了橡胶靠球的静刚度曲线,橡胶靠球为超弹性材料,力学特征模型采用的是Mooney-Rivlin模型,模型特征参数通过实验得到。秦尧[7]利用SESAM软件分析计算了5 000 t外输油轮的水动力特性,得到油轮幅频响应函数,将V型护弦与油轮接触位置作为刚度约束,得到没有靠球情况下碰撞力时程曲线。当有靠球时,将船体对靠球的作用简化为施加强制位移的高强度刚性板,碰撞初期主要考虑靠球的刚度,当靠球挤压到一定程度时V型护舷开始起主导作用,通过计算得到靠球-V型护弦联合刚度曲线,进而得到有靠球情况下靠船力时程曲线,如图4所示。
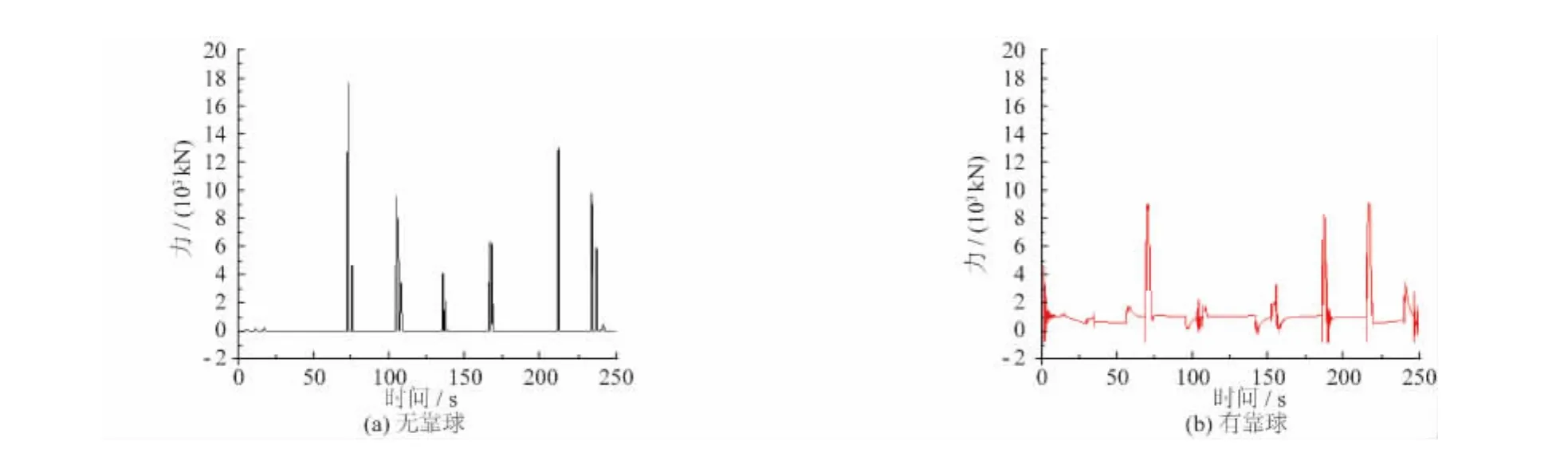
图4 有无靠球碰撞力时程曲线Fig.4 Travel-time curve of impact force
从图中可知,靠球有无对碰撞力时程曲线是有影响的。碰撞力都取随机的250 s,可以看出无球时碰撞力变化曲线呈脉冲型,250 s内出现6个脉冲,其余部分碰撞力极小,脉冲间隔约为30 s,最大碰撞力约1 700 t。有球时碰撞力变化呈现不规则情况,250 s内大致出现三个峰值,但其余部分也有明显的碰撞力,最大碰撞力削减到940 t,靠球改变了碰撞力的时程曲线,起到了缓冲的作用。
3 平台模态分析
使用ANSYS程序对结构进行模态分析。平台自振特性计算取前10阶。该平台自振周期较小,一阶周期2.25 s,二阶周期2.14 s,三阶周期1.57 s,图5和图6为平台前二阶振型,表1为平台前10阶自振周期。
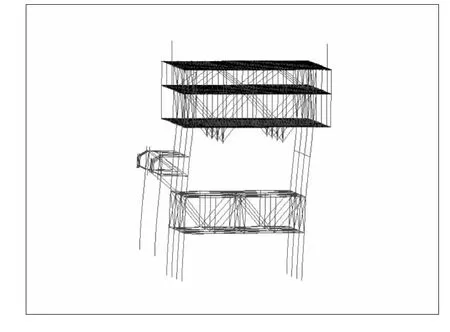
图5 平台一阶振型Fig.5 First mode of the platform

图6 平台二阶振型Fig.6 Second mode of the platform
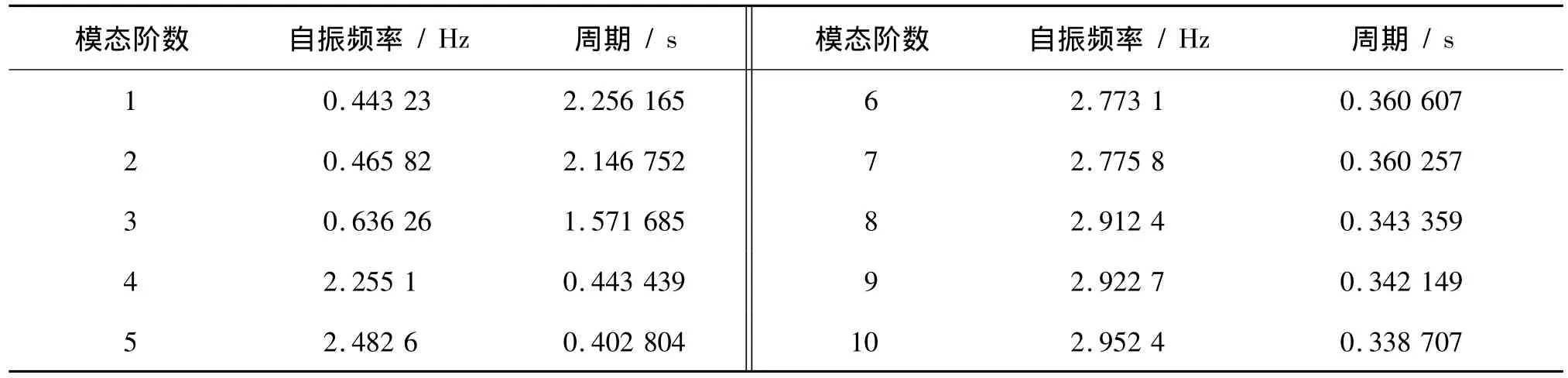
表1 平台自振频率Tab.1 The natural frequency of vibration of the platform
由图4和表1可以看出:无靠球时,靠船碰撞力呈脉冲型,峰值间隔约为30 s;有靠球时,靠船碰撞力和峰值间隔虽呈现不规则情况,但与平台自振周期相差甚远,故油轮碰撞不会引起平台共振。
4 瞬态动力分析
瞬态动力学分析是确定承受任意随时间变化载荷结构动力学响应的一种分析方法。它可以确定结构在稳态载荷、瞬态载荷和简谐载荷随意组合作用下的随时间变化的位移、应变、应力及内力。对于导管架平台的瞬态动力分析,结构惯性力和阻尼是必须考虑的重要因素。
这里瞬态动力分析采用的是一致质量矩阵,分析方法为完全法,它采用完整的系统矩阵计算瞬态响应,但计算时间较长。
ANSYS中阻尼的实现主要有五种形式,采用的是Alpha和Beta阻尼,它为与质量或刚度成比例的阻尼模型,即质量阻尼模型或刚度阻尼模型。阻尼矩阵[C]是在用这些常数乘以质量矩阵[M]和刚度矩阵[K]后计算出来的。阻尼矩阵[C]以及α和β的求解公式如下:

式中:ωi和ωj为任意给定的两阶自振频率;ξi和ξj为相应给定振型的阻尼比,脚标i、j表示对应振型的阶数。在ANSYS中假设ξi=ξj,通过模态分析得到前两阶自振频率ω1=0.443 23、ω2=0.465 82,然后代入上式。
平台受到的波浪载荷通过水表的方式施加在平台上;碰撞力通过载荷步文件施加在平台靠船排竖向构件上,为了让平台在波浪力作用下进入稳定,前60秒仅有波浪作用,60秒以后开始施加碰撞力,由于计算时间过长,每完成一次计算需要20小时,因此只选取碰撞力最大峰值前后25秒作为碰撞载荷施加在平台上,瞬态动力一共计算110秒时间历程。
4.1 位移时间历程
在动力分析中,得到平台不同位置处位移时间历程曲线,如图7所示。其中,对于甲板,1表示甲板边界附近,2表示甲板中点,3表示甲板边界中点;对于V型护舷,1、2表示护舷不同位置。图8显示了有无靠球甲板位置1位移时间历程曲线。
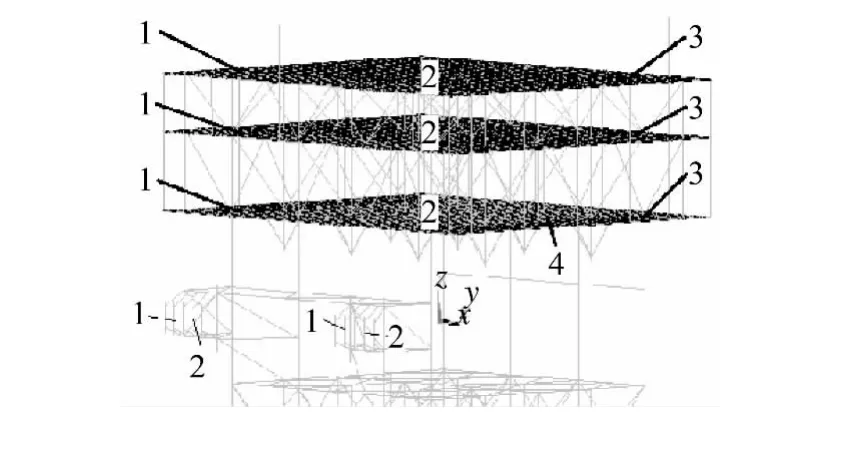
图7 关键点选取示意(位移)Fig.7 Key point of the platform(displacement)
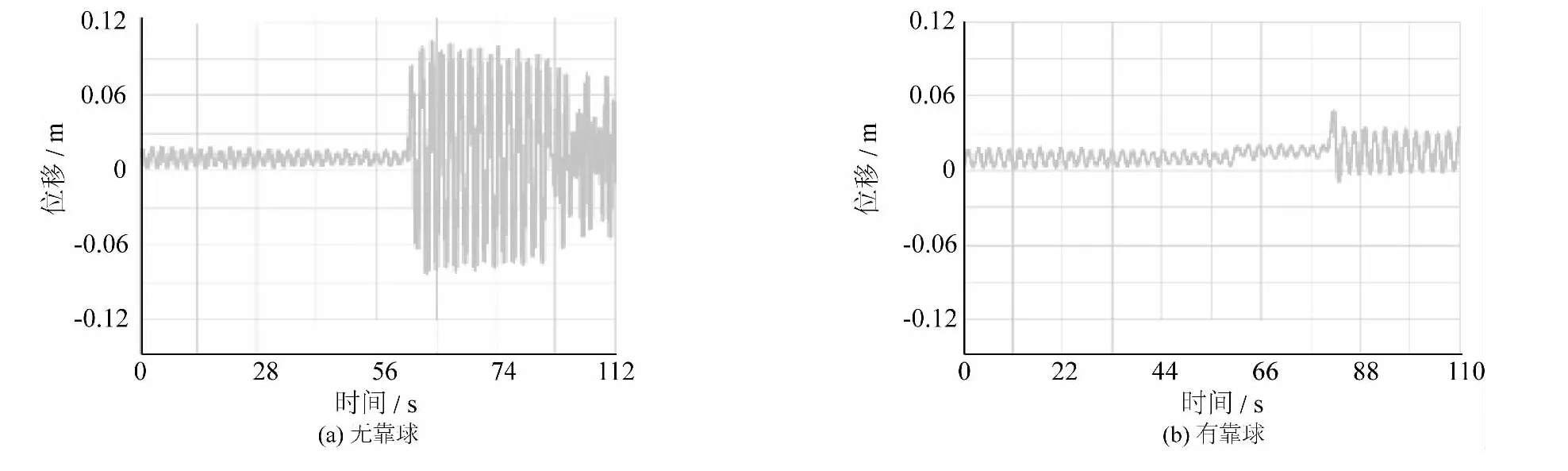
图8 甲板位置1有无靠球位移时间历程Fig.8 Travel-time curve of displacement response of deck positon 1
4.2 应力时间历程
在动力分析中,得到平台关键位置处轴应力时间历程曲线,如图9所示。平台受到碰撞力主要由V型护舷横向构件传递,故只考虑横向构件的轴应力。图10显示了有无靠球靠船排位置2处应力时间历程曲线。
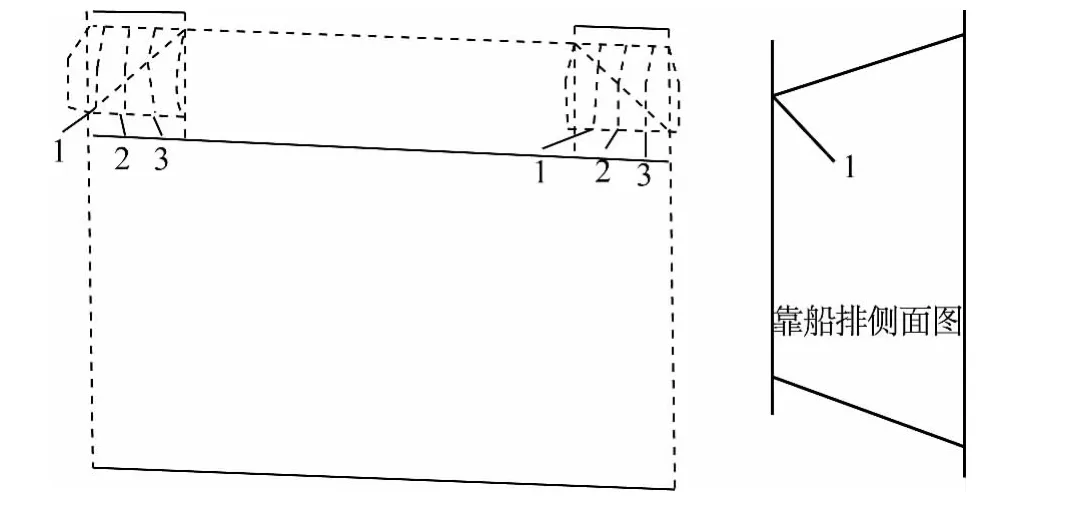
图9 关键点选取示意(应力)Fig.9 Key point of the platform(stress)
通过对比有无靠球的位移时间历程和应力时间历程得到:在无靠球的情况下,平台关键点位移峰值约为11 cm;有靠球情况下平台关键点位移峰值约为4.8 cm,可见靠球可以减小平台在靠船时产生的位移,大约减少56%。在无靠球情况下,平台关键点应力峰值约为20.1 MPa;有靠球情况下,平台关键点应力峰值约为15.7 MPa,可见靠球可以减小平台在靠船时平台关键节点处应力峰值,大约减少22%。橡胶靠球对平台起到良好的减振效果。
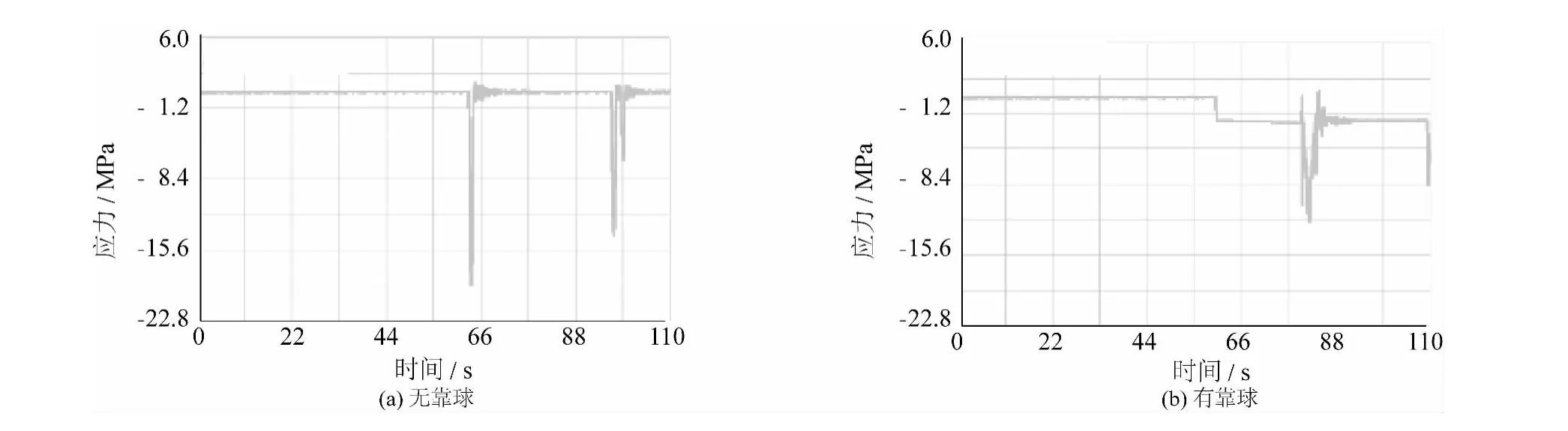
图10 靠船排位置2有无靠球应力时间历程Fig.10 Travel-time curve of stress response of shipboard positon 2
5 结语
运用ANSYS软件对生产储油平台在有无靠球下的碰撞力进行结构动力分析。首先建立平台模型,施加载荷,而后进行静力和模态分析,最后进行瞬态动力学分析,研究得到以下结论:
1)平台的有限元模型和实际平台相似程度很高,设备载荷的施加考虑了设备重心高度,确保了计算结果的准确性。
2)采用建立的有限元模型,通过瞬态动力分析,发现在增加靠球后,平台关键点位移峰值和应力峰值都明显降低,证明在油轮靠泊平台过程中引入靠球,对平台起到了良好的减振作用。
鉴于这里的研究工作,在实际工程中如遇到油轮靠泊平台晃动较大,可以采用橡胶靠球减震系统来降低平台运动响应。
[1] 王柳君.导管架型平台在确定性波浪力作用下的动力分析[J].水道港口,1986,2:26-32.(WANG Liu-jun.The dynamic analysis of jacket platform on deterministic wave load[J].Journal of Waterway and Harbor,1986,2:26-32.(in Chinese))
[2] 杨树耕.有限元分析软件ANSYS在海洋工程中的应用[J].中国海洋平台,2000(2):15-16.(YANG Shu-geng.The application of finite element analysis software ANSYS in Ocean Engineering[J].China Offshore Platform,2000(2):15-16.(in Chinese))
[3] 李茜,杨树耕.采用ANSYS程序的自升式平台结构有限元动力分析[J].中国海洋平台,2003,18(4):41-46.(LI Qian,YANG Shu-geng.The finite element dynamic analysis for self-elevating platform by ANSYS multi-physics program[J].China Offshore Platform,2003,18(4):41-46.(in Chinese))
[4] 周广利,白若阳.导管架平台的动力分析[J].中国海洋平台.2006,21(1):45-48.(ZHOU Guang-li,BAI Ruo-yang.Dynamic analysis for jacket platform[J].China Offshore Platform,2006,21(1):45-48.(in Chinese))
[5] 陈建民,秦立成.海洋平台在船舶撞击载荷作用下的动力响应[C]//第十三届中国海洋(岸)工程学术讨论会论文集.北京:海洋出版社,2007:50-54.(CHEN Jian-min,QIN Li-cheng.The dynamic response of offshore platform under impact force of vessel[C]//The Thirteenth Session of the China Ocean(Bank)Engineering Symposium.Beijing:Ocean Press,2007:50-54.(in Chinese))
[6] 刘硕,杨树耕,唐友刚,等.实心球形橡胶护舷减振性能非线性分析[J].海洋工程,待发表.(LIU Shuo,YANG Shu-geng,TANG You-gang,et al.Nonlinear analysis of damping performance for a solid spherical rubber fender[J].The Ocean Engineering,To be published.(in Chinese))
[7] 秦尧,唐友刚,杨树耕,等.系泊油轮靠球减振性能分析[J].中国海洋平台,待发表.(QIN Yao,TANG You-gang,YANG Shug-eng,et al.The performance analysis for vibration damping of mooring tanker[J].China Offshore Platform,To be published.(in Chinese))
[8] 竺艳蓉.海洋工程波浪力学[M].天津:天津大学出版社,1991.(ZHU Yan-rong.Wave mechanics for ocean engineering[M].Tianjin:Tianjin University Press,1991.(in Chinese))
